You might also like
- Create PDF Book App in Android Studio - Download Free PDF Book Source Code PDFDocument6 pagesCreate PDF Book App in Android Studio - Download Free PDF Book Source Code PDFshafiq09090% (1)
- 3-D Anatomically Based Dynamic Modeling of The Human Knee To Include Tibio-Femoral and Patello-Femoral JointsDocument10 pages3-D Anatomically Based Dynamic Modeling of The Human Knee To Include Tibio-Femoral and Patello-Femoral JointsAki NikNo ratings yet
- Paul's Defence of His Apostleship - Gal 1 - 2Document13 pagesPaul's Defence of His Apostleship - Gal 1 - 231songofjoyNo ratings yet
- Week 1Document34 pagesWeek 1Mitchie Faustino100% (1)
- Biomechanical Behavior of The Knee Joint Using ANSYSDocument14 pagesBiomechanical Behavior of The Knee Joint Using ANSYSLuchitop Campoverde100% (1)
- Cases Torts 7-29-17 DigestDocument1 pageCases Torts 7-29-17 Digestczabina fatima delicaNo ratings yet
- Hip Joint Biomechanics PDFDocument20 pagesHip Joint Biomechanics PDFJohannesSchoppmannNo ratings yet
- Analysis of Four-Bar Linkages Suitable For Above-Knee ProsthesisDocument9 pagesAnalysis of Four-Bar Linkages Suitable For Above-Knee ProsthesisMai Văn ĐịnhNo ratings yet
- Research Article: An Investigation Into A Gear-Based Knee Joint Designed For Lower Limb ProsthesisDocument15 pagesResearch Article: An Investigation Into A Gear-Based Knee Joint Designed For Lower Limb Prosthesissayem.firstsmithcorpNo ratings yet
- Kinematic and Dynamic Performance of Prosthetic Knee Joint Using Six-Bar MechanismDocument10 pagesKinematic and Dynamic Performance of Prosthetic Knee Joint Using Six-Bar MechanismahmadNo ratings yet
- A Preclinical Method For Evaluating The Kinematics - 2019 - Medical EngineeringDocument7 pagesA Preclinical Method For Evaluating The Kinematics - 2019 - Medical EngineeringEzgi PelitNo ratings yet
- 2 Dof Ankle FootDocument20 pages2 Dof Ankle FootMustafa Oğuz DALNo ratings yet
- 1 s2.0 S0094114X17302252 MainDocument23 pages1 s2.0 S0094114X17302252 MainKaviraj SenguntharNo ratings yet
- 1 s2.0 S1350453322000790 MainDocument8 pages1 s2.0 S1350453322000790 MainNANDHINIK 19BM059No ratings yet
- Abbasnejad 2016Document18 pagesAbbasnejad 2016Yash MittalNo ratings yet
- Koop Man 2014Document12 pagesKoop Man 2014Elizabeth CominaNo ratings yet
- Quinzi2014 PDFDocument12 pagesQuinzi2014 PDFHabib Nur MuhammadNo ratings yet
- SP TT Kelompok 5Document21 pagesSP TT Kelompok 5Aristyo RajaNo ratings yet
- Kinematic Analysis of A Six-Degree-Of-Freedom Model Based On ISB Recommendation A Repeatability Analysis and Comparison With Convetional Gait ModelDocument9 pagesKinematic Analysis of A Six-Degree-Of-Freedom Model Based On ISB Recommendation A Repeatability Analysis and Comparison With Convetional Gait ModelLaura VNo ratings yet
- FT Method For Locating An Optimal "Fixed" Axis I F Rotation For T I e Human Knee JointDocument7 pagesFT Method For Locating An Optimal "Fixed" Axis I F Rotation For T I e Human Knee JointGERARDO TORRES RUIZNo ratings yet
- 2006 Design of Biped Robot With Heterogeneous Legs For Advanced Prosthetic Knee Application Kim2006Document4 pages2006 Design of Biped Robot With Heterogeneous Legs For Advanced Prosthetic Knee Application Kim2006Dawit AssfawNo ratings yet
- Type Synthesis of Self-Alignment Parallel Ankle Rehabilitation Robot With Suitable Passive Degrees of FreedomDocument16 pagesType Synthesis of Self-Alignment Parallel Ankle Rehabilitation Robot With Suitable Passive Degrees of Freedommo.hajian1402No ratings yet
- Zadravc Planar Arm Trajectory OptimizationDocument13 pagesZadravc Planar Arm Trajectory OptimizationSeddik KhemaissiaNo ratings yet
