You might also like
- Fantasticks Audition Info 082813Document4 pagesFantasticks Audition Info 082813jamesoperamanNo ratings yet
- Environmental Impacts of Digital Technology Europe LCA 7 Dec 2021Document78 pagesEnvironmental Impacts of Digital Technology Europe LCA 7 Dec 2021Αναστάσιος Μπαλάσκας100% (1)
- Deep Space Optical CommunicationsFrom EverandDeep Space Optical CommunicationsHamid HemmatiNo ratings yet
- Intelligence AnalysisDocument36 pagesIntelligence AnalysisErik DravenNo ratings yet
- Carl Icahn's Letter To Apple's Tim CookDocument4 pagesCarl Icahn's Letter To Apple's Tim CookCanadianValueNo ratings yet
- The Renaissance and The Rise of DrawingDocument33 pagesThe Renaissance and The Rise of DrawingRobert HorvitzNo ratings yet
- 8 X4 Wog V2 LDocument169 pages8 X4 Wog V2 LArashDehghanianNo ratings yet
- Vision Systems Applications PDFDocument618 pagesVision Systems Applications PDFJorge PerdigonNo ratings yet
- Dissenting Opinion of Judge Tanaka in South West Africa Case, ICJ Reports, 1966Document4 pagesDissenting Opinion of Judge Tanaka in South West Africa Case, ICJ Reports, 1966Katrina Pamela AtinNo ratings yet
- Crowd SimulationDocument249 pagesCrowd SimulationImran MahmoodNo ratings yet
- 79 PO YENG CHEO V LIMDocument1 page79 PO YENG CHEO V LIMRaven Claire MalacaNo ratings yet
- Sy 2022-2023 Technical Assistance Accomplishment Report For The Month of November 2022Document3 pagesSy 2022-2023 Technical Assistance Accomplishment Report For The Month of November 2022JAMES HENSONNo ratings yet
- Big Data Conceptual Analysis and Applications by Michael Z. Zgurovsky, Yuriy P. ZaychenkoDocument298 pagesBig Data Conceptual Analysis and Applications by Michael Z. Zgurovsky, Yuriy P. ZaychenkoChristian Emmanuel NkengneNo ratings yet
- Human Activity Recognition With Sensor ApproachDocument179 pagesHuman Activity Recognition With Sensor ApproachFrancesco FerrettoNo ratings yet
- Design Project - Report - Edm18b050Document23 pagesDesign Project - Report - Edm18b050Varshit SoorampalliNo ratings yet
- A Survey On Object Detection and Tracking Algorithms (2013)Document75 pagesA Survey On Object Detection and Tracking Algorithms (2013)Hira RasabNo ratings yet
- Budd S 2022 PHD ThesisDocument214 pagesBudd S 2022 PHD ThesisCuuzonNo ratings yet
- Thesis On Gait BiometricDocument53 pagesThesis On Gait Biometricshreya singhNo ratings yet
- Balahmadi ThesisDocument261 pagesBalahmadi ThesisMelvin SpekNo ratings yet
- A Concise Guide To Elicitation Methodology - Adam S Williams and Francisco OrtegaDocument62 pagesA Concise Guide To Elicitation Methodology - Adam S Williams and Francisco Ortegads0313No ratings yet
- !!! 2010 Vehicle Perception - Localization, Mapping With Detection Classification and Tracking of Moving ObjectsDocument127 pages!!! 2010 Vehicle Perception - Localization, Mapping With Detection Classification and Tracking of Moving ObjectsMohamed Hechmi JERIDINo ratings yet
- PoothicottuJacob GeorgeDocument103 pagesPoothicottuJacob GeorgezarasettNo ratings yet
- Thorat PHD ThesisDocument123 pagesThorat PHD ThesisSushrut ThoratNo ratings yet
- Deep Learning Methods For Human Action Recognition: Zeqi YuDocument97 pagesDeep Learning Methods For Human Action Recognition: Zeqi YupalansamyNo ratings yet
