You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Daedong Workshop Manual Production Release 1.0Document261 pagesDaedong Workshop Manual Production Release 1.0Khang Dang83% (12)
- Airplane Design Manual - TeichmannDocument501 pagesAirplane Design Manual - TeichmannJanus Pacis100% (3)
- Work-GPE-KE-questions and Mark SchemeDocument4 pagesWork-GPE-KE-questions and Mark SchemeAjibolaNo ratings yet
- Specification 33 KV LineDocument18 pagesSpecification 33 KV LineSatyaprasad NimmakayalaNo ratings yet
- Datasheet CM6802Document18 pagesDatasheet CM6802Gilson3DNo ratings yet
- Silergy Corp SY8213FCC - C178246Document9 pagesSilergy Corp SY8213FCC - C178246Thai LamNo ratings yet
- B005 - Translucent ConcreteDocument18 pagesB005 - Translucent ConcreteNyla VaidyaNo ratings yet
- AQA Chemistry (P 1) June 2019 QPDocument32 pagesAQA Chemistry (P 1) June 2019 QPOmar HafezNo ratings yet
- Victor SPX User's GuideDocument19 pagesVictor SPX User's Guidelily.huang3No ratings yet
- Manual BGE 6007Document5 pagesManual BGE 6007Brian BegordisNo ratings yet
- NCP6153 - Data Sheet Rev0 - 08212011Document36 pagesNCP6153 - Data Sheet Rev0 - 08212011vladimyuNo ratings yet
- The V4 Amplifiers Manual Issue 1Document12 pagesThe V4 Amplifiers Manual Issue 1Anonymous XwnSaYWNo ratings yet
- Kakute F7 AIO: User Manual & Installation Guide v1.0Document28 pagesKakute F7 AIO: User Manual & Installation Guide v1.0EJ EdgeNo ratings yet
- 235USX800DDocument15 pages235USX800DAndrew HopwoodNo ratings yet
- Karta Enkoderowa Oraz RS232RS485Document15 pagesKarta Enkoderowa Oraz RS232RS485Saber LeffiNo ratings yet
- PWM Proportional DriverDocument7 pagesPWM Proportional DriverSitt Nyein SoeNo ratings yet
- HS361 Series Instruction Manual (V1.7)Document53 pagesHS361 Series Instruction Manual (V1.7)m0st1tedNo ratings yet
- ABB String Inverters: UNO-2.0/3.0/3.6/4.2-TL-OUTD 2 To 4.2 KWDocument4 pagesABB String Inverters: UNO-2.0/3.0/3.6/4.2-TL-OUTD 2 To 4.2 KWCristian Rosales RomaoNo ratings yet
- Uno2 0-3 0-3 6-4 2Document4 pagesUno2 0-3 0-3 6-4 2Cristian Rosales RomaoNo ratings yet
- SMXX J T20 - TECH SPEC - 02 152Document5 pagesSMXX J T20 - TECH SPEC - 02 152Kenan TiroNo ratings yet
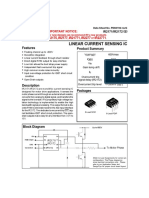
- Linear Current Sensing Ic: Product Summary FeaturesDocument6 pagesLinear Current Sensing Ic: Product Summary FeaturesBlackArnabNo ratings yet
- WS3418 WinsemiDocument8 pagesWS3418 WinsemiPaul MejiaNo ratings yet
- Supermodified - Miniature Controller For DC MotorsDocument38 pagesSupermodified - Miniature Controller For DC MotorsGiovanni GambaNo ratings yet
- Emdrive 500 Datasheet V2 6Document5 pagesEmdrive 500 Datasheet V2 6nathaniel benelishaNo ratings yet
- Atmel 2508 Zero Cross Detector ApplicationNote AVR182Document11 pagesAtmel 2508 Zero Cross Detector ApplicationNote AVR182armando nolasco rodriguezNo ratings yet
- Vestel 17mb24h Service ManualDocument46 pagesVestel 17mb24h Service Manualchris_crtv3753No ratings yet
- IBR67 ManualDocument6 pagesIBR67 ManualNomad HurstNo ratings yet
- UTC1018Document8 pagesUTC1018tangbunnaNo ratings yet
- AP63200/AP63201/AP63203/AP63205: 3.8V To 32V Input, 2A Low Iq Synchronous Buck With Enhanced Emi ReductionDocument19 pagesAP63200/AP63201/AP63203/AP63205: 3.8V To 32V Input, 2A Low Iq Synchronous Buck With Enhanced Emi ReductionJonathan Da SilvaNo ratings yet
