You might also like
- Radio Propagation and Adaptive Antennas for Wireless Communication Networks: Terrestrial, Atmospheric, and IonosphericFrom EverandRadio Propagation and Adaptive Antennas for Wireless Communication Networks: Terrestrial, Atmospheric, and IonosphericNo ratings yet
- 18 Satellite PDFDocument28 pages18 Satellite PDFsweety_1No ratings yet
- Satcom 07 Apr 2019Document55 pagesSatcom 07 Apr 2019Muhammed IfkazNo ratings yet
- MOS Integrated Circuit DesignFrom EverandMOS Integrated Circuit DesignE. WolfendaleNo ratings yet
- EngineeringDocument7 pagesEngineeringAalaa Hussein HamidNo ratings yet
- Indoor Radio Planning: A Practical Guide for 2G, 3G and 4GFrom EverandIndoor Radio Planning: A Practical Guide for 2G, 3G and 4GRating: 5 out of 5 stars5/5 (1)
- VSAT FundamentalsDocument43 pagesVSAT Fundamentalsberry_pl100% (4)
- 2018 MIPRO Link Budget Analysis For A Proposed CubesatDocument6 pages2018 MIPRO Link Budget Analysis For A Proposed CubesatFiras ZekiNo ratings yet
- Terrestrial Microwave Communications SystemDocument112 pagesTerrestrial Microwave Communications SystemAnonymous 5ZR8rH3No ratings yet
- Earth Station TechnologyDocument13 pagesEarth Station Technologyaya__ayakNo ratings yet
- Satellite TerminologyDocument14 pagesSatellite TerminologyEsapa EyongesiNo ratings yet
- Lecture 1 - Microwave SystemsDocument53 pagesLecture 1 - Microwave SystemsAbdul SuboorNo ratings yet
- KJuxuagSyaG - Article BELKACEM Adel UWB Antennas Cognitive RadioDocument5 pagesKJuxuagSyaG - Article BELKACEM Adel UWB Antennas Cognitive Radioimad ADJALINo ratings yet
- Skraparlis 2009Document4 pagesSkraparlis 2009VanNo ratings yet
- Propagation ModelsDocument48 pagesPropagation ModelsAmir MolazecirovicNo ratings yet
- Satellite Link DesignDocument18 pagesSatellite Link DesignAmit PrajapatiNo ratings yet
- Increase The Immunity Satellite TV Channels by Usingmulti-Bouquetshopping TechniquesDocument9 pagesIncrease The Immunity Satellite TV Channels by Usingmulti-Bouquetshopping TechniquesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- The Evolution of Base Station Antennas For Mobile CommunicationsDocument8 pagesThe Evolution of Base Station Antennas For Mobile CommunicationsAnup KumarNo ratings yet
- Mallesh AntennaDocument26 pagesMallesh AntennaJainuddin ShNo ratings yet
- Lesson 8 - FM Broadcasting StandardsDocument8 pagesLesson 8 - FM Broadcasting StandardsYousef BobadillaNo ratings yet
- Causes of Degradation of C - N and ItsDocument6 pagesCauses of Degradation of C - N and ItsUmer Farooque RathoreNo ratings yet
- Site SelectionDocument3 pagesSite SelectionGray FullbusterNo ratings yet
- Telecommunication Network Design - Microwave Link DesignDocument86 pagesTelecommunication Network Design - Microwave Link DesignJorma Kekalainen100% (1)
- Basics of TransmissionDocument41 pagesBasics of TransmissionRishel PuriNo ratings yet
- Introduction To MicrowaveDocument13 pagesIntroduction To MicrowaveEmmanuel AlapNo ratings yet
- Link Budget Analysis For A Proposed CubesatDocument6 pagesLink Budget Analysis For A Proposed CubesatDaniel OspinaNo ratings yet
- C Band and Ext. C-BandDocument4 pagesC Band and Ext. C-BandAwadalla JbooraNo ratings yet
- COMMUNICATION SATELLITEfinal 2107axDocument21 pagesCOMMUNICATION SATELLITEfinal 2107axremonita hufaNo ratings yet
- MW FundamentalsDocument22 pagesMW FundamentalsPankaj Choudhary100% (1)
- Tilt Mec&ElectDocument5 pagesTilt Mec&ElecteperezduarteNo ratings yet
- Satellite Link Budget CalculationDocument64 pagesSatellite Link Budget CalculationHosam SaidNo ratings yet
