You might also like
- Feed Manual Version 2 3Document40 pagesFeed Manual Version 2 3amelchorNo ratings yet
- WB2500 User ManualDocument84 pagesWB2500 User Manualaurel_c12-1No ratings yet
- Omron DRM21 - W380E107Document293 pagesOmron DRM21 - W380E107sergiofer3239No ratings yet
- 0604JA01EN12 190925 FixDocument1,208 pages0604JA01EN12 190925 Fixjack danialsNo ratings yet
- GFK 1034b Series 90-30 Genius Bus Controller User ManualDocument93 pagesGFK 1034b Series 90-30 Genius Bus Controller User ManualoakalleyNo ratings yet
- G120 Lista de Parametros CU230-2Document668 pagesG120 Lista de Parametros CU230-2Ricky MclaughlinNo ratings yet
- W336 E1 10+CS CJ Series+OperManualDocument829 pagesW336 E1 10+CS CJ Series+OperManualKhoa Nguyen DangNo ratings yet
- Gek 113306CDocument77 pagesGek 113306Cananizisikim100% (1)
- BKSR 3202 R 3210 R 3220Document158 pagesBKSR 3202 R 3210 R 3220Flaviano SaccàNo ratings yet
- Sitrans F M Magflo & Sitrans F C Massflo: Profibus PA Profile 2 Add-On Module For USM II Transmitters FDK:085U0232Document32 pagesSitrans F M Magflo & Sitrans F C Massflo: Profibus PA Profile 2 Add-On Module For USM II Transmitters FDK:085U0232Rodrigo19792016No ratings yet
- Manual Profinet 3HAC031975-001 RevC enDocument72 pagesManual Profinet 3HAC031975-001 RevC enHerminio GómezNo ratings yet
- Service & Support: Migration of MICROMASTER MM440 To SINAMICS G120 (Firmware V4.6)Document43 pagesService & Support: Migration of MICROMASTER MM440 To SINAMICS G120 (Firmware V4.6)Anthony CadilloNo ratings yet
- 2023324-055 A ENG SA CardioSoftDocument118 pages2023324-055 A ENG SA CardioSoftAbdelhakszn SznNo ratings yet
- The H41q and H51q System Families: Programmable SystemsDocument37 pagesThe H41q and H51q System Families: Programmable SystemsObinna Benedict ObiojiNo ratings yet
- LH11 0112 EngDocument782 pagesLH11 0112 Engjarmo401290No ratings yet
- Migration g120 g120-2 enDocument240 pagesMigration g120 g120-2 enAyman Elotaify100% (1)
- W345 E1 5 CJ1 AnalogDocument406 pagesW345 E1 5 CJ1 Analogวรพงษ์ กอชัชวาลNo ratings yet
- PowerFlex Remote I-O Adapter 20 COMM-RDocument122 pagesPowerFlex Remote I-O Adapter 20 COMM-RMario Duarte100% (1)
- 20comm Um004 - en PDocument122 pages20comm Um004 - en PlclsiNo ratings yet
- 3170 MBS User Manual PDFDocument55 pages3170 MBS User Manual PDFnelson contrerasNo ratings yet
- ManualOperacion CompoBusUnits PDFDocument401 pagesManualOperacion CompoBusUnits PDFSergio Eu CaNo ratings yet
- W266 E1 09+CompoBus S+OperManualDocument423 pagesW266 E1 09+CompoBus S+OperManualMiguel_9862No ratings yet
- 900 TC8Document410 pages900 TC8joseNo ratings yet
- 66102EDocument197 pages66102E03sri03No ratings yet
- Technical Communication Omnipcx Enterprise: Date: 13 October 2009Document98 pagesTechnical Communication Omnipcx Enterprise: Date: 13 October 2009locuras34No ratings yet
- TG-0059 - 17 TM4 SUMO HD Ops and Maint GuideDocument62 pagesTG-0059 - 17 TM4 SUMO HD Ops and Maint GuidejalilemadiNo ratings yet
- Fairbanks Fb100Document44 pagesFairbanks Fb100edefrtgNo ratings yet
- Profisafe Su G120CDocument30 pagesProfisafe Su G120CRice CiprianiNo ratings yet
- Modem How To Make OneDocument150 pagesModem How To Make OneAira KrizelleNo ratings yet
- Field Communication Unit: Reference ManualDocument74 pagesField Communication Unit: Reference ManualRobertt StoneNo ratings yet
- peratorls: Downloaded From Manuals Search EngineDocument82 pagesperatorls: Downloaded From Manuals Search EngineLuis Segundo Chuello ChirinosNo ratings yet
