You might also like
- Fundamentals of Horizontal Wellbore Cleanout: Theory and Applications of Rotary Jetting TechnologyFrom EverandFundamentals of Horizontal Wellbore Cleanout: Theory and Applications of Rotary Jetting TechnologyNo ratings yet
- Chapter 1-Introduction To Green BuildingsDocument40 pagesChapter 1-Introduction To Green Buildingsniti860No ratings yet
- 2010 IMCO CatalogDocument170 pages2010 IMCO Cataloggeav25653855No ratings yet
- Rising StrongDocument3 pagesRising StrongPatricia CoyNo ratings yet
- The Ow Pattern and Entropy Generation in An Axial Inlet Cyclone With Re Ux Cone and Gaps in The Vortex FinderDocument12 pagesThe Ow Pattern and Entropy Generation in An Axial Inlet Cyclone With Re Ux Cone and Gaps in The Vortex FinderdadNo ratings yet
- En 10305-4Document21 pagesEn 10305-4lorenzinho290100% (1)
- Craig2016.traditions in Communication TheoryDocument10 pagesCraig2016.traditions in Communication TheoryDelia ConstandaNo ratings yet
- Non Imaging Fresnel Lenses Design and Performance of Solar ConcentartorDocument278 pagesNon Imaging Fresnel Lenses Design and Performance of Solar ConcentartorYoya LawiNo ratings yet
- Étude de L'energie Échappée Lors Du SautDocument10 pagesÉtude de L'energie Échappée Lors Du SautneNo ratings yet
- Frictional Properties of Rotary Glyd-Ring Under WaDocument9 pagesFrictional Properties of Rotary Glyd-Ring Under WaScaricatore92No ratings yet
- X16 - Ref - Life Time - Application of Calculation - Pan2018Document12 pagesX16 - Ref - Life Time - Application of Calculation - Pan2018Chanin NgudsuntearNo ratings yet
- Dobreva 2022 IOP Conf. Ser. Mater. Sci. Eng. 1220 012025Document6 pagesDobreva 2022 IOP Conf. Ser. Mater. Sci. Eng. 1220 012025King PipiNo ratings yet
- Tran 2018 IOP Conf. Ser. Earth Environ. Sci. 143 012042Document10 pagesTran 2018 IOP Conf. Ser. Earth Environ. Sci. 143 012042jos luis rodriguez floresNo ratings yet
- 2.ISCA RJMatS 2013 002Document5 pages2.ISCA RJMatS 2013 002balaguru78No ratings yet
- Tan 2021 IOP Conf. Ser. Earth Environ. Sci. 714 032055Document9 pagesTan 2021 IOP Conf. Ser. Earth Environ. Sci. 714 032055rasiganeshNo ratings yet
- Straub 2022 J. Phys. Conf. Ser. 2198 012027Document9 pagesStraub 2022 J. Phys. Conf. Ser. 2198 012027Christian NissenNo ratings yet
- Study Behaviour of Ratchet Mechanism Manufactured With 3D Printing TechnologyDocument9 pagesStudy Behaviour of Ratchet Mechanism Manufactured With 3D Printing TechnologyMohamadhosein KhademNo ratings yet
- Yonezawa 2022 J. Phys. Conf. Ser. 2217 012059Document13 pagesYonezawa 2022 J. Phys. Conf. Ser. 2217 012059Atmesh PoudyalNo ratings yet
- Gao2019 1Document9 pagesGao2019 1Carlos Eduardo Simoes de AlmeidaNo ratings yet
- Cavitation Erosion of The Damping Piston in Double Damping System of Hydraulic Rock Drill and Its Influencing FactorsDocument14 pagesCavitation Erosion of The Damping Piston in Double Damping System of Hydraulic Rock Drill and Its Influencing FactorsDavies EmmanuelNo ratings yet
- Romanovych - 2019 - IOP - Determination of Parameters of Cable Drums of Capstan WinchesDocument9 pagesRomanovych - 2019 - IOP - Determination of Parameters of Cable Drums of Capstan Winchesgoooga299No ratings yet
- 2021 - Dynamic Numerical Simulation Analysis of A Large Caliber PDFDocument7 pages2021 - Dynamic Numerical Simulation Analysis of A Large Caliber PDFzebrazerozeroNo ratings yet
- SI 2015 For LUPINDocument23 pagesSI 2015 For LUPINr_saniosNo ratings yet
- 2008 Fatigue Performance of Pre-Strained Pipes With Girth Weld DefectsDocument12 pages2008 Fatigue Performance of Pre-Strained Pipes With Girth Weld DefectsotaviopntNo ratings yet
- Kim 2015 IOP Conf. Ser. Mater. Sci. Eng. 72 042044 PDFDocument8 pagesKim 2015 IOP Conf. Ser. Mater. Sci. Eng. 72 042044 PDFHema KumarNo ratings yet