- Electronics: A Compact In-Line Waveguide-to-Microstrip Transition in The Q-Band For Radio Astronomy ApplicationsDocument9 pagesElectronics: A Compact In-Line Waveguide-to-Microstrip Transition in The Q-Band For Radio Astronomy ApplicationshesoyamyecgaaaNo ratings yet
- CHP 04Document31 pagesCHP 04Raji SharmiNo ratings yet
- A Site-Specific MIMO Channel Simulator For Hilly and Mountainous EnvironmentsDocument6 pagesA Site-Specific MIMO Channel Simulator For Hilly and Mountainous EnvironmentsTiago NunesNo ratings yet
- Satellite Communication: Satellite Link Design and Link Budget CalculationsDocument41 pagesSatellite Communication: Satellite Link Design and Link Budget CalculationsRishi KhanNo ratings yet
- (Link Budget of GEO Satellite (Nile Sat) at Ku-Band Frequency) Case of Study Tripoli and SebhaDocument5 pages(Link Budget of GEO Satellite (Nile Sat) at Ku-Band Frequency) Case of Study Tripoli and SebhaFiras ZekiNo ratings yet
- 66 - 98 - SATCOM-0n The Move Antennatracking SurveyDocument4 pages66 - 98 - SATCOM-0n The Move Antennatracking SurveylongNo ratings yet
- Design of Wideband Circularly Polarized Capacitive Fed Microstrip AntennaDocument8 pagesDesign of Wideband Circularly Polarized Capacitive Fed Microstrip AntennanripinthampanNo ratings yet
- FREE SPACE LOSS LECTURE Microwave Link DesignDocument132 pagesFREE SPACE LOSS LECTURE Microwave Link DesignAlas Mallari Donato100% (1)
- Chapter 10 - Wave Propagation in Satellite CommunicationDocument28 pagesChapter 10 - Wave Propagation in Satellite CommunicationQuang HưngNo ratings yet
- Path Profile Analysis of A LOS System Using 3-D Digital MapDocument11 pagesPath Profile Analysis of A LOS System Using 3-D Digital MapJawad HussineNo ratings yet
- 22f4 PDFDocument7 pages22f4 PDFAnonymous tG4YlJqdyNo ratings yet
- VSATfinalDocument77 pagesVSATfinalnady2209No ratings yet
- Satellite Communication An IntroductionDocument19 pagesSatellite Communication An IntroductionGolam Robbani RabbiNo ratings yet
- Chapter-4 Mobile Radio Propagation Large-Scale Path LossDocument106 pagesChapter-4 Mobile Radio Propagation Large-Scale Path Losspiyushkumar151100% (2)
- Radio Comm & SatelliteCommDocument48 pagesRadio Comm & SatelliteCommKarl MengNo ratings yet
- Article ASMS2006 SDMB IA v1 2Document8 pagesArticle ASMS2006 SDMB IA v1 2martinbeaNo ratings yet
- 3GPP NB-IoT Coverage Extension Using LEO SatellitesDocument5 pages3GPP NB-IoT Coverage Extension Using LEO SatelliteslucasolveigaNo ratings yet
- AssignmentDocument4 pagesAssignmentFaraz Ali KhanNo ratings yet
- Wireless 07Document39 pagesWireless 07karthi_gopalNo ratings yet
- Vsat IeeeDocument7 pagesVsat IeeeMehran RafieiNo ratings yet
- Basics of Satellite Communication 1Document42 pagesBasics of Satellite Communication 1rajeev1579100% (4)
- A Shorted-Annular-Ring GPS Antenna For Freight-Carrying Autonomous Rail VehiclesDocument2 pagesA Shorted-Annular-Ring GPS Antenna For Freight-Carrying Autonomous Rail Vehiclesاحمد نديم اسماعيلNo ratings yet
- Vilar, R. Et Al. - Q-Band Millimeter Wave AntennasDocument25 pagesVilar, R. Et Al. - Q-Band Millimeter Wave AntennasSatadal GuptaNo ratings yet
- Uo 876 KfvuiteyhrtyhryujyujuDocument84 pagesUo 876 KfvuiteyhrtyhryujyujurubbbitsNo ratings yet
- Presented By:: Reshma.D & Sravani.BDocument18 pagesPresented By:: Reshma.D & Sravani.Bsrinu0887No ratings yet
- Controllable Band-Notched UWB Printed Monopole AntennaDocument5 pagesControllable Band-Notched UWB Printed Monopole AntennaInnovative Research PublicationsNo ratings yet