- Tools and Methods To Support Opportunistic Human Activity RecognitionDocument165 pagesTools and Methods To Support Opportunistic Human Activity RecognitionkaveeshaNo ratings yet
- Autonomous Detection Robots in Search and RescueDocument24 pagesAutonomous Detection Robots in Search and RescuesumandaymattgianNo ratings yet
- Diversity of Methodological Approaches in Social Sciences Example of The Analysis of Media and Online Information Inna Lyubareva Full ChapterDocument68 pagesDiversity of Methodological Approaches in Social Sciences Example of The Analysis of Media and Online Information Inna Lyubareva Full Chapterlashawn.fain938100% (11)
- Live Memory Forensics On Android With VolatilityDocument109 pagesLive Memory Forensics On Android With VolatilitykasmaNo ratings yet
- LC Thesis FinalDocument138 pagesLC Thesis FinalsummrinaNo ratings yet
- (Smart Sensors, Measurement and Instrumentation) Nabil Derbel - Olfa Kanoun - Advanced Methods For Human Biometrics-Springer (2021)Document305 pages(Smart Sensors, Measurement and Instrumentation) Nabil Derbel - Olfa Kanoun - Advanced Methods For Human Biometrics-Springer (2021)Sam WildNo ratings yet
- Multi-Modal People Detection From A Mobile Robot in Crowded ScenesDocument82 pagesMulti-Modal People Detection From A Mobile Robot in Crowded ScenesWilma PairoNo ratings yet
- Branko Ristic (Auth.) - Particle Filters For Random Set Models-Springer-Verlag New York (2013)Document183 pagesBranko Ristic (Auth.) - Particle Filters For Random Set Models-Springer-Verlag New York (2013)Mogaime BuendiaNo ratings yet
- Clarkson - Joshua White - PHD Thesis Proposal - JSW - d4Document45 pagesClarkson - Joshua White - PHD Thesis Proposal - JSW - d4watson76_76No ratings yet
- State of The Art of Mobile Biometrics, Liveness and Non-Coercion DetectionDocument135 pagesState of The Art of Mobile Biometrics, Liveness and Non-Coercion Detectionscience2222No ratings yet
- Software Requirements Specification: Social Distancing DetectionDocument10 pagesSoftware Requirements Specification: Social Distancing Detectionanubhav gautamNo ratings yet
- Report 1Document13 pagesReport 1Neena Zyadu PalackalNo ratings yet
- Vision in SportsDocument41 pagesVision in SportsSbongileNo ratings yet
- Ashwath Thesis PDFDocument90 pagesAshwath Thesis PDFAnuj MehtaNo ratings yet
- Download textbook Deep Learning For Medical Image Analysis 1St Edition S Kevin Zhou ebook all chapter pdfDocument53 pagesDownload textbook Deep Learning For Medical Image Analysis 1St Edition S Kevin Zhou ebook all chapter pdfdeloris.lee989No ratings yet
- Trupu MatematicDocument49 pagesTrupu MatematicDan TataruNo ratings yet
- Jan Meier MA PDFDocument92 pagesJan Meier MA PDFCHARANNo ratings yet
- Download textbook A Multivariate Claim Count Model For Applications In Insurance Daniela Anna Selch ebook all chapter pdfDocument53 pagesDownload textbook A Multivariate Claim Count Model For Applications In Insurance Daniela Anna Selch ebook all chapter pdfpenny.ramos175100% (16)
- Mapping Poverty Satellite PurlDocument61 pagesMapping Poverty Satellite PurlBrian MogambiNo ratings yet
- 2009 DelrosarioDocument74 pages2009 DelrosarioBalu KateNo ratings yet
- Download pdf The Information Theory Of Comparisons With Applications To Statistics And The Social Sciences Roger Bowden ebook full chapterDocument54 pagesDownload pdf The Information Theory Of Comparisons With Applications To Statistics And The Social Sciences Roger Bowden ebook full chapterjoseph.mefford166No ratings yet
- Anomalous Activity Detection For Intelligent Visual SurveillanceDocument36 pagesAnomalous Activity Detection For Intelligent Visual Surveillancearunimavijay mNo ratings yet
- Human Detection From Images and VideosDocument184 pagesHuman Detection From Images and VideosOscar GóngoraNo ratings yet
- Finalized Review ReportDocument13 pagesFinalized Review ReportSameer YounasNo ratings yet
- D OrigDocument197 pagesD OrighkhkNo ratings yet
- Thesis A SperottoDocument192 pagesThesis A SperottoВячеслав КазанцевNo ratings yet
- VOSAC: Adaptable Conversational Support Assistants Leveraging User-Configurable Knowledge Models On Mobile ComputersDocument16 pagesVOSAC: Adaptable Conversational Support Assistants Leveraging User-Configurable Knowledge Models On Mobile ComputersJoseph Willrich LutaloNo ratings yet
- Seunghan HanDocument270 pagesSeunghan HanSiddhartha AgnihotriNo ratings yet
- Neuromarketing in E-Commerce Compressed CompressedDocument102 pagesNeuromarketing in E-Commerce Compressed Compressedjuan felipe giraldoNo ratings yet
- ResoiviorDocument52 pagesResoiviorMichael SprinzlNo ratings yet
- A Report On Existing AI Work For Visually Impaired People: Ayesha TariqDocument51 pagesA Report On Existing AI Work For Visually Impaired People: Ayesha TariqAyeshaNo ratings yet
- Algorith Design Analysis Wirless NetworksDocument163 pagesAlgorith Design Analysis Wirless NetworksTodor GospodinovNo ratings yet
- Holographic DispalyDocument116 pagesHolographic DispalyShravya SirigiriNo ratings yet
- A Concise Introduction To Decentralized POMDPsDocument146 pagesA Concise Introduction To Decentralized POMDPsJichao HeNo ratings yet
- Detecion of Opinion Spam in Online ReviewsDocument35 pagesDetecion of Opinion Spam in Online ReviewsMayank SainiNo ratings yet
- 1 s2.0 S1568494609000908 Main PDFDocument35 pages1 s2.0 S1568494609000908 Main PDFJulio CésarNo ratings yet
- ZAI MSC 2015 20 LuoDocument73 pagesZAI MSC 2015 20 LuoLKNo ratings yet
- Radiometric Tracking Techniques for Deep-Space NavigationFrom EverandRadiometric Tracking Techniques for Deep-Space NavigationNo ratings yet
- Uncertainty in Industrial Practice: A Guide to Quantitative Uncertainty ManagementFrom EverandUncertainty in Industrial Practice: A Guide to Quantitative Uncertainty ManagementNo ratings yet
- Price formation in the cryptocurrency market. A hypotheses driven econometric analysis of cryptocurrency price determinantsFrom EverandPrice formation in the cryptocurrency market. A hypotheses driven econometric analysis of cryptocurrency price determinantsNo ratings yet
- Improving Survey Response: Lessons Learned from the European Social SurveyFrom EverandImproving Survey Response: Lessons Learned from the European Social SurveyNo ratings yet
- Simulation For Multiprocessor Real-Time Scheduling EvaluationDocument6 pagesSimulation For Multiprocessor Real-Time Scheduling EvaluationHareesh ArjunNo ratings yet
- 17121A04P2 ReportDocument33 pages17121A04P2 ReportHareesh ArjunNo ratings yet
- Simulation Tool For Real-Time Multiprocessor Scheduling Designer Guide V3.3.1 - September 2009Document14 pagesSimulation Tool For Real-Time Multiprocessor Scheduling Designer Guide V3.3.1 - September 2009Hareesh ArjunNo ratings yet
- Electronics: Homomorphic Encryption and Network Coding in Iot Architectures: Advantages and Future ChallengesDocument14 pagesElectronics: Homomorphic Encryption and Network Coding in Iot Architectures: Advantages and Future ChallengesHareesh ArjunNo ratings yet
- Homomorphic Encryption in IotDocument15 pagesHomomorphic Encryption in IotHareesh ArjunNo ratings yet
- 2018 - Gener Al Catalogue: Appar El Sewing MachinesDocument106 pages2018 - Gener Al Catalogue: Appar El Sewing MachinesShafikul IslamNo ratings yet
- Module 1 ED206Document14 pagesModule 1 ED206Li SiNo ratings yet
- In The Hon'Ble High Court of Delhi, New Delhi W.P. (C) No. of 2016Document3 pagesIn The Hon'Ble High Court of Delhi, New Delhi W.P. (C) No. of 2016Vishakha MittalNo ratings yet
- Freelisting MethodDocument8 pagesFreelisting MethodDwain DoctanaNo ratings yet
- Time in SpanishDocument3 pagesTime in SpanishmindymarieshamblinNo ratings yet
- Assignment V Intigral CalculusDocument2 pagesAssignment V Intigral CalculusAnonymous 3JcBtYTNo ratings yet
- Nehemiah 3 (Formula For Success)Document3 pagesNehemiah 3 (Formula For Success)stadairNo ratings yet
- Business Valuation of WiproDocument13 pagesBusiness Valuation of Wiprohardik08patelNo ratings yet
- Accomplished Weekly Learning Plan 1Document4 pagesAccomplished Weekly Learning Plan 1Jem M. BandajaNo ratings yet
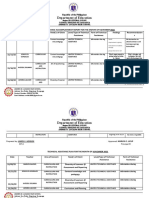
- Department of Education Emiliano Tria Tirona Memorial National High SchoolDocument3 pagesDepartment of Education Emiliano Tria Tirona Memorial National High SchoolRuby ann corpuzNo ratings yet
- Greena Fernando V. Teckla Saparamadu: HeldDocument5 pagesGreena Fernando V. Teckla Saparamadu: Heldmohganewatta ganewattaNo ratings yet
- Effectiveness of Monetary Policy To Control Inflation inDocument18 pagesEffectiveness of Monetary Policy To Control Inflation inPrem KumarNo ratings yet
- Eagle Realty V RepublicDocument3 pagesEagle Realty V RepublicJade Palace TribezNo ratings yet
- Carl Stumpf Tonal FusionDocument1 pageCarl Stumpf Tonal FusionAnonymous J5vpGuNo ratings yet
- The Law of Insurance (Exclusive)Document17 pagesThe Law of Insurance (Exclusive)belay abebeNo ratings yet
- Developmental Checklists: Birth To FiveDocument15 pagesDevelopmental Checklists: Birth To FiveIulia PetrescuNo ratings yet
- THE PROBLEM OF DATING IN LINGUISTICS (2004) by Mario AlineiDocument17 pagesTHE PROBLEM OF DATING IN LINGUISTICS (2004) by Mario Alineihisroyalslynessone2funkNo ratings yet
- Mabalacat City College Institute of Business Education: 3. Motivation TheoriesDocument3 pagesMabalacat City College Institute of Business Education: 3. Motivation Theoriesrebecca lisingNo ratings yet
- Japanese ArchitectureDocument28 pagesJapanese ArchitectureRENARD CATABAYNo ratings yet
- Ruby Heine Meat Morals MasculinityDocument4 pagesRuby Heine Meat Morals MasculinityHelenNo ratings yet
- Dr. JekyllDocument26 pagesDr. JekyllSamanta GonzalezNo ratings yet
- Tadigadapa-Nsf Erc ProposalDocument39 pagesTadigadapa-Nsf Erc Proposalapi-337162869No ratings yet
- Silvestre Bello IIIDocument6 pagesSilvestre Bello IIIAnonymous EvbW4o1U7No ratings yet
- Discrete Mathematics Question PaperDocument4 pagesDiscrete Mathematics Question PaperRajkumar Raaz0% (1)