You might also like
- Optimization ModelsDocument627 pagesOptimization ModelsBINGI ADITHYANo ratings yet
- Homework2 PDFDocument2 pagesHomework2 PDFRobin Robertson100% (1)
- Structural Dynamics - ExampleDocument3 pagesStructural Dynamics - ExampleJaleel ClaasenNo ratings yet
- Matlab Code Stress - StrainDocument7 pagesMatlab Code Stress - Straindeathjester1No ratings yet
- The New Guide To Stability Design Criteria For Metal StructuresDocument3 pagesThe New Guide To Stability Design Criteria For Metal StructuresBilly BobNo ratings yet
- Mechanics of Building Materials ABAQUS UMAT ImplementationDocument27 pagesMechanics of Building Materials ABAQUS UMAT Implementationapu100% (1)
- Assignment 15 For Mastering PhysicsDocument15 pagesAssignment 15 For Mastering PhysicsPianoDude4U50% (2)
- 8 Nodes HexadronDocument21 pages8 Nodes HexadronMario Raul FreitasNo ratings yet
- OpenSees Workshop04Document52 pagesOpenSees Workshop04james_frankNo ratings yet
- Solid Element Formulation OverviewDocument36 pagesSolid Element Formulation OverviewasdqwexNo ratings yet
- (Felippa) Solution of Linear Equations With Skyline-Stored Symmetric MatrixDocument17 pages(Felippa) Solution of Linear Equations With Skyline-Stored Symmetric Matrixjuan carlos molano toroNo ratings yet
- 3340 Lectures 7 To 12 S1 2015Document61 pages3340 Lectures 7 To 12 S1 2015utsav_koshtiNo ratings yet
- 5.deflections Using Energy Methods PDFDocument47 pages5.deflections Using Energy Methods PDFking burgosNo ratings yet
- The Yield-Line Method For Concrete Slabs: Automated at LastDocument11 pagesThe Yield-Line Method For Concrete Slabs: Automated at LastMudassar KhanNo ratings yet
- Ch18 Hexaedron ElementDocument10 pagesCh18 Hexaedron Elementlittle-wing100% (2)
- ArcelorMittal Cofrastra 70 Brochure enDocument12 pagesArcelorMittal Cofrastra 70 Brochure enNedesca BogdanNo ratings yet
- Stiffness MatrixDocument25 pagesStiffness MatrixAmanda Campos50% (2)
- Steel Material ModelsDocument8 pagesSteel Material ModelspirazorNo ratings yet
- Timoshenko CoefficientDocument6 pagesTimoshenko CoefficientwarterflyNo ratings yet
- 3-D Finite Element Modeling in OpenSees For Bridge - Scoggins - ThesisDocument54 pages3-D Finite Element Modeling in OpenSees For Bridge - Scoggins - Thesisantonfreid100% (2)
- Theory of Elasticity and PlasticityDocument2 pagesTheory of Elasticity and PlasticityNaren GujjarNo ratings yet
- Vibration LooseningDocument24 pagesVibration LooseningAmir Moradi100% (1)
- 4.4.1 Equivalent Loading On Beam Member: Q N W XDXDocument9 pages4.4.1 Equivalent Loading On Beam Member: Q N W XDXsrinadh1602No ratings yet
- SteelDesign LTB Fu NewDocument36 pagesSteelDesign LTB Fu NewAnonymous UibQYvc6No ratings yet
- Finite Strip MethodDocument23 pagesFinite Strip MethodNirav SoniNo ratings yet
- Finit Element Analysis MatlabDocument3 pagesFinit Element Analysis MatlabAntehun MekonnenNo ratings yet
- A New Codified Design Theory of Second-Order Direct Analysis For Steel A...Document7 pagesA New Codified Design Theory of Second-Order Direct Analysis For Steel A...Luis MartinsNo ratings yet
- Eres17 Usb PapersDocument275 pagesEres17 Usb Paperschachichach2No ratings yet
