You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- SASTRA Discrete Maths SyllabusDocument2 pagesSASTRA Discrete Maths SyllabusstarNo ratings yet
- Lab Program C++ First Year SASTRA UniversityDocument6 pagesLab Program C++ First Year SASTRA UniversitystarNo ratings yet
- Plane and Solid Geometry ExamDocument3 pagesPlane and Solid Geometry ExamScott Pilgrim100% (1)
- SASTRA University Consolidated Elective List Odd SemDocument1 pageSASTRA University Consolidated Elective List Odd SemstarNo ratings yet
- SASTRA OS MCQ BankDocument21 pagesSASTRA OS MCQ BankstarNo ratings yet
- C Full ProgramsDocument26 pagesC Full Programsstar100% (1)
- IT Syllabus SASTRA 2019 OnwardsDocument40 pagesIT Syllabus SASTRA 2019 OnwardsstarNo ratings yet
- Java Programming Lab Manual Sastra University........Document17 pagesJava Programming Lab Manual Sastra University........Kavin Cavin100% (1)
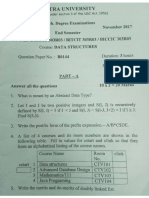
- Data Structure Qpaper2 SASTRA UnivDocument28 pagesData Structure Qpaper2 SASTRA UnivstarNo ratings yet
- Unit 4 - Power Supply, DC Voltmeter, DC Ammeter SASTRA UniversityDocument25 pagesUnit 4 - Power Supply, DC Voltmeter, DC Ammeter SASTRA UniversitystarNo ratings yet
- SASTRA CSE 5th SemDocument2 pagesSASTRA CSE 5th SemstarNo ratings yet
- C Language: Day Topics HoursDocument4 pagesC Language: Day Topics HoursstarNo ratings yet
- Unit 1 - IV Practice Questions SASTRA University First YearDocument16 pagesUnit 1 - IV Practice Questions SASTRA University First YearstarNo ratings yet
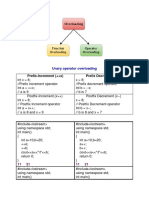
- Operator Overloading SASTRA University C++ First YearDocument21 pagesOperator Overloading SASTRA University C++ First YearstarNo ratings yet
- Practice Questionswith Answers SASTRA University First YearDocument14 pagesPractice Questionswith Answers SASTRA University First YearstarNo ratings yet
- Mock Test Question and Ans C ++ SASTRA UniversityDocument2 pagesMock Test Question and Ans C ++ SASTRA UniversitystarNo ratings yet
- C++ Introduction SASTRA University First YearDocument37 pagesC++ Introduction SASTRA University First YearstarNo ratings yet
- CPP All Programs-2019 SASTRA UniversityDocument60 pagesCPP All Programs-2019 SASTRA UniversitystarNo ratings yet
- SASTRA UNIVRSITY Dbms Semester PapersDocument19 pagesSASTRA UNIVRSITY Dbms Semester PapersstarNo ratings yet
- SASTRA University Basic Civil Engineering Question Papers First YearDocument16 pagesSASTRA University Basic Civil Engineering Question Papers First YearstarNo ratings yet
- CHY101 Engineering Chemistry Revision SASTRA UniversityDocument1 pageCHY101 Engineering Chemistry Revision SASTRA UniversitystarNo ratings yet
- COMPOSITE and Nano Materials SASTRA University 1st YearDocument11 pagesCOMPOSITE and Nano Materials SASTRA University 1st Yearstar100% (1)
- UNIT-III-T. Veerarajan Complex DifferentiationDocument100 pagesUNIT-III-T. Veerarajan Complex Differentiationstar100% (1)
- Short Procedure Engineering Chemistry SASTRA UniversityDocument13 pagesShort Procedure Engineering Chemistry SASTRA UniversitystarNo ratings yet
- JAVA Sample Questions For Practice (II CSE - A' & II IT - B')Document5 pagesJAVA Sample Questions For Practice (II CSE - A' & II IT - B')starNo ratings yet
- UNIT-II SASTRA University Basic Civil EngineeringDocument26 pagesUNIT-II SASTRA University Basic Civil EngineeringstarNo ratings yet
- Unit 1 Chemistry SASTRA University Water TreatmentDocument6 pagesUnit 1 Chemistry SASTRA University Water Treatmentstar100% (1)
- ASSOCIATIVE INTERACTIONS SASTRA University First YearDocument28 pagesASSOCIATIVE INTERACTIONS SASTRA University First Yearstar100% (1)