- Kuo2010 Article BiomechanicalAnalysisOfTheLumbDocument13 pagesKuo2010 Article BiomechanicalAnalysisOfTheLumbchristian sanchezNo ratings yet
- A New Controlling Parameter in Design of Above Knee ProsthesisDocument8 pagesA New Controlling Parameter in Design of Above Knee ProsthesismohsinslatchNo ratings yet
- A Finite Element and Experimental Investigation of The Femoral Component Mechanics in A Total Hip Arthroplasty - Cameron Gordon Bell - Thesis - 2005Document388 pagesA Finite Element and Experimental Investigation of The Femoral Component Mechanics in A Total Hip Arthroplasty - Cameron Gordon Bell - Thesis - 2005Henrique Rodrigues OliveiraNo ratings yet
- Yang 2018 J. Phys. Conf. Ser. 1087 062004Document7 pagesYang 2018 J. Phys. Conf. Ser. 1087 062004Jayakrishnan P SNo ratings yet
- Upper-Body Motion Mode Recognition Based On Imus For A Dynamic Spine BraceDocument4 pagesUpper-Body Motion Mode Recognition Based On Imus For A Dynamic Spine BraceLaura CursaruNo ratings yet
- Philosophy and Physics of Mandibular Hinge Axis: A Review: International Journal of Scientific Research April 2014Document3 pagesPhilosophy and Physics of Mandibular Hinge Axis: A Review: International Journal of Scientific Research April 2014waf51No ratings yet
- Journal of Vibration and Control October 2012Document8 pagesJournal of Vibration and Control October 2012anand rengarajNo ratings yet
- Two-Degree Adjustable Exoskeleton For Assistance of The Human Arm Using A Mechanical System of Fast Assembly and UpgradabilityDocument15 pagesTwo-Degree Adjustable Exoskeleton For Assistance of The Human Arm Using A Mechanical System of Fast Assembly and UpgradabilityTYTNo ratings yet
- Robust Adaptive Sliding Mode Admittance Control ofDocument41 pagesRobust Adaptive Sliding Mode Admittance Control ofJubei YanaikiNo ratings yet
- Journal of Neuroengineering and RehabilitationDocument16 pagesJournal of Neuroengineering and RehabilitationFikri DzakyNo ratings yet
- Walking Movement in RobotDocument24 pagesWalking Movement in RobotNandy ObNo ratings yet
- Design Characteristics of Pediatric Prosthetic Knees: Jan Andrysek, Stephen Naumann, and William L. CleghornDocument10 pagesDesign Characteristics of Pediatric Prosthetic Knees: Jan Andrysek, Stephen Naumann, and William L. CleghornMohd BadrulNo ratings yet
- Nonlinear Vibration Analysis of An Axially Moving Drillstring System With Time Dependent Axial Load and Axial Velocity in Inclined WellDocument18 pagesNonlinear Vibration Analysis of An Axially Moving Drillstring System With Time Dependent Axial Load and Axial Velocity in Inclined Wellmohdsolihat1100% (1)
- PoseDocument14 pagesPoseYuri KaranNo ratings yet
- Weyand Et Al 2009 The Fastest Runner On Artificial Legs Different Limbs Similar FunctionDocument9 pagesWeyand Et Al 2009 The Fastest Runner On Artificial Legs Different Limbs Similar Functiontypp3t5r3gzNo ratings yet
- On The Kinematic Design of Anthropomorphic Lower Limb Exoskeletons and Their Matching MovementDocument9 pagesOn The Kinematic Design of Anthropomorphic Lower Limb Exoskeletons and Their Matching MovementZehra ÇİFCİBAŞINo ratings yet
- Synthesis of A Watt II Six-Bar Linkage in The Design of A Hand Rehab RobotDocument13 pagesSynthesis of A Watt II Six-Bar Linkage in The Design of A Hand Rehab RobotJuan MNo ratings yet
- Design and Control of A Lower Limb Exoskeleton For Robot-Assisted Gait TrainingDocument16 pagesDesign and Control of A Lower Limb Exoskeleton For Robot-Assisted Gait TrainingYalçın SabihaNo ratings yet
- Design and Control of A Parallel Robot For Ankle RehabilitationDocument14 pagesDesign and Control of A Parallel Robot For Ankle RehabilitationSushi RollNo ratings yet