- Effect of Partial Shear Interaction in SteelDocument8 pagesEffect of Partial Shear Interaction in SteelAzzam NahdiNo ratings yet
- Failure Analysis of A Two High Gearbox ShaftDocument10 pagesFailure Analysis of A Two High Gearbox ShaftNguyễnVănLăngNo ratings yet
- IOP Conference Series: Materials Science and Engineering - General aspects of speed increaser gearboxesDocument10 pagesIOP Conference Series: Materials Science and Engineering - General aspects of speed increaser gearboxesRahul AgnihotriNo ratings yet
- A Novel Method of Twist Drill Fluting Fulfilling Required Web Thickness and Rake AngleDocument11 pagesA Novel Method of Twist Drill Fluting Fulfilling Required Web Thickness and Rake Anglefileuse.fNo ratings yet
- Simulation and Research of One-Way Valve Piston Pump Based On AmesimDocument5 pagesSimulation and Research of One-Way Valve Piston Pump Based On AmesimFrancesca CoattiNo ratings yet
- Wu 2018 IOP Conf. Ser. Earth Environ. Sci. 189 022017Document8 pagesWu 2018 IOP Conf. Ser. Earth Environ. Sci. 189 022017Arles SintiawanNo ratings yet
- Contact Stresses Associated With The Wedge-Lock MeDocument13 pagesContact Stresses Associated With The Wedge-Lock MeradityaakNo ratings yet
- Behaviors of Supersonic Double-Parameter Jets and Their Impigement Onto Molten Bath in BOF SteelmakingDocument12 pagesBehaviors of Supersonic Double-Parameter Jets and Their Impigement Onto Molten Bath in BOF SteelmakingGabriel MáximoNo ratings yet
- Honkalas_2021_J._Phys.__Conf._Ser._1969_012023Document19 pagesHonkalas_2021_J._Phys.__Conf._Ser._1969_012023Meda RajeshNo ratings yet
- Application of Small-Scale Wind Power System in Livestock BuildingsDocument10 pagesApplication of Small-Scale Wind Power System in Livestock BuildingsAdrian PopaNo ratings yet
- Design and Control of Hybrid Underwater GliderDocument9 pagesDesign and Control of Hybrid Underwater GliderAnh NgoNo ratings yet
- Designing and FEM simulation of the helicopter rotor and hubDocument11 pagesDesigning and FEM simulation of the helicopter rotor and hubAlper DedeNo ratings yet
- Radial Metal SealDocument16 pagesRadial Metal Sealansysuser2023No ratings yet
- Numerical Simulation of The Working Process in The Twin Screw Vacuum PumpDocument11 pagesNumerical Simulation of The Working Process in The Twin Screw Vacuum PumprezaNo ratings yet
- Numerical Investigation of Bend and Torus Flows, Part I Effect of Swirl Motion On Flow Structure in U-BendDocument14 pagesNumerical Investigation of Bend and Torus Flows, Part I Effect of Swirl Motion On Flow Structure in U-BendSami ur RehmanNo ratings yet
- The-Wind-structure-Interaction-Analysis-and-Optimization-of-_2015_Energy-ProDocument7 pagesThe-Wind-structure-Interaction-Analysis-and-Optimization-of-_2015_Energy-Propaween saetaeNo ratings yet
- A_Review_on_Design_and_Efficiency_Improvement_of_WDocument19 pagesA_Review_on_Design_and_Efficiency_Improvement_of_WMeda RajeshNo ratings yet
- Kumashiro 2019 IOP Conf. Ser. Earth Environ. Sci. 240 072006Document10 pagesKumashiro 2019 IOP Conf. Ser. Earth Environ. Sci. 240 072006emerson william vidalNo ratings yet
- Laboratory Tests of Operational Durability and Energy - Efficiency of Conveyor BeltsDocument12 pagesLaboratory Tests of Operational Durability and Energy - Efficiency of Conveyor BeltsJordan YembangNo ratings yet
- Blade Erato Blue OrıgınDocument14 pagesBlade Erato Blue OrıgınaircarmediaNo ratings yet
- Study Behaviour of Ratchet Mechanism ManufacturedDocument9 pagesStudy Behaviour of Ratchet Mechanism ManufacturedLorenzo ToccaceliNo ratings yet
- Design Study and Full Scale MBS-CFD Simulation ofDocument10 pagesDesign Study and Full Scale MBS-CFD Simulation ofm1565778302No ratings yet