- SASTRA First Year Physics Question BankDocument10 pagesSASTRA First Year Physics Question Bankstar100% (1)
- Engineering Physics SASTRA Semester Question PapersDocument7 pagesEngineering Physics SASTRA Semester Question PapersstarNo ratings yet
- Mongodb Session 2Document47 pagesMongodb Session 2star100% (1)
- Class 10th Model Question Paper Maths PDFDocument6 pagesClass 10th Model Question Paper Maths PDFXxyyzzNo ratings yet
- Coordinate Geometry of CirclesDocument10 pagesCoordinate Geometry of CirclesHaniyaAngelNo ratings yet
- SSC CHSLE Guide Free Guide WWW - Sscportal.inDocument91 pagesSSC CHSLE Guide Free Guide WWW - Sscportal.inVenkatesanSelvarajanNo ratings yet
- 37 SAT 12 Formula ListDocument4 pages37 SAT 12 Formula ListMohamed SamerNo ratings yet
- Verisurf X - Verisurf ToolsDocument25 pagesVerisurf X - Verisurf ToolsmaniakfarutNo ratings yet
- Lecture On Circular CurvesDocument43 pagesLecture On Circular CurvesAnonymous s6xbqCpvSW100% (2)
- TT44 Fall JASAsydneyDocument2 pagesTT44 Fall JASAsydneyJuni ZoomkuNo ratings yet
- Manual SH 2200H QG (V2.1)Document50 pagesManual SH 2200H QG (V2.1)juventino vazquezNo ratings yet
- Using Charts and Graphs - Jan WhiteDocument220 pagesUsing Charts and Graphs - Jan Whitethaist100% (1)
- Igcse: Equations of CirclesDocument30 pagesIgcse: Equations of CirclesLouie Bridgeman-RivettNo ratings yet
- Mathematics Class 9Document360 pagesMathematics Class 9DeveshNo ratings yet
- Theorems in Plane Geometry Sec2Document11 pagesTheorems in Plane Geometry Sec2AlexandreNo ratings yet
- CBSE Class 10 Maths Sample Paper Solution Set 1Document31 pagesCBSE Class 10 Maths Sample Paper Solution Set 1TEJA SINGHNo ratings yet
- Board Paper 2021Document17 pagesBoard Paper 2021AkshayNo ratings yet
- LUCERO - BEED2 1 - 5E Model Lesson Plan in Mathematics Technology For Teaching and LearningDocument2 pagesLUCERO - BEED2 1 - 5E Model Lesson Plan in Mathematics Technology For Teaching and LearningracelisjeahliemaeNo ratings yet
- Mathematics JAMB SyllabusDocument7 pagesMathematics JAMB SyllabusAdeola MojeedNo ratings yet
- Class 9 Revision WorksheetDocument4 pagesClass 9 Revision WorksheetJunaidaldhiyaNo ratings yet
- Detailed Lesson Plan (DLP) in Mathematics 10 Topic/ Lesson Name Time Allotment Teacher Content StandardsDocument3 pagesDetailed Lesson Plan (DLP) in Mathematics 10 Topic/ Lesson Name Time Allotment Teacher Content StandardsGeneva macahiaNo ratings yet
- Formula Sheet GeometryDocument2 pagesFormula Sheet GeometrysamuthrarajaNo ratings yet
- Module 4Document77 pagesModule 4KAMIKAZINo ratings yet
- HBMT 4103Document68 pagesHBMT 4103Aimy RaisNo ratings yet
- Sipnayan Gmatic M WizDocument106 pagesSipnayan Gmatic M WizhawkeyedailyNo ratings yet
- Study Planner and Test Planner XI (First Step) JEE Main & Advanced 2020-22 (Phase-5) - August'20-February'21 PDFDocument23 pagesStudy Planner and Test Planner XI (First Step) JEE Main & Advanced 2020-22 (Phase-5) - August'20-February'21 PDFBharat GelotNo ratings yet
- QA 2018 SSC CGL Previous Year Question PaperDocument14 pagesQA 2018 SSC CGL Previous Year Question PaperSaerah ParkNo ratings yet
- Circularity ErrorDocument8 pagesCircularity Errorganesh_the_aviatorNo ratings yet
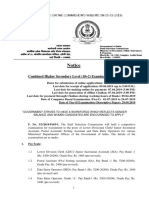
- SSC CHSL 2019 NotificationDocument56 pagesSSC CHSL 2019 NotificationLokesh Gupta100% (3)
- Circumference and Area of CirclesDocument43 pagesCircumference and Area of CirclesmaryroseNo ratings yet
- Circular Measure PDFDocument6 pagesCircular Measure PDFAnna LeeNo ratings yet
- O Level Additional Mathematics 4037 - 11 Paper 1 May - Jun 2021Document7 pagesO Level Additional Mathematics 4037 - 11 Paper 1 May - Jun 2021IffahNo ratings yet