- Sony Kv-29ls30e, K, U Kv29ls35b, E, K Chassis Fe2Document35 pagesSony Kv-29ls30e, K, U Kv29ls35b, E, K Chassis Fe21cvbnmNo ratings yet
- String Inverter: BPT-S 3-4.6Document4 pagesString Inverter: BPT-S 3-4.6BRINDUSE MARCELNo ratings yet
- GS-232B Om Eng Eaa14x105Document24 pagesGS-232B Om Eng Eaa14x105bsaylor123No ratings yet
- Indicador de Temperatura West 6010Document4 pagesIndicador de Temperatura West 6010SideparNo ratings yet
- Crossfire VR NoticeDocument12 pagesCrossfire VR NoticeChristopher A ArcherNo ratings yet
- Ir2175 (S) & (PBF) : Linear Current Sensing IcDocument7 pagesIr2175 (S) & (PBF) : Linear Current Sensing IcDavid CoronadoNo ratings yet
- Green Mode Power Switch For Valley Switching Converter - Low EMI and High Efficiency FSQ0365, FSQ0265, FSQ0165, FSQ321Document22 pagesGreen Mode Power Switch For Valley Switching Converter - Low EMI and High Efficiency FSQ0365, FSQ0265, FSQ0165, FSQ321Mekkati MekkatiNo ratings yet
- MTX Road Thunder RT251DDocument19 pagesMTX Road Thunder RT251DHugoNo ratings yet
- Om MTX X500D PDFDocument36 pagesOm MTX X500D PDFDanyNo ratings yet
- BCL4516E Installaion GuideDocument10 pagesBCL4516E Installaion GuideLászló NémethNo ratings yet
- Seaward Elec SE5120ST33 HF - C402714Document8 pagesSeaward Elec SE5120ST33 HF - C402714infosolutionNo ratings yet
- IRS2092 DatasheetDocument18 pagesIRS2092 DatasheetSergio Daniel BarretoNo ratings yet
- PAFM300WEX Rev4.1Document4 pagesPAFM300WEX Rev4.1Juan Enrique Castillo CanoNo ratings yet
- Service Manuals LG TV PLASMA MT42PZ10 MT-42PZ10 Service ManualDocument36 pagesService Manuals LG TV PLASMA MT42PZ10 MT-42PZ10 Service ManualAdam HansellNo ratings yet
- ZQ260G User Manual V1.0Document33 pagesZQ260G User Manual V1.0Sofiyan Hady0% (1)
- CA5260, CA5260A: FeaturesDocument7 pagesCA5260, CA5260A: FeaturesCharbel TadrosNo ratings yet
- Ipm650 PDFDocument5 pagesIpm650 PDFJAHDLNo ratings yet
- Ir2301 (S) & (PBF) : High and Low Side DriverDocument18 pagesIr2301 (S) & (PBF) : High and Low Side DriverDr Zeljko DespotovicNo ratings yet
- PAFM250W Rev4.1Document4 pagesPAFM250W Rev4.1Juan Enrique Castillo CanoNo ratings yet
- Sony DSR 45 45p ETDocument305 pagesSony DSR 45 45p ETNanji ChauhanNo ratings yet
- Barb - A - Watt QRP Power - SWR MeterDocument18 pagesBarb - A - Watt QRP Power - SWR Meterfox7878No ratings yet
- La 1140Document15 pagesLa 1140Mariano KokoNo ratings yet
- Irs2003 (S) PBF: Half-Bridge DriverDocument14 pagesIrs2003 (S) PBF: Half-Bridge DriverSundar RajanNo ratings yet
- ABB String Inverters: UNO-DM-3.3/4.0/4.6/5.0-TL-PLUS 3.3 To 5.0 KWDocument4 pagesABB String Inverters: UNO-DM-3.3/4.0/4.6/5.0-TL-PLUS 3.3 To 5.0 KWHayat DamouniNo ratings yet
- Nu Horizons Electronics Portal February 2009Document12 pagesNu Horizons Electronics Portal February 2009Nu HorizonsNo ratings yet
- PS5R-SB Switching Power SuppliesDocument2 pagesPS5R-SB Switching Power SuppliesMuhamad PriyatnaNo ratings yet
- Grundig gmm1100-stf55-1001 t2s08 Chassis (ET)Document23 pagesGrundig gmm1100-stf55-1001 t2s08 Chassis (ET)Simion VictorasNo ratings yet
- Project (Digital Filter)Document33 pagesProject (Digital