You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- 1912102-Tower of Necromancy-PFDocument9 pages1912102-Tower of Necromancy-PFAnna AbcxyzNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Can People Change? - Bradford and HuckabayDocument4 pagesCan People Change? - Bradford and HuckabaysiriNo ratings yet
- Historical Development Summary of Automatic Cannon Caliber Ammunition 20-30mm by Dale DavisDocument215 pagesHistorical Development Summary of Automatic Cannon Caliber Ammunition 20-30mm by Dale DavisAmmoResearchNo ratings yet
- 2 CS1SE16 Agile Software DevelopmentDocument3 pages2 CS1SE16 Agile Software DevelopmentAnna AbcxyzNo ratings yet
- DDEP10-02 Administrative GuidanceDocument5 pagesDDEP10-02 Administrative GuidanceAnna AbcxyzNo ratings yet
- 1 CS1SE16 IntroductionDocument2 pages1 CS1SE16 IntroductionAnna AbcxyzNo ratings yet
- 2 CS1PR16 Introduction To CDocument2 pages2 CS1PR16 Introduction To CAnna AbcxyzNo ratings yet
- 10 CS1FC16 Exploiting Memory StructuresDocument4 pages10 CS1FC16 Exploiting Memory StructuresAnna AbcxyzNo ratings yet
- 13 CS1FC16 AccuracyDocument6 pages13 CS1FC16 AccuracyAnna AbcxyzNo ratings yet
- 5 CS1SE16 Project ManagementDocument5 pages5 CS1SE16 Project ManagementAnna AbcxyzNo ratings yet
- 2 CS1FC16 Information RepresentationDocument4 pages2 CS1FC16 Information RepresentationAnna AbcxyzNo ratings yet
- 11 CS1AC16 BiometricsDocument10 pages11 CS1AC16 BiometricsAnna AbcxyzNo ratings yet
- 8 CS1FC16 AlgorithmsDocument7 pages8 CS1FC16 AlgorithmsAnna AbcxyzNo ratings yet
- 4 CS1FC16 Operating SystemDocument5 pages4 CS1FC16 Operating SystemAnna AbcxyzNo ratings yet
- 5 CS1FC16 Computer NetworksDocument6 pages5 CS1FC16 Computer NetworksAnna AbcxyzNo ratings yet
- 3 CS1FC16 Data ManipulationDocument5 pages3 CS1FC16 Data ManipulationAnna AbcxyzNo ratings yet
- 14 CS1AC16 Deep LearningDocument3 pages14 CS1AC16 Deep LearningAnna AbcxyzNo ratings yet
- 1 CS1FC16 Introduction To Computer SystemsDocument3 pages1 CS1FC16 Introduction To Computer SystemsAnna AbcxyzNo ratings yet
- 12 CS1AC16 Detection and TrackingDocument4 pages12 CS1AC16 Detection and TrackingAnna AbcxyzNo ratings yet
- 4 CS1AC16 Problem Solving and Knowledge RepresentationDocument3 pages4 CS1AC16 Problem Solving and Knowledge RepresentationAnna AbcxyzNo ratings yet
- 10 CS1AC16 Artificial Intelligence SummaryDocument3 pages10 CS1AC16 Artificial Intelligence SummaryAnna AbcxyzNo ratings yet
- 7 CS1AC16 Simple Neural NetworkDocument3 pages7 CS1AC16 Simple Neural NetworkAnna AbcxyzNo ratings yet
- 3 CS1AC16 Symbolic AIDocument3 pages3 CS1AC16 Symbolic AIAnna AbcxyzNo ratings yet
- IDS CatalogueDocument29 pagesIDS CataloguebadurallyNo ratings yet
- Debug 1214Document3 pagesDebug 1214RedyNo ratings yet
- Educational Leadership Management - Exam - July 2017Document1 pageEducational Leadership Management - Exam - July 2017Mazuba MutintaNo ratings yet
- Drogueria Caroni Be, C.A. INVENTARIO AL14/03/2022 Descripción Departamento Marca Existencia Precio 1 Bs. Pedido Total BsDocument5 pagesDrogueria Caroni Be, C.A. INVENTARIO AL14/03/2022 Descripción Departamento Marca Existencia Precio 1 Bs. Pedido Total BsEliana AnguloNo ratings yet
- 53206-mt - Computational Fluid DynamicsDocument2 pages53206-mt - Computational Fluid DynamicsSRINIVASA RAO GANTANo ratings yet
- Technical Report Format (MID SEMESTER 2021)Document13 pagesTechnical Report Format (MID SEMESTER 2021)Jay ParmaniNo ratings yet
- COMP2121: Microprocessors and Interfacing: Lecture 25: Serial Input/Output (II)Document10 pagesCOMP2121: Microprocessors and Interfacing: Lecture 25: Serial Input/Output (II)SebaNo ratings yet
- Parts of An Email: Business Email Writing Cheat SheetDocument14 pagesParts of An Email: Business Email Writing Cheat Sheetluluzera100% (1)
- Wallstreetjournal 20171107 TheWallStreetJournalDocument34 pagesWallstreetjournal 20171107 TheWallStreetJournalsadaq84No ratings yet
- Direct Recruitment of Assistant Professors in Tamil Nadu Collegiate Educational Service For Govt. Arts & Science COLLEGES - 2012Document18 pagesDirect Recruitment of Assistant Professors in Tamil Nadu Collegiate Educational Service For Govt. Arts & Science COLLEGES - 2012nellai kumarNo ratings yet
- Analog Digital LabDocument3 pagesAnalog Digital LabAdvanceElectronicesNo ratings yet
- Food Science Lab ReportDocument9 pagesFood Science Lab Reportapi-341135689No ratings yet
- Boq Mo Jagdishpur-BhojpurDocument18 pagesBoq Mo Jagdishpur-BhojpurSATYAM BISENNo ratings yet
- Reduction of Vibrations G.B. Warburton, J. Wiley & Sons, Chichester, 1992, 91 Pages, 17.50 - 1993Document2 pagesReduction of Vibrations G.B. Warburton, J. Wiley & Sons, Chichester, 1992, 91 Pages, 17.50 - 1993ciscoNo ratings yet
- ME1202-Tutorial 2Document1 pageME1202-Tutorial 2manarajNo ratings yet
- Piranha - Taylor TrumpetsDocument1 pagePiranha - Taylor TrumpetseddiediazNo ratings yet
- Astm C 232-2020Document3 pagesAstm C 232-2020Mohammed Ali100% (1)
- Web-Based Procurement SystemDocument29 pagesWeb-Based Procurement SystemMish Lei Franxh100% (1)
- BAMU Hallticket MpharmDocument1 pageBAMU Hallticket MpharmRaman NaiknawareNo ratings yet
- Managerial Acceptance of Scientific Recommendations: C. West ChurchmanDocument8 pagesManagerial Acceptance of Scientific Recommendations: C. West ChurchmanMega Free ex deeNo ratings yet
- E&C Important QuestionsDocument9 pagesE&C Important QuestionsAnish yadav 117No ratings yet
- Lecture 8 CADCAMDocument31 pagesLecture 8 CADCAMAnand P DwivediNo ratings yet
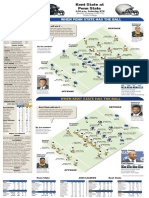
- Kent State at Penn StateDocument1 pageKent State at Penn StatedlevarseNo ratings yet
- Master of Business Administration: MOS Marketing of ServicesDocument31 pagesMaster of Business Administration: MOS Marketing of ServicesTrần Hoàng TrinhNo ratings yet
- General Structure of Transportation ProblemDocument9 pagesGeneral Structure of Transportation ProblemRishab Jain 2027203No ratings yet
- Douglas 2002 - Rockmasses Shear StrengthDocument543 pagesDouglas 2002 - Rockmasses Shear StrengthsamiNo ratings yet
- Schneider Acti9 Control CatalogueDocument36 pagesSchneider Acti9 Control CatalogueChaouki AbdallahNo ratings yet
- Exam 220-1101 (Core 1)Document252 pagesExam 220-1101 (Core 1)Ahmed Baryal100% (1)