- Wee Rack OdyDocument9 pagesWee Rack OdyTiếu Tam TiếuNo ratings yet
- GPR ProcessingDocument23 pagesGPR Processingnaivedya_mishraNo ratings yet
- Feminism in IrDocument55 pagesFeminism in IrudayNo ratings yet
- Amity School of Engineering & Technology: Submitted To: Submitted byDocument32 pagesAmity School of Engineering & Technology: Submitted To: Submitted byudayNo ratings yet
- WPR 10Document1 pageWPR 10udayNo ratings yet
- Potfolio Group 1 - Right To EducationDocument33 pagesPotfolio Group 1 - Right To EducationudayNo ratings yet
- Case StudyDocument6 pagesCase StudyudayNo ratings yet
- Amity School of Engineering & Technology: Submitted To: Submitted byDocument25 pagesAmity School of Engineering & Technology: Submitted To: Submitted byudayNo ratings yet
- Amity University, Uttar Pradesh Department of Electronic &communicationDocument20 pagesAmity University, Uttar Pradesh Department of Electronic &communicationudayNo ratings yet
- Future Work Plans:: Improve The Results by Changing The Slots Parameters And/or Design of The SlotDocument1 pageFuture Work Plans:: Improve The Results by Changing The Slots Parameters And/or Design of The SlotudayNo ratings yet
- Module 2Document67 pagesModule 2udayNo ratings yet
- Module 5Document82 pagesModule 5udayNo ratings yet
- MTech ECE Satellite Comms Module 1Document94 pagesMTech ECE Satellite Comms Module 1udayNo ratings yet
- Module 3Document79 pagesModule 3udayNo ratings yet
- Future Work Plans:: Designing of Antenna Using Results Obtained From Implementing Genetic AlgorithmDocument1 pageFuture Work Plans:: Designing of Antenna Using Results Obtained From Implementing Genetic AlgorithmudayNo ratings yet
- Future Work Plans:: Use Different Types of Slots Cutting To Check If The Results Are Improved or NotDocument1 pageFuture Work Plans:: Use Different Types of Slots Cutting To Check If The Results Are Improved or NotudayNo ratings yet
- Generate and sort random numbersDocument9 pagesGenerate and sort random numbersudayNo ratings yet
- WPR 7Document1 pageWPR 7udayNo ratings yet
- Advanced Simulation Lab: Amity University Noida, Uttar PradeshDocument50 pagesAdvanced Simulation Lab: Amity University Noida, Uttar PradeshudayNo ratings yet
- LabVIEW VI to compare numbers using BooleansDocument3 pagesLabVIEW VI to compare numbers using BooleansudayNo ratings yet
- Open Ended Aim Lab ViewDocument2 pagesOpen Ended Aim Lab ViewudayNo ratings yet
- Reflexive Verbs in SpanishDocument2 pagesReflexive Verbs in SpanishudayNo ratings yet
- Practice Experiment 1Document19 pagesPractice Experiment 1udayNo ratings yet
- Embedded Microcontroller CourseDocument3 pagesEmbedded Microcontroller CourseudayNo ratings yet
- Verilog EXPERIMENT 4Document8 pagesVerilog EXPERIMENT 4udayNo ratings yet
- Verilog (About Tool and Steps)Document4 pagesVerilog (About Tool and Steps)udayNo ratings yet
- Chapter-1: 1.1. Serial Data TransmissionDocument44 pagesChapter-1: 1.1. Serial Data TransmissionudayNo ratings yet
- Verilog EXPERIMENT 2Document11 pagesVerilog EXPERIMENT 2udayNo ratings yet
- Lab FormatDocument1 pageLab FormatudayNo ratings yet
- 8 to 3 Priority Encoder Verilog ImplementationDocument5 pages8 to 3 Priority Encoder Verilog ImplementationudayNo ratings yet
- Verilog (Exp 11)Document6 pagesVerilog (Exp 11)udayNo ratings yet
- C ProgrammingDocument14 pagesC ProgrammingSakib MuhaiminNo ratings yet
- Act Sheet For RoboticsDocument4 pagesAct Sheet For RoboticsErah Kim GomezNo ratings yet