- Perturbation ExperimentDocument14 pagesPerturbation Experimenttanvir anwarNo ratings yet
- Kinematic Motion Analysis of The Human Arm During A Manipulation TaskDocument7 pagesKinematic Motion Analysis of The Human Arm During A Manipulation TaskPedro RoyuelaNavarroNo ratings yet
- Characterization of Ankle Function During Stair Ambulation: D.H. Gates, J. Lelas, U. Della Croce, H. Herr, P. BonatoDocument4 pagesCharacterization of Ankle Function During Stair Ambulation: D.H. Gates, J. Lelas, U. Della Croce, H. Herr, P. BonatoIbrahim ImamNo ratings yet
- An Adaptive Wearable Parallel Robot For The Treatment of Ankle Injuries 2014Document12 pagesAn Adaptive Wearable Parallel Robot For The Treatment of Ankle Injuries 2014newkid2202100% (1)
- MoveNet A Deep Neural Network For Joint Profile Prediction Across Variable Walking Speeds and SlopesDocument11 pagesMoveNet A Deep Neural Network For Joint Profile Prediction Across Variable Walking Speeds and SlopesZheng ZitongNo ratings yet
- 1 s2.0 S0094114X22000507 MainDocument16 pages1 s2.0 S0094114X22000507 MainMustafa Oğuz DALNo ratings yet
- Active Lower Limb Prosthetics: A Systematic Review of Design Issues and SolutionsDocument15 pagesActive Lower Limb Prosthetics: A Systematic Review of Design Issues and SolutionsAlejandro RosalesNo ratings yet
- Análisis Biomecánico de La Fusión Intersomática Lumbar Con Un Modelo Hiperelástico Anisotrópico para La Fibrosis Del AnilloDocument13 pagesAnálisis Biomecánico de La Fusión Intersomática Lumbar Con Un Modelo Hiperelástico Anisotrópico para La Fibrosis Del AnilloAlejandro Marcelo Samalvides PachecoNo ratings yet
- Evolutionary Synthesis of Mechanisms Applied To The Design of An Exoskeleton For Finger RehabilitationDocument13 pagesEvolutionary Synthesis of Mechanisms Applied To The Design of An Exoskeleton For Finger RehabilitationCesar Augusto Arriaga ArriagaNo ratings yet
- Defining The Medial-Lateral Axis of An Anatomical Femur Coordinate System Using Freehand 3D Ultrasound Imaging.Document6 pagesDefining The Medial-Lateral Axis of An Anatomical Femur Coordinate System Using Freehand 3D Ultrasound Imaging.Ricardo IllaNo ratings yet
- A Leg Exoskeleton Command Unit For Human Walking RehabilitationDocument6 pagesA Leg Exoskeleton Command Unit For Human Walking RehabilitationsujinaNo ratings yet
- Articulo FisicaDocument12 pagesArticulo FisicaMarlon PerenguezNo ratings yet
- Research Article: Pilot Study of A Powered Exoskeleton For Upper Limb Rehabilitation Based On The WheelchairDocument12 pagesResearch Article: Pilot Study of A Powered Exoskeleton For Upper Limb Rehabilitation Based On The WheelchairCostinel BogheanuNo ratings yet
- Design Forms of Total Knee Replacement: P S Walker and S SathasivamDocument19 pagesDesign Forms of Total Knee Replacement: P S Walker and S SathasivamGERARDO TORRES RUIZNo ratings yet
- On Passive Quadrupedal Bounding With Flexible Linear TorsoDocument8 pagesOn Passive Quadrupedal Bounding With Flexible Linear TorsoInternational Journal of Robotics, Theory and ApplicationsNo ratings yet
- Protesis 13Document9 pagesProtesis 13ana márquezNo ratings yet
- Trajectory Planning For Exoskeleton Robot by Using Cubic and Quintic Polynomial EquationDocument5 pagesTrajectory Planning For Exoskeleton Robot by Using Cubic and Quintic Polynomial Equationsifo mohNo ratings yet
- PengDocument10 pagesPengBarath NMNo ratings yet
- Validity and Reliability of Shyam 360 Posture Grid: A Tool For The Assessment of Human PostureDocument4 pagesValidity and Reliability of Shyam 360 Posture Grid: A Tool For The Assessment of Human PostureBennat RajNo ratings yet