- Westergaard FormulaDocument7 pagesWestergaard FormulashenNo ratings yet
- Homework4 PDFDocument2 pagesHomework4 PDFRodolfo Angel Carrillo VelasquezNo ratings yet
- Sigrist, Hackbarth 3rd Fib International Congress - 2010Document10 pagesSigrist, Hackbarth 3rd Fib International Congress - 2010mocker1987No ratings yet
- FE-analysis of Vårby Bridge: Robert Bengtsson Mikael WidénDocument79 pagesFE-analysis of Vårby Bridge: Robert Bengtsson Mikael Widénamirarshad91No ratings yet
- Modal Maths Issue 3Document19 pagesModal Maths Issue 3KemoHNo ratings yet
- AAA - M. Pignataro, N. Rizzi and A. Luongo Auth. Stability, Bifurcation and Postcritical Behaviour of Elastic Structures 1991 PDFDocument362 pagesAAA - M. Pignataro, N. Rizzi and A. Luongo Auth. Stability, Bifurcation and Postcritical Behaviour of Elastic Structures 1991 PDFLuisFernandoMendietaElenaNo ratings yet
- Co-Rotational Beam Elements, Battini JM PDFDocument196 pagesCo-Rotational Beam Elements, Battini JM PDFDaniele Di LucaNo ratings yet
- Nonlinear Modeling of RC Structures Using Opensees: University of Naples Federico IiDocument171 pagesNonlinear Modeling of RC Structures Using Opensees: University of Naples Federico IiJorge Luis Garcia ZuñigaNo ratings yet
- Stability of Structures FE-based Stability AnalysisDocument40 pagesStability of Structures FE-based Stability AnalysisEsmar Cantu NetoNo ratings yet
- Boundary Value Problems in Linear ElasticityDocument39 pagesBoundary Value Problems in Linear Elasticity박남수No ratings yet
- Analysis and Comparison On Dynamic Characteristics of The BridgeDocument10 pagesAnalysis and Comparison On Dynamic Characteristics of The BridgejayaramanrathnamNo ratings yet
- An Introduction To Matrix Structural Analysis and Finite Element MethodsDocument8 pagesAn Introduction To Matrix Structural Analysis and Finite Element MethodsAziz AljurfNo ratings yet
- CE220 Reader For 2009Document677 pagesCE220 Reader For 2009gabrielfc19100% (1)
- 7 - SDOF - General SDOF SystemsDocument18 pages7 - SDOF - General SDOF Systemskhurram864No ratings yet
- 3 Michael Salmon Seismic Ysis of Safety-Related Nuclear Structures Tuesday 18 2016 5B1 5DDocument14 pages3 Michael Salmon Seismic Ysis of Safety-Related Nuclear Structures Tuesday 18 2016 5B1 5Dpezhmankhan100% (1)
- Chapter 6 Composite BeamsDocument10 pagesChapter 6 Composite BeamsDem Austria EspinoNo ratings yet
- L6 - Numerical Evaluation of Dynamic ResponseDocument41 pagesL6 - Numerical Evaluation of Dynamic ResponseRobinson IdarragaNo ratings yet
- FEM Analysis and Mxy Moments in Concrete DesignDocument4 pagesFEM Analysis and Mxy Moments in Concrete DesignMarekNo ratings yet
- Theory of Elasticity & Plasticity PDFDocument17 pagesTheory of Elasticity & Plasticity PDFSounak SasmalNo ratings yet
- Continous One Way Slabs With MathCadDocument18 pagesContinous One Way Slabs With MathCadGiomar OzaitaNo ratings yet
- Bending of Plates - Wikipedia, The Free EncyclopediaDocument11 pagesBending of Plates - Wikipedia, The Free Encyclopediadidodido_67No ratings yet
- Computational Fracture MechanicsDocument58 pagesComputational Fracture MechanicsSanjay SinghNo ratings yet
