You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Ascon - Rectifier FR 48V-1200WDocument2 pagesAscon - Rectifier FR 48V-1200Wsebax123No ratings yet
- Gujarat Technological University: Chandkheda, Ahmedabad. AffiliatedDocument31 pagesGujarat Technological University: Chandkheda, Ahmedabad. AffiliatedNirav ChauhanNo ratings yet
- RMZ BF2 Ix IPh RAgj ZDocument5 pagesRMZ BF2 Ix IPh RAgj ZNirav ChauhanNo ratings yet
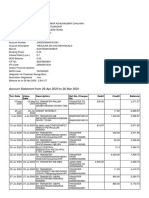
- DP 40116969 01022021 28022021Document2 pagesDP 40116969 01022021 28022021Nirav ChauhanNo ratings yet
- Cha:4 Potentiometers: Principal of D.C. Potentiometer Crompton's Potentiometer Application of DC PotentiometerDocument16 pagesCha:4 Potentiometers: Principal of D.C. Potentiometer Crompton's Potentiometer Application of DC PotentiometerNirav ChauhanNo ratings yet
- 199999914506-Electrical Engineering - Chauhan Niravkumar AshokkumarDocument14 pages199999914506-Electrical Engineering - Chauhan Niravkumar AshokkumarNirav ChauhanNo ratings yet
- Cha:3 Special Instruments: Power Factor Meter Frequency Meter Synchroscope Phase Sequence IndicatorDocument25 pagesCha:3 Special Instruments: Power Factor Meter Frequency Meter Synchroscope Phase Sequence IndicatorNirav ChauhanNo ratings yet
- Sardar Vallabhbhai Patel Institute of Technology, VasadDocument1 pageSardar Vallabhbhai Patel Institute of Technology, VasadNirav ChauhanNo ratings yet
- 2260-Article Text-6805-1-10-20161113Document15 pages2260-Article Text-6805-1-10-20161113Nirav ChauhanNo ratings yet
- CHAPTER:2 Measuring InstrumentsDocument27 pagesCHAPTER:2 Measuring InstrumentsNirav ChauhanNo ratings yet
- Decentralized Robust Adaptive-Output Feedback Controller For Power System Load Frequency ControlDocument10 pagesDecentralized Robust Adaptive-Output Feedback Controller For Power System Load Frequency ControlNirav ChauhanNo ratings yet
- Preparation For Engineering: Vacuum Circuit BreakerDocument15 pagesPreparation For Engineering: Vacuum Circuit BreakerNirav ChauhanNo ratings yet
- ECA Lab Session: Nodal Analysis Nodal AnalysisDocument10 pagesECA Lab Session: Nodal Analysis Nodal AnalysisNirav ChauhanNo ratings yet
- Certificate of Participation: All India Council For Technical EducationDocument1 pageCertificate of Participation: All India Council For Technical EducationNirav ChauhanNo ratings yet
- Maximum Power Transfer TheoremDocument13 pagesMaximum Power Transfer TheoremNirav ChauhanNo ratings yet
- ECA Lab Session: Mesh Analysis Mesh AnalysisDocument10 pagesECA Lab Session: Mesh Analysis Mesh AnalysisNirav ChauhanNo ratings yet
- ECA Lab Session: Thevenin's Theorem Thevenin's TheoremDocument13 pagesECA Lab Session: Thevenin's Theorem Thevenin's TheoremNirav ChauhanNo ratings yet
- ECA Lab Session: Superposition Theorem Superposition TheoremDocument11 pagesECA Lab Session: Superposition Theorem Superposition TheoremNirav ChauhanNo ratings yet
- The Bridge R... - CheggDocument3 pagesThe Bridge R... - Cheggsal27adamNo ratings yet
- EE6201-Circuit Theory PDFDocument18 pagesEE6201-Circuit Theory PDFKevin EstaNo ratings yet