- PSM 500Document124 pagesPSM 500clima ahoraNo ratings yet
- Release Notes: DOC-3004-01 Document Revision 07.02.04.02 - B59e9 October 10, 2017Document264 pagesRelease Notes: DOC-3004-01 Document Revision 07.02.04.02 - B59e9 October 10, 2017An AnNo ratings yet
- 9100 BTS Product Description Ed32relDocument67 pages9100 BTS Product Description Ed32relEng Sherif MahmoudNo ratings yet
- 802CIBN0102en PDFDocument142 pages802CIBN0102en PDFTrường Văn NguyễnNo ratings yet
- 20comm Um009 - en PDocument108 pages20comm Um009 - en Pjohnwu_2009No ratings yet
- Manual Modem Datum Psm500Document121 pagesManual Modem Datum Psm500Pablo BarbozaNo ratings yet
- CU240E-2 - Ed2013 PDFDocument820 pagesCU240E-2 - Ed2013 PDFSergio AlbarracinNo ratings yet
- eDXC RTB v4 MDocument115 pageseDXC RTB v4 Mamhtet100% (1)
- W465-E1-05 CS-CJ Ethernet IP Operation ManualDocument464 pagesW465-E1-05 CS-CJ Ethernet IP Operation ManualsisifoefiraNo ratings yet
- Genius IO High Speed Counter User's Manual, GFK-0415EDocument145 pagesGenius IO High Speed Counter User's Manual, GFK-0415EEduardo DiazNo ratings yet
- Fanuc PC FaptDocument198 pagesFanuc PC FaptVincenzo Paternò50% (2)
- CPX FB33Document160 pagesCPX FB33Igor GonçalvesNo ratings yet
- Sinusoidal Commutation With HALL UGDocument34 pagesSinusoidal Commutation With HALL UGVISHNUNo ratings yet
- User Manual: Allen-BradleyDocument152 pagesUser Manual: Allen-BradleykennykufileNo ratings yet
- Apostila CLP Omrom BRDocument671 pagesApostila CLP Omrom BRreinaldopf2011No ratings yet
- 1769 DSI Modbus Comm ModuleDocument204 pages1769 DSI Modbus Comm ModuleThanh BaronNo ratings yet
- Omron CJ - ETN21Document285 pagesOmron CJ - ETN21manmathancellamNo ratings yet
- Tacite: User's GuideDocument128 pagesTacite: User's GuideIra Carolina Bello Patiño100% (1)
- Ig 022 0 en Ewon - Cosy131Document32 pagesIg 022 0 en Ewon - Cosy131handoko pocaNo ratings yet
- Operation Manual: Mimaki Engineering Co., LTDDocument176 pagesOperation Manual: Mimaki Engineering Co., LTDPablo SoberanisNo ratings yet
- Sysmac cs1wscb41v1Document781 pagesSysmac cs1wscb41v1AkhilNo ratings yet
- V062 E1 03 NT31 NT31C Setup ManualDocument299 pagesV062 E1 03 NT31 NT31C Setup ManualAlexander PenadoNo ratings yet
- 13Document59 pages13Hải Nguyễn KhắcNo ratings yet
- 802 Commissioning ManualDocument173 pages802 Commissioning ManualAbhijeet BhagavatulaNo ratings yet
- Deploying QoS for Cisco IP and Next Generation Networks: The Definitive GuideFrom EverandDeploying QoS for Cisco IP and Next Generation Networks: The Definitive GuideRating: 5 out of 5 stars5/5 (2)
- CAN and FPGA Communication Engineering: Implementation of a CAN Bus based Measurement System on an FPGA Development KitFrom EverandCAN and FPGA Communication Engineering: Implementation of a CAN Bus based Measurement System on an FPGA Development KitNo ratings yet
- Advanced PIC Microcontroller Projects in C: From USB to RTOS with the PIC 18F SeriesFrom EverandAdvanced PIC Microcontroller Projects in C: From USB to RTOS with the PIC 18F SeriesRating: 5 out of 5 stars5/5 (1)
- Triple Play: Building the converged network for IP, VoIP and IPTVFrom EverandTriple Play: Building the converged network for IP, VoIP and IPTVNo ratings yet
- Feed Forward LQR Controller Design for Electro Hydraulic ActuatorDocument17 pagesFeed Forward LQR Controller Design for Electro Hydraulic ActuatorVăn Nghĩa NguyễnNo ratings yet