- Improvement of Flow Behavior in The Spiral Casing of Francis Hydro Turbine Model by Shape OptimizationDocument10 pagesImprovement of Flow Behavior in The Spiral Casing of Francis Hydro Turbine Model by Shape OptimizationDragon NestNo ratings yet
- Effect of Flow Field On Particle Erosion in Eroded Square ElbowsDocument8 pagesEffect of Flow Field On Particle Erosion in Eroded Square ElbowsrifatNo ratings yet
- IOP Conference Series: Materials Science and Engineering Explosive Bolt Separation Dynamics StudyDocument7 pagesIOP Conference Series: Materials Science and Engineering Explosive Bolt Separation Dynamics StudyHassan HabibNo ratings yet
- New Mass-Transfer Correlations for Packed TowersDocument22 pagesNew Mass-Transfer Correlations for Packed Towerstuti tutuarimaNo ratings yet
- Khakpour 2014 IOP Conf. Ser.: Earth Environ. Sci. 22 052016Document11 pagesKhakpour 2014 IOP Conf. Ser.: Earth Environ. Sci. 22 052016Sexy IdolNo ratings yet
- JETIR1906R84Document10 pagesJETIR1906R84Vignesan MechNo ratings yet
- Dynamic Analysis of An Extradosed Bridge: International Journal of Advance Engineering and Research DevelopmentDocument6 pagesDynamic Analysis of An Extradosed Bridge: International Journal of Advance Engineering and Research DevelopmentJebin SebastianNo ratings yet
- Vibration Analysis For Large-Scale Wind Turbine Blade Bearing Fault Detection With An Empirical Wavelet Thresholding MethodDocument24 pagesVibration Analysis For Large-Scale Wind Turbine Blade Bearing Fault Detection With An Empirical Wavelet Thresholding MethodAkash RockNo ratings yet
- (Original) Cui Et. Al., 2022Document8 pages(Original) Cui Et. Al., 2022Carolina CamposNo ratings yet
- Lai 2013 IOP Conf. Ser.: Mater. Sci. Eng. 52 022015 PDFDocument6 pagesLai 2013 IOP Conf. Ser.: Mater. Sci. Eng. 52 022015 PDFSujiNo ratings yet
- IJRET20160503017Document6 pagesIJRET20160503017MECHANICAL SHORTS Gate Technical ExamNo ratings yet
- Zaludek 2020 IOP Conf. Ser. Mater. Sci. Eng. 726 012016Document8 pagesZaludek 2020 IOP Conf. Ser. Mater. Sci. Eng. 726 012016Salagrama AbhinavNo ratings yet
- Hydrodynamically Stable Towed Transmitter BodyDocument9 pagesHydrodynamically Stable Towed Transmitter BodyManoj T IssacNo ratings yet
- 1.a Novel Comprehensive Model of Wet Clutch During The Engagement ProcessDocument7 pages1.a Novel Comprehensive Model of Wet Clutch During The Engagement ProcessSina ShourakiNo ratings yet
- Spe 209716 MsDocument20 pagesSpe 209716 MsDiego PalaciosNo ratings yet
- Dellinger 2016 IOP Conf. Ser. Earth Environ. Sci. 49 102002Document11 pagesDellinger 2016 IOP Conf. Ser. Earth Environ. Sci. 49 102002Milagros Alejandra Aragón DimasNo ratings yet
- He_2021_IOP_Conf._Ser.__Mater._Sci._Eng._1043_022015Document12 pagesHe_2021_IOP_Conf._Ser.__Mater._Sci._Eng._1043_0220151711076053No ratings yet
- Prudhommeal2018 PDFDocument20 pagesPrudhommeal2018 PDFKaushik RokkamNo ratings yet
- Wan 2021 IOP Conf. Ser. Earth Environ. Sci. 651 032077Document13 pagesWan 2021 IOP Conf. Ser. Earth Environ. Sci. 651 032077shiva rajNo ratings yet
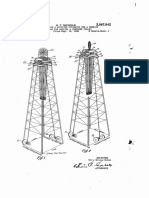
- April 27, 1948. E. A. Bender 2,440,427: Filed Jan. 12, 1945 2 Sheets-SheetDocument6 pagesApril 27, 1948. E. A. Bender 2,440,427: Filed Jan. 12, 1945 2 Sheets-SheetAbu SayedNo ratings yet
- US2067942ADocument33 pagesUS2067942AAbu SayedNo ratings yet
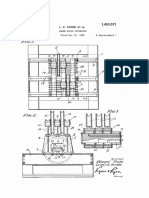
- 3rventer: Filed Dec. 31, 1923 2. Sheets-Sheet LDocument5 pages3rventer: Filed Dec. 31, 1923 2. Sheets-Sheet LAbu SayedNo ratings yet
- Finite Element Analysis and Calculation of HTC15J01 Petrochemical Industry Crane Pulley DesignDocument6 pagesFinite Element Analysis and Calculation of HTC15J01 Petrochemical Industry Crane Pulley DesignFrancisco Raro AlmuzaraNo ratings yet
- Study On The Control Strategies of Offshore DrilliDocument13 pagesStudy On The Control Strategies of Offshore DrilliAbu SayedNo ratings yet
- 题 目 Optimization design of crown block structure in hoisting system of petroleum drilling rigDocument12 pages题 目 Optimization design of crown block structure in hoisting system of petroleum drilling rigAbu SayedNo ratings yet
- Design and Implementation of Crown-Block Heave Compensation Experimental Device - S Control SystemDocument5 pagesDesign and Implementation of Crown-Block Heave Compensation Experimental Device - S Control SystemAbu SayedNo ratings yet
- VI. 07. Synchronous Machine PDFDocument16 pagesVI. 07. Synchronous Machine PDFDesi HertianiNo ratings yet
- Inside Earth's LayersDocument2 pagesInside Earth's Layersansh parasharNo ratings yet
- კემპბელი თ16 353 363 დნმ და რეპლიკაციაDocument11 pagesკემპბელი თ16 353 363 დნმ და რეპლიკაციაSosoNo ratings yet
- Selection and Characterisation of The Predominant Lactobacillus Species As A Starter Culture in The Preparation of Kocho, Fermented Food From EnsetDocument12 pagesSelection and Characterisation of The Predominant Lactobacillus Species As A Starter Culture in The Preparation of Kocho, Fermented Food From EnsetHelen WeldemichaelNo ratings yet
- HERRAMIENTA DE LLENADO - AutoFill PDFDocument15 pagesHERRAMIENTA DE LLENADO - AutoFill PDFluis alberto franco rodriguezNo ratings yet
- From The Conventional Total Station To The Prospective Image Assisted Photogrammetric Scanning Total Station: Comprehensive ReviewDocument7 pagesFrom The Conventional Total Station To The Prospective Image Assisted Photogrammetric Scanning Total Station: Comprehensive ReviewLeroy Lionel SonfackNo ratings yet
- ASCO Switch CatalogDocument38 pagesASCO Switch Catalogjohnnie0% (1)
- 09 - Validation of Diagnostic Markers For Streak Virus Disease Resistance in MaizeDocument11 pages09 - Validation of Diagnostic Markers For Streak Virus Disease Resistance in MaizeNemanja NišavićNo ratings yet
- ARTIKEL - Baby Talk Hinders LearningDocument2 pagesARTIKEL - Baby Talk Hinders LearningZ E V A N Y ANo ratings yet
- What Is Agile and Why Do I Care? Blacks in Technology 2018Document44 pagesWhat Is Agile and Why Do I Care? Blacks in Technology 2018AlexJB100% (2)
- Humour and IdentityDocument12 pagesHumour and IdentityLyann MartinezNo ratings yet
- Departmental Schedule, 2nd Sem 2017-2018Document70 pagesDepartmental Schedule, 2nd Sem 2017-2018Kim Kenneth Roca100% (3)
- Graderroadmotori 019931 MBPDocument97 pagesGraderroadmotori 019931 MBPblarkins1No ratings yet
- Chap 008Document69 pagesChap 008jjseven22100% (1)
- The 5 Stages of the Design ProcessDocument5 pagesThe 5 Stages of the Design ProcessDacia BarrettNo ratings yet
- Sample Securitiser: Pressure Facility Re-InventedDocument4 pagesSample Securitiser: Pressure Facility Re-InventedMiguelNo ratings yet
- Lord Dyrron Baratheon, Warden of the StormlandsDocument2 pagesLord Dyrron Baratheon, Warden of the StormlandsDaniel AthertonNo ratings yet
- CCR Control System Interface Handbook - 6jun2012Document17 pagesCCR Control System Interface Handbook - 6jun2012Tomuta StefanNo ratings yet
- 2008 Leonardoda Vinci AReviewDocument15 pages2008 Leonardoda Vinci AReviewOkeyman XlapatsasNo ratings yet
- Linking Excel Data Into Navisworks - Part 5 Wrapping Up - RVITDocument2 pagesLinking Excel Data Into Navisworks - Part 5 Wrapping Up - RVITGreciaGuevaraNo ratings yet
- Iso 1615 1976Document4 pagesIso 1615 1976Untung HariminNo ratings yet
- 10 819 Astro Express LF Valve IODocument2 pages10 819 Astro Express LF Valve IOHary FadlyNo ratings yet
- Chapter 3 PPTDocument41 pagesChapter 3 PPTidNo ratings yet
- Colonial Philippines in Transition - SEA StudiesDocument197 pagesColonial Philippines in Transition - SEA StudiesYong Mosqueda100% (1)