- Orthopaedics & Traumatology: Surgery & ResearchDocument7 pagesOrthopaedics & Traumatology: Surgery & ResearchMohan DesaiNo ratings yet
- Initial Biomechanical Analysis and Modeling of Transfemoral Amputee GaitDocument7 pagesInitial Biomechanical Analysis and Modeling of Transfemoral Amputee GaitAshwini Kumar BaluguriNo ratings yet
- Effect of Prosthetic Alignment Changes On Socket Reaction Moment Impulse During Walking in Transtibial AmputeesDocument19 pagesEffect of Prosthetic Alignment Changes On Socket Reaction Moment Impulse During Walking in Transtibial AmputeesNada GhammemNo ratings yet
- Humanoid Robot Lola - Research Platform For High-SpeedwalkingDocument11 pagesHumanoid Robot Lola - Research Platform For High-SpeedwalkingNada GhammemNo ratings yet
- Annals of SurgeryDocument12 pagesAnnals of SurgeryNada GhammemNo ratings yet
- Les TypeDocument95 pagesLes TypeNada GhammemNo ratings yet
- Criterion and Construct Validity of Prosthesis-IntDocument20 pagesCriterion and Construct Validity of Prosthesis-IntNada GhammemNo ratings yet
- Stress Analysis of Four-Bar Linkage Transfemoral Prosthetic in Gait CycleDocument5 pagesStress Analysis of Four-Bar Linkage Transfemoral Prosthetic in Gait CycleNada GhammemNo ratings yet
- Design and Implementation of Prosthetic Arm UsingDocument6 pagesDesign and Implementation of Prosthetic Arm UsingNada GhammemNo ratings yet
- Knowledge-Based System For Guided Modeling of SockDocument16 pagesKnowledge-Based System For Guided Modeling of SockNada GhammemNo ratings yet
- Kinematics Synthesis of A New Generation of RapidDocument30 pagesKinematics Synthesis of A New Generation of RapidNada GhammemNo ratings yet
- Design of A Novel Knee Prosthesis Mechanism With Good StabilityDocument7 pagesDesign of A Novel Knee Prosthesis Mechanism With Good StabilityNada GhammemNo ratings yet
- Development of A Hinge Compatible With The Kinematics of The Knee JointDocument14 pagesDevelopment of A Hinge Compatible With The Kinematics of The Knee JointNada GhammemNo ratings yet
- 42 - ACMSEA - Rajesh (3) GGGDocument9 pages42 - ACMSEA - Rajesh (3) GGGNada GhammemNo ratings yet
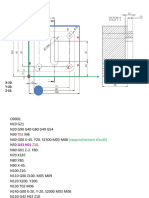
- Exercice Fraisage Partie 1Document3 pagesExercice Fraisage Partie 1Nada GhammemNo ratings yet
- A Bio-Inspired Condylar Knee Joint For Leg Amputees and For Knee ImplantsDocument13 pagesA Bio-Inspired Condylar Knee Joint For Leg Amputees and For Knee ImplantsNada GhammemNo ratings yet
- Hybrid Actuation Systems For Lightweight Transfemoral ProsthesesDocument3 pagesHybrid Actuation Systems For Lightweight Transfemoral ProsthesesNada GhammemNo ratings yet
- Evolution of Artificial Limbs: Associate Professor and Hod I/C Deptt of Orthopaedics NeigrihmsDocument51 pagesEvolution of Artificial Limbs: Associate Professor and Hod I/C Deptt of Orthopaedics NeigrihmsNada GhammemNo ratings yet
- 10 5923 J Ajbe 20130305 01Document8 pages10 5923 J Ajbe 20130305 01Nada GhammemNo ratings yet
- A Method To Analyze Dynamics Properties of Transfemoral ProsthesisDocument5 pagesA Method To Analyze Dynamics Properties of Transfemoral ProsthesisNada GhammemNo ratings yet
- C-Leg Prosthetic System. Instructions For Use (Qualified Personnel)Document28 pagesC-Leg Prosthetic System. Instructions For Use (Qualified Personnel)Nada GhammemNo ratings yet
- Optimal Design of A Transfemoral Prosthesis With Energy Storage and RegenerationDocument6 pagesOptimal Design of A Transfemoral Prosthesis With Energy Storage and RegenerationNada GhammemNo ratings yet
- Robo LegDocument3 pagesRobo LegNada GhammemNo ratings yet