- Industrial AutomationDocument10 pagesIndustrial AutomationVăn Nghĩa NguyễnNo ratings yet
- 2Tue4B Controlo18 Submission 2Document7 pages2Tue4B Controlo18 Submission 2Văn Nghĩa NguyễnNo ratings yet
- A Systematized Approach To Obtain Dependable Controller Specifications For Hybrid PlantsDocument20 pagesA Systematized Approach To Obtain Dependable Controller Specifications For Hybrid PlantsVăn Nghĩa NguyễnNo ratings yet
- Electro-Hydraulic Servo System'sDocument9 pagesElectro-Hydraulic Servo System'smirza kasimNo ratings yet
- Ying Xin, Yao Yao, Ming Liu and Wenyu ZhangDocument9 pagesYing Xin, Yao Yao, Ming Liu and Wenyu ZhangVăn Nghĩa NguyễnNo ratings yet
- Shaymaa Mahmood MahdiDocument11 pagesShaymaa Mahmood MahdiVăn Nghĩa NguyễnNo ratings yet
- Output Feedback Control of Electro-Hydraulic Asymmetric Cylinder System With Disturbances RejectionDocument21 pagesOutput Feedback Control of Electro-Hydraulic Asymmetric Cylinder System With Disturbances RejectionVăn Nghĩa NguyễnNo ratings yet
- Designing Two-Position Controllers for Pole PlacementDocument28 pagesDesigning Two-Position Controllers for Pole PlacementKhethanNo ratings yet
- 2013 - Kim Et Al. - Disturbance-Observer-Based Position Tracking Controller in The Presence of Biased Sinusoidal Disturbance For ElectroDocument9 pages2013 - Kim Et Al. - Disturbance-Observer-Based Position Tracking Controller in The Presence of Biased Sinusoidal Disturbance For ElectroVăn Nghĩa NguyễnNo ratings yet
- Thuật Toán Điều Khiển1Document23 pagesThuật Toán Điều Khiển1Văn Nghĩa NguyễnNo ratings yet
- Designing Two-Position Controllers for Pole PlacementDocument28 pagesDesigning Two-Position Controllers for Pole PlacementKhethanNo ratings yet
- Thuật Toán Điều Khiển1Document23 pagesThuật Toán Điều Khiển1Văn Nghĩa NguyễnNo ratings yet
- Electrohydraulics Basic Level: Textbook TP 601Document275 pagesElectrohydraulics Basic Level: Textbook TP 601Ali AbasiNo ratings yet
- A Novel Servovalve Pilot Stage Actuated by A PiezoDocument24 pagesA Novel Servovalve Pilot Stage Actuated by A PiezoVăn Nghĩa NguyễnNo ratings yet
- Health Assessment For Hydraulic Servo System Using Manifold Learning Based On EMDDocument12 pagesHealth Assessment For Hydraulic Servo System Using Manifold Learning Based On EMDVăn Nghĩa NguyễnNo ratings yet
- Text 4Document1 pageText 4Văn Nghĩa NguyễnNo ratings yet
- Blank DocumentDocument1 pageBlank DocumentVăn Nghĩa NguyễnNo ratings yet
- Simotics GP SD XP DP Catalogue D 81 1 en 2018 PDFDocument576 pagesSimotics GP SD XP DP Catalogue D 81 1 en 2018 PDFAnonymous wbDrYVBcNo ratings yet
- Biến Tần Simen ManualDocument328 pagesBiến Tần Simen ManualVăn Nghĩa NguyễnNo ratings yet
- Siemenscatalogtonghop Lowvoltagemotor 180804112721Document181 pagesSiemenscatalogtonghop Lowvoltagemotor 180804112721Văn Nghĩa NguyễnNo ratings yet
- Blank DocumentDocument1 pageBlank DocumentVăn Nghĩa NguyễnNo ratings yet
- Implementation of Selective Harmonics Elimination For Single Phase Inverter Using Arduino and Simulink MATLAB ModelDocument8 pagesImplementation of Selective Harmonics Elimination For Single Phase Inverter Using Arduino and Simulink MATLAB Modelالذوادي بن الذيبNo ratings yet
- PV Is Entering The AI Era: Special Edition Developed in Partnership With HuaweiDocument44 pagesPV Is Entering The AI Era: Special Edition Developed in Partnership With Huaweimarcoant2287No ratings yet
- Everything You Need to Know About Rekeying Schlage LocksDocument19 pagesEverything You Need to Know About Rekeying Schlage LocksPKMNo ratings yet
- Project DirectionDocument1 pageProject DirectionAnh NguyễnNo ratings yet
- ADE LAB ManualDocument75 pagesADE LAB ManualNITHIN NNo ratings yet
- Thinking ArchitecturallyDocument68 pagesThinking ArchitecturallyJose RojasNo ratings yet
- 3 - SQUARE D Model 6 Motor Control Center Profibus DPDocument4 pages3 - SQUARE D Model 6 Motor Control Center Profibus DPSalvatierra Rojas MoisesNo ratings yet
- Quad Cortex PDFDocument122 pagesQuad Cortex PDFChiara VichiNo ratings yet
- Most Often Needed: Radio DiagramsDocument241 pagesMost Often Needed: Radio DiagramsMARCELO F. MENEGASSONo ratings yet
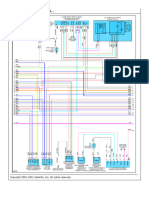
- Engine Controls Hybrid System Circuit D2Document1 pageEngine Controls Hybrid System Circuit D2FranciscoNo ratings yet
- The Project: Book by Robert Grossblatt (ISBN 0830631712) - in My Opinion, This Second Book Is Better BecauseDocument12 pagesThe Project: Book by Robert Grossblatt (ISBN 0830631712) - in My Opinion, This Second Book Is Better Becauseبنیاد پرست100% (1)
- Simulation of SOI PIN Diode for Space Radiation DetectionDocument12 pagesSimulation of SOI PIN Diode for Space Radiation Detectionzuraixoz7967No ratings yet
- Project Synopsis on Software Quality AssuranceDocument11 pagesProject Synopsis on Software Quality AssuranceYajnaseni Neelabh0% (1)
- Koden Promotes Intelligent Foundation Work.: WWW - Koden-Electronics - Co.jpDocument2 pagesKoden Promotes Intelligent Foundation Work.: WWW - Koden-Electronics - Co.jpdennis rio perdana100% (1)
- Service Bulletin: PurposeDocument3 pagesService Bulletin: PurposejussmeeeNo ratings yet
- Airline Reservation System Project Report 1Document32 pagesAirline Reservation System Project Report 1Midhun PaynoorNo ratings yet
- List of PartsDocument7 pagesList of Partsmohammad etemad moghadamNo ratings yet
- BRKARC 2001 Cisco ASR1000 Series Routers System Solution Architectures 2013 Orlando 2 Hours PDFDocument115 pagesBRKARC 2001 Cisco ASR1000 Series Routers System Solution Architectures 2013 Orlando 2 Hours PDFSaptarshi BhattacharjeeNo ratings yet
- Naveen Kumar GDocument2 pagesNaveen Kumar GRajeshkumar PothupalepuNo ratings yet
- WWW Codeguru ComDocument5 pagesWWW Codeguru ComSaurab MehraNo ratings yet
- VTOL MQP 2020 SignedDocument116 pagesVTOL MQP 2020 SignedtfNo ratings yet
- Letter of Motivation Information SystemsDocument1 pageLetter of Motivation Information SystemsMd Raihanul Islam100% (5)
- Week 3 L4 (Design Thinking)Document16 pagesWeek 3 L4 (Design Thinking)buy inviteeNo ratings yet
- Fundamentals of Electrostatic Discharge: Part Six - ESD StandardsDocument16 pagesFundamentals of Electrostatic Discharge: Part Six - ESD StandardssandrasuaNo ratings yet
- The F5 SSL Orchestrator and Palo Alto Networks Next-Gen Firewall SolutionDocument39 pagesThe F5 SSL Orchestrator and Palo Alto Networks Next-Gen Firewall Solutionalways_redNo ratings yet
- HEPI CS How To Kill Your Undercarriage-1Document3 pagesHEPI CS How To Kill Your Undercarriage-1Lord Nafaryus100% (1)
- 8000io CutsheetDocument2 pages8000io CutsheetPadmo PadmundonoNo ratings yet
- LR3 (Eu)Document4 pagesLR3 (Eu)Đăng Điệp NguyễnNo ratings yet
- TE Supplier Portal - Certification Upload Stand Alone Application Training - MAR2020Document6 pagesTE Supplier Portal - Certification Upload Stand Alone Application Training - MAR2020Karthick MNo ratings yet
- Piano Suzuki GP-3 Manual 3521451Document100 pagesPiano Suzuki GP-3 Manual 3521451Andreea PanaitNo ratings yet