- Documents - MX Computer Program For Determination of Geometrical Properties of Thin Walled 577b0326dd543Document11 pagesDocuments - MX Computer Program For Determination of Geometrical Properties of Thin Walled 577b0326dd543Marcelo Gimenez MagalhãesNo ratings yet
- Moving-Load Dynamic Problems A Tutorial (With A Brief Overview)Document22 pagesMoving-Load Dynamic Problems A Tutorial (With A Brief Overview)rkp17No ratings yet
- 4 Node QuadDocument27 pages4 Node QuadMathiew EstephoNo ratings yet
- MAURER Elastomeric BearingsDocument2 pagesMAURER Elastomeric Bearingsabdelrahman emadNo ratings yet
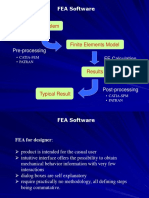
- Process in FEA SoftwareDocument16 pagesProcess in FEA SoftwareMbok Darmi100% (1)
- 10 Viscoelasticity 04 Hereditaory PDFDocument12 pages10 Viscoelasticity 04 Hereditaory PDFletter_ashish4444No ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- Structural Analysis Systems: Software — Hardware Capability — Compatibility — ApplicationsFrom EverandStructural Analysis Systems: Software — Hardware Capability — Compatibility — ApplicationsRating: 5 out of 5 stars5/5 (1)
- Nonlinear Finite Element Analysis and Adina: Proceedings of the 4th ADINA ConferenceFrom EverandNonlinear Finite Element Analysis and Adina: Proceedings of the 4th ADINA ConferenceNo ratings yet
- Modern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989From EverandModern Practice in Stress and Vibration Analysis: Proceedings of the Conference Held at the University of Liverpool, 3–5 April 1989J. E. MottersheadNo ratings yet
- Kom Lecture NotesDocument163 pagesKom Lecture NotesgvnagamaniNo ratings yet
- MCQ's Question Bank /topic Learning Outcomes Page 1of 20Document20 pagesMCQ's Question Bank /topic Learning Outcomes Page 1of 20gvnagamaniNo ratings yet
- Velocity and AccelerationDocument12 pagesVelocity and AccelerationgvnagamaniNo ratings yet
- Objective Bits of Dmm-I of All UnitsDocument17 pagesObjective Bits of Dmm-I of All UnitsgvnagamaniNo ratings yet
- HT ProblemsDocument26 pagesHT ProblemsgvnagamaniNo ratings yet
- Jntuworld: Code: 9A03703 Finite Element MethodsDocument8 pagesJntuworld: Code: 9A03703 Finite Element MethodsgvnagamaniNo ratings yet
- Kom Unit IIIDocument14 pagesKom Unit IIIgvnagamaniNo ratings yet
- Part I PDFDocument14 pagesPart I PDFgvnagamaniNo ratings yet
- Global College of Engg. & Technology: Organized byDocument2 pagesGlobal College of Engg. & Technology: Organized bygvnagamaniNo ratings yet
- Automotive Transmission: Be Skilled Be SmartDocument55 pagesAutomotive Transmission: Be Skilled Be SmartgvnagamaniNo ratings yet
- Engineering Mathematics Past QuestionsDocument23 pagesEngineering Mathematics Past QuestionsHimal Timsina100% (1)
- Convex Hull NotesDocument15 pagesConvex Hull NotesFarooq ArifNo ratings yet
- 4.4.3 Geometrical Significance of Newton-Raphson Method: X F X XDocument6 pages4.4.3 Geometrical Significance of Newton-Raphson Method: X F X XGoura Sundar TripathyNo ratings yet
- Lesson 4,5 & 6Document5 pagesLesson 4,5 & 6zyx xyzNo ratings yet