- Interactive Construction Interactive Fab PDFDocument8 pagesInteractive Construction Interactive Fab PDFNada GhammemNo ratings yet
- Secure Microprocessor-Controlled Prosthetic Leg For Elderly Amputees: Preliminary ResultsDocument15 pagesSecure Microprocessor-Controlled Prosthetic Leg For Elderly Amputees: Preliminary ResultsNada GhammemNo ratings yet
- Eliminate Zombie Nouns and Minimize Passive Voice: Plain LanguageDocument2 pagesEliminate Zombie Nouns and Minimize Passive Voice: Plain LanguagePădure IonuțNo ratings yet
- MLOG GX CMXA75 v4.05 322985e0 UM-EN PDFDocument342 pagesMLOG GX CMXA75 v4.05 322985e0 UM-EN PDFGandalf cimarillonNo ratings yet
- Low Steam Cane - Almoiz Industries Road To SuccessDocument9 pagesLow Steam Cane - Almoiz Industries Road To SuccessArif ShafiNo ratings yet
- Machine Tools Design: InstructorsDocument31 pagesMachine Tools Design: InstructorsAladdin AdelNo ratings yet
- Out To Lunch: © This Worksheet Is FromDocument1 pageOut To Lunch: © This Worksheet Is FromResian Garalde BiscoNo ratings yet
- Animals Living in LithuaniaDocument12 pagesAnimals Living in LithuaniaSuiliwasNo ratings yet
- Nonfiction Reading Test The Coliseum: Directions: Read The Following Passage and Answer The Questions That Follow. ReferDocument3 pagesNonfiction Reading Test The Coliseum: Directions: Read The Following Passage and Answer The Questions That Follow. ReferYamile CruzNo ratings yet
- Joget Mini Case Studies TelecommunicationDocument3 pagesJoget Mini Case Studies TelecommunicationavifirmanNo ratings yet
- Parkin 8e TIF Ch27Document51 pagesParkin 8e TIF Ch27Pranta SahaNo ratings yet
- RSC SCST Programme Briefing For Factories enDocument4 pagesRSC SCST Programme Briefing For Factories enmanikNo ratings yet
- CLASSIFICATION OF COSTS: Manufacturing: Subhash Sahu (Cs Executive Student of Jaipur Chapter)Document85 pagesCLASSIFICATION OF COSTS: Manufacturing: Subhash Sahu (Cs Executive Student of Jaipur Chapter)shubhamNo ratings yet
- Axe in Pakistan PDFDocument22 pagesAxe in Pakistan PDFAdarsh BansalNo ratings yet
- Business Management Business ManagementDocument31 pagesBusiness Management Business ManagementDoyieNo ratings yet
- RCM Pricelist Online Store 2Document14 pagesRCM Pricelist Online Store 2OJ Alexander NadongNo ratings yet
- 2.peace Treaties With Defeated PowersDocument13 pages2.peace Treaties With Defeated PowersTENDAI MAVHIZANo ratings yet
- Activity 1 Which Is WhichDocument1 pageActivity 1 Which Is WhichRhanna Lei SiaNo ratings yet
- College Physics Global 10th Edition Young Solutions ManualDocument25 pagesCollege Physics Global 10th Edition Young Solutions ManualSaraSmithdgyj100% (57)
- Dolphin Is An a-WPS OfficeDocument3 pagesDolphin Is An a-WPS Officeinova ilhamiNo ratings yet
- Kuis 4Document10 pagesKuis 4Deri AntoNo ratings yet
- Department of Education: Wawa Elementary SchoolDocument2 pagesDepartment of Education: Wawa Elementary SchoolJONATHAN CALAGUINo ratings yet
- Culvert StatementDocument4 pagesCulvert StatementRubul Prasad DasNo ratings yet
- Account StatementDocument12 pagesAccount StatementbadramostuNo ratings yet
- Listening Test Sweeney Todd, Chapter 4: 1 C. Zwyssig-KliemDocument3 pagesListening Test Sweeney Todd, Chapter 4: 1 C. Zwyssig-KliemCarole Zwyssig-KliemNo ratings yet
- Artikel Andi Nurindah SariDocument14 pagesArtikel Andi Nurindah Sariapril yansenNo ratings yet
- Monthly Film Bulletin: 1T1IcqDocument12 pagesMonthly Film Bulletin: 1T1IcqAlfred_HitzkopfNo ratings yet
- One Tequila, Two Tequila, Three Tequila, Floor!: The Science Behind A HangoverDocument3 pagesOne Tequila, Two Tequila, Three Tequila, Floor!: The Science Behind A Hangoverkristal eliasNo ratings yet