You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Electrical Thumb Rules You MUST Follow (Part 1) - EEPDocument4 pagesElectrical Thumb Rules You MUST Follow (Part 1) - EEPAshokkumar ManoharanNo ratings yet
- ESAS - Pre Board August 2016 W AnswersDocument7 pagesESAS - Pre Board August 2016 W AnswersZnevba Quintano67% (3)
- Floating Neutral Impacts in Power DistributionDocument8 pagesFloating Neutral Impacts in Power DistributionvpurillaNo ratings yet
- P.H. Groggins Unit Processes in Organic Synthesis PDFDocument1,076 pagesP.H. Groggins Unit Processes in Organic Synthesis PDFSintong Leonardo Situngkir90% (10)
- Final STEAG Energy Saving in CPPDocument17 pagesFinal STEAG Energy Saving in CPPEdwin TanNo ratings yet
- GE Energy Technical TrainingDocument3 pagesGE Energy Technical TrainingscribdkhatnNo ratings yet
- Water For Hydrogen Production Dec. 2023 by IRENADocument66 pagesWater For Hydrogen Production Dec. 2023 by IRENAAlb FirNo ratings yet
- Using Arduino With Matlab and Simulink PDFDocument15 pagesUsing Arduino With Matlab and Simulink PDFPrem KumarNo ratings yet
- Co DesignDocument18 pagesCo DesignPrem KumarNo ratings yet
- 4 - Types of DC Chopper PDFDocument38 pages4 - Types of DC Chopper PDFPrem KumarNo ratings yet
- Conclusion: InferenceDocument4 pagesConclusion: InferencePrem KumarNo ratings yet
- Cognitive Psychology PDFDocument30 pagesCognitive Psychology PDFPrem KumarNo ratings yet
- Chapter 4Document50 pagesChapter 4Prem KumarNo ratings yet
- Speed Control of Brushless DC Motor: Three Phase Voltage Source InverterDocument1 pageSpeed Control of Brushless DC Motor: Three Phase Voltage Source InverterPrem KumarNo ratings yet
- Chapter 2Document41 pagesChapter 2Prem KumarNo ratings yet
- Resonant Frequency Andfrequency Response of A RLC Circuit: X X R ZDocument5 pagesResonant Frequency Andfrequency Response of A RLC Circuit: X X R ZPrem KumarNo ratings yet
- Apparatus Required:-: Frequency Response of Parallel Resonance CircuitDocument3 pagesApparatus Required:-: Frequency Response of Parallel Resonance CircuitPrem KumarNo ratings yet
- CKT Mesh AnalysisDocument3 pagesCKT Mesh AnalysisPrem KumarNo ratings yet
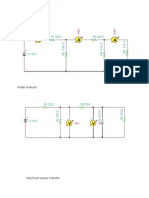
- Name of The Component Range Type Quantity: Aim: Maximum Power TransferDocument3 pagesName of The Component Range Type Quantity: Aim: Maximum Power TransferPrem KumarNo ratings yet
- Instruction For Freezer CP-402 MTRIANGEL BRANDDocument9 pagesInstruction For Freezer CP-402 MTRIANGEL BRANDHenry Nicolas Caballero TorresNo ratings yet
- W1V3 - Actors & Challenges - HandoutDocument7 pagesW1V3 - Actors & Challenges - HandoutRahmat HidayatNo ratings yet
- Royal Enfield BULLET ELECTRICS (Charging) 1999 On PDFDocument2 pagesRoyal Enfield BULLET ELECTRICS (Charging) 1999 On PDFmanri77No ratings yet
- Exp-5 Heat Balance Sheet PDFDocument5 pagesExp-5 Heat Balance Sheet PDFNarender NarruNo ratings yet
- LT3751 Demo Circuit 1322 Quick Start Guide LT3751 Capacitor Charger Controller With RegulationDocument4 pagesLT3751 Demo Circuit 1322 Quick Start Guide LT3751 Capacitor Charger Controller With RegulationTiago FrisonNo ratings yet
- Vegetable Oil As An Alternative Fuel: by Samantha, Stu, Evan and MikeDocument14 pagesVegetable Oil As An Alternative Fuel: by Samantha, Stu, Evan and MikeSagarNo ratings yet
- Seminor MohanDocument15 pagesSeminor MohanNandkumar GowdaNo ratings yet
- Development of Bamboo Sector in The VidarbhaDocument2 pagesDevelopment of Bamboo Sector in The Vidarbhatina21jangidNo ratings yet
- Addis Ababa Science & Technology UniversityDocument34 pagesAddis Ababa Science & Technology UniversityHaileleul BiaznNo ratings yet
- Heinz P Bloch and John JDocument3 pagesHeinz P Bloch and John JAnonymous ffje1rpaNo ratings yet
- Gate Pass CancellationDocument2 pagesGate Pass CancellationArush SrivastavaNo ratings yet
- View Revised Report 1262023Document5 pagesView Revised Report 1262023Zennie AbrahamNo ratings yet
- Harmonic Mitigation in Voltage Source Converters Based HVDC System Using 12-Pulse AC-DC ConvertersDocument6 pagesHarmonic Mitigation in Voltage Source Converters Based HVDC System Using 12-Pulse AC-DC ConvertersHelvécioCaldeiraJuniorNo ratings yet
- Impact of VSC Control Strategies and Incorporation of Synchronous Condensers On Distance Protection Under Unbalanced FaultsDocument10 pagesImpact of VSC Control Strategies and Incorporation of Synchronous Condensers On Distance Protection Under Unbalanced FaultspouyanNo ratings yet
- FM Spaj141c en BbaDocument68 pagesFM Spaj141c en Bbathanhnguyen81No ratings yet
- Hydraulic Turbines PDFDocument16 pagesHydraulic Turbines PDFMuhammad UmerNo ratings yet
- Wärtsilä Fuelflex Injection Control Unit Upgrade: Reliable Operation Regardless of Fuel Type Key BenefitsDocument2 pagesWärtsilä Fuelflex Injection Control Unit Upgrade: Reliable Operation Regardless of Fuel Type Key BenefitsKarthik RajNo ratings yet
- Energy PowerpointDocument20 pagesEnergy Powerpointapi-377646239No ratings yet
- Converting My Volkswagen Jetta To A Vegetable Oil CarDocument2 pagesConverting My Volkswagen Jetta To A Vegetable Oil CarGulf Restoration NetworkNo ratings yet
- Microdosimetry Experimental Methods and ApplicationsDocument219 pagesMicrodosimetry Experimental Methods and Applicationsseba gNo ratings yet
- One Line Diagram of 132 KV Grid Station Khanewal (01)Document8 pagesOne Line Diagram of 132 KV Grid Station Khanewal (01)Mudasur100% (4)
- Ghanshyam Verma HewDocument104 pagesGhanshyam Verma HewManoj KeeyanNo ratings yet
- EDP, Principle Power Partner On Deep-Water Offshore Wind: Services Solutions Cleantech Forum Events Jobs About UsDocument2 pagesEDP, Principle Power Partner On Deep-Water Offshore Wind: Services Solutions Cleantech Forum Events Jobs About UsVijay GopiKrishnanNo ratings yet