- EagleBurgmann - PDGS Dry Gas Seal Upgrade For Australian LNG ProjectDocument2 pagesEagleBurgmann - PDGS Dry Gas Seal Upgrade For Australian LNG Projectsudhindra_tiwariNo ratings yet
- Love Our CultureDocument2 pagesLove Our CulturePutry LinggarNo ratings yet
- DP Go 3Document2 pagesDP Go 3Ajeet KumarNo ratings yet
- Lecture3-1 OSSS TreesDocument39 pagesLecture3-1 OSSS Treesahmezo100% (1)
- SM - Project Report - Group-11Document15 pagesSM - Project Report - Group-110463SanjanaNo ratings yet
- CS 170 Efficient Algorithms and Intractable Problems Spring 2020 A. Chiesa and J. Nelson Problem StatementDocument5 pagesCS 170 Efficient Algorithms and Intractable Problems Spring 2020 A. Chiesa and J. Nelson Problem StatementKarin AngelisNo ratings yet
- Ahmad Hassan PDFDocument2 pagesAhmad Hassan PDFAhmad HassanNo ratings yet
- 2.2 Organizational StructureDocument60 pages2.2 Organizational StructureMateo Valenzuela Rodriguez100% (1)
- EC-Council Certification Path Senior Security Forensics Advanced Disaster Recovery Secure Programmer LawyersDocument1 pageEC-Council Certification Path Senior Security Forensics Advanced Disaster Recovery Secure Programmer Lawyersrusty rawatNo ratings yet
- E-mail Encryption Project ReportDocument15 pagesE-mail Encryption Project Reportishant7890No ratings yet
- CT18 Spare Part Book Without EngineDocument86 pagesCT18 Spare Part Book Without EngineTSPSRL Import ExportNo ratings yet
- Data Domain Command Reference Guide 6.0Document464 pagesData Domain Command Reference Guide 6.0markus_egli100% (1)
- Multi-Disc Dehydrators: MDQ / MDC / JDDocument11 pagesMulti-Disc Dehydrators: MDQ / MDC / JDmichie37No ratings yet
- Journal of Energy StorageDocument14 pagesJournal of Energy StorageLuis Antonio CNo ratings yet
- How VFDs Improve Cane Mill Efficiency and Reduce Energy CostsDocument5 pagesHow VFDs Improve Cane Mill Efficiency and Reduce Energy CostsEdison EstrellaNo ratings yet
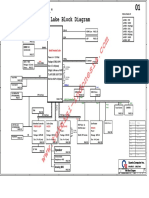
- Intel Gemini Lake Block Diagram EJ-11 ZHE 11"Document37 pagesIntel Gemini Lake Block Diagram EJ-11 ZHE 11"Tomy Aditya PratamaNo ratings yet
- Users Manual 3 994639Document140 pagesUsers Manual 3 994639Parul MehtaNo ratings yet
- Soil Mechanics I Cee 305: 2.0 Consistency Limit (Atterberge Limit)Document6 pagesSoil Mechanics I Cee 305: 2.0 Consistency Limit (Atterberge Limit)ABUBAKAR SANI HABIBUNo ratings yet
- Description: First Angle ProjectionDocument1 pageDescription: First Angle Projectionlebanese.intlNo ratings yet
- OXIMATE SDN BHD product list and contact detailsDocument3 pagesOXIMATE SDN BHD product list and contact detailsWANNo ratings yet
- USA IT Staffing - Roles of Bench Sale RecruitersDocument37 pagesUSA IT Staffing - Roles of Bench Sale Recruitersyaminika singereddyNo ratings yet
- Ch1 3 PDFDocument32 pagesCh1 3 PDFmartiniro marsNo ratings yet
- P 11.4A Pressurization System InspectionDocument3 pagesP 11.4A Pressurization System Inspectioncrye shotNo ratings yet
- WEG Programing Manual 10003989140 SSW900 enDocument167 pagesWEG Programing Manual 10003989140 SSW900 enAntonio Sergio Correa JuniorNo ratings yet
- Sorting and SearchDocument27 pagesSorting and SearchPawan KumarNo ratings yet
- Row Based+vs+Column Based+DatabasesDocument17 pagesRow Based+vs+Column Based+DatabasesbimoNo ratings yet
- Final Report For Research PaperDocument55 pagesFinal Report For Research PaperAnshu PandeyNo ratings yet
- IBP - Help For Standard Keyfigures PDFDocument311 pagesIBP - Help For Standard Keyfigures PDFSaurabh KulkarniNo ratings yet