- Calculation of The Eigenvectors of A Symmetric Tridiagonal Matrix by Inverse IterationDocument9 pagesCalculation of The Eigenvectors of A Symmetric Tridiagonal Matrix by Inverse Iterationagbas20026896No ratings yet
- Delhi Public School, Bangalore North: 1 - GraphDocument4 pagesDelhi Public School, Bangalore North: 1 - GraphVijay KumarNo ratings yet
- Ateneo de Zamboanga University: D. Logarithmic FunctionDocument3 pagesAteneo de Zamboanga University: D. Logarithmic FunctiongiaaannebayanNo ratings yet
- Triple Integration ExercisesDocument2 pagesTriple Integration ExercisesChristine JoyNo ratings yet
- Maths HarvardDocument120 pagesMaths Harvardpremnath.sNo ratings yet
- Binomial Theorem, Exponential & Logarithmic Series-249 PDFDocument8 pagesBinomial Theorem, Exponential & Logarithmic Series-249 PDFSuravi Kusuma PradhanNo ratings yet
- Solutions Manual Physics of Vibrations and WavesDocument179 pagesSolutions Manual Physics of Vibrations and WavesSofía MartinezNo ratings yet
- 10 Partial Di Erential Equations and Fourier MethodsDocument11 pages10 Partial Di Erential Equations and Fourier MethodsNico PriestNo ratings yet
- MGT ScienceDocument83 pagesMGT ScienceKyla Renz de LeonNo ratings yet
- Chapter 2 Giai TichDocument30 pagesChapter 2 Giai TichNAM HOÀNG ĐẠINo ratings yet
- Lab 1: DTFT, DFT, and DFT Spectral Analysis: (LABE 410) Dr. Jad Abou ChaayaDocument4 pagesLab 1: DTFT, DFT, and DFT Spectral Analysis: (LABE 410) Dr. Jad Abou ChaayaJane MoujaessNo ratings yet
- All LecturesDocument53 pagesAll LecturesKevin AlexanderNo ratings yet
- Poisson DistributionDocument2 pagesPoisson DistributionMicheal CooperNo ratings yet
- Question Bank-Finite Element Analysis: Department of Mechanical EngineeringDocument16 pagesQuestion Bank-Finite Element Analysis: Department of Mechanical Engineeringgauravkumar bhandariNo ratings yet
- UW Math 308 NotesDocument172 pagesUW Math 308 NotesLi DuNo ratings yet
- 6 Linear Relations BLM Extra Practice Sheets Answer KeysDocument2 pages6 Linear Relations BLM Extra Practice Sheets Answer Keysapi-349184429No ratings yet
- MITRES2 002S10 Nonlinear TocDocument3 pagesMITRES2 002S10 Nonlinear TocJorge Luis Garcia ZuñigaNo ratings yet
- DE Lecture 3 New HandoutDocument36 pagesDE Lecture 3 New HandoutBarrett M82No ratings yet
- MATH 1201-01 03 February - 09 February Discussion Forum Unit 2Document5 pagesMATH 1201-01 03 February - 09 February Discussion Forum Unit 2James HingaNo ratings yet
- PartsDocument4 pagesPartsPrince QueenoNo ratings yet
- A Theory of Latticed Plates and Shells PDFDocument320 pagesA Theory of Latticed Plates and Shells PDFAnonymous 9IbJK5jhVNNo ratings yet
- Genesis Crash Course JSTSE (2018 19) - Phase 1 - MathematicsDocument55 pagesGenesis Crash Course JSTSE (2018 19) - Phase 1 - MathematicsVinod AgrawalNo ratings yet
- CL 701: Computational Methods For Chemical Engineering ODE-IVP and F (X) 0: Exercise ProblemsDocument6 pagesCL 701: Computational Methods For Chemical Engineering ODE-IVP and F (X) 0: Exercise ProblemschandrahasNo ratings yet
- Maneuvering and Control of Marine VehiclesDocument152 pagesManeuvering and Control of Marine VehiclesKalipada SenNo ratings yet