- U WaveDocument54 pagesU WaveRatheesh RsNo ratings yet
- RF Circuit Fabrication RulesDocument51 pagesRF Circuit Fabrication Rulesazizhamdi100% (1)
- 1SFA894016R7000 pstb470 600 70 SoftstarterDocument3 pages1SFA894016R7000 pstb470 600 70 SoftstarterJhon RiosNo ratings yet
- Audio Compressor Limiter (ALM-2011) : ConstructionDocument4 pagesAudio Compressor Limiter (ALM-2011) : ConstructionSharbel AounNo ratings yet
- Short Circuit of Inverter BasedDocument11 pagesShort Circuit of Inverter Basedoliver voltaNo ratings yet
- GCSE Chemistry Electrolysis. AQA OCR Edexcel. QuestionsDocument4 pagesGCSE Chemistry Electrolysis. AQA OCR Edexcel. QuestionsRhona MatahariNo ratings yet
- Right Channel Only Repeat For Left Channel: +/-26V Power SupplyDocument1 pageRight Channel Only Repeat For Left Channel: +/-26V Power SupplyHenk VenemaNo ratings yet
- Electricity Exercise Level 1:: Ohm MDocument6 pagesElectricity Exercise Level 1:: Ohm MriddhiNo ratings yet
- Xi - ChemistryDocument4 pagesXi - Chemistrybinodxyz0No ratings yet
- Analog Devices - by - Element14 - Batch - 1Document35 pagesAnalog Devices - by - Element14 - Batch - 1arjetaNo ratings yet
- PVC 4C Cable UnArmardDocument2 pagesPVC 4C Cable UnArmardNawarathna Engineering Dept.No ratings yet
- Aircraft Electrical SystemsDocument73 pagesAircraft Electrical Systemsdhirajpatil5559763100% (4)
- Parametric Equations - BetterExplainedDocument6 pagesParametric Equations - BetterExplainedavnishNo ratings yet
- Rajasthan Board Class 12 Physics Ss 40 2020Document12 pagesRajasthan Board Class 12 Physics Ss 40 2020raghavfinearts08No ratings yet
- Antenne A704521R0v06 DatasheetDocument1 pageAntenne A704521R0v06 DatasheetStefan SchettNo ratings yet
- Digital Bicycle Speedometer Using DynamoDocument19 pagesDigital Bicycle Speedometer Using DynamoNitish KumarNo ratings yet
- P610 AOP610 É Um DUAL MOSFET CANAL N e P Com Diodos de Proteção-Driver de Inverter - LCD PDFDocument7 pagesP610 AOP610 É Um DUAL MOSFET CANAL N e P Com Diodos de Proteção-Driver de Inverter - LCD PDFKrista TranNo ratings yet
- Service Manual: VIO 100 C VIO 50 CDocument42 pagesService Manual: VIO 100 C VIO 50 CSerginho HenriqueNo ratings yet
- l78xx l78xxc L78xxab L78xxac STDocument57 pagesl78xx l78xxc L78xxab L78xxac STCarlos Milton Martinez GaleanoNo ratings yet
- ELEC 482 Module # 5 Outline TOPIC: DC Chopper DrivesDocument38 pagesELEC 482 Module # 5 Outline TOPIC: DC Chopper DrivesmrsploogeNo ratings yet
- Magnetic FieldsDocument19 pagesMagnetic FieldsengrroyNo ratings yet
- Physics Notes Chapter - 12 ElectrostaticsDocument18 pagesPhysics Notes Chapter - 12 ElectrostaticsranaateeqNo ratings yet
- RECTA DP 2 Instruction ManualDocument2 pagesRECTA DP 2 Instruction ManualxcpNo ratings yet
- Price QuotationDocument2 pagesPrice QuotationRACCT Construction and TradingNo ratings yet
- IR and UV SpectroDocument69 pagesIR and UV SpectroSk KumarNo ratings yet
- 5A IntegratorDocument5 pages5A IntegratorWilsonNo ratings yet
- Service Manual: N1B, /N1GDocument17 pagesService Manual: N1B, /N1Gdanielradu27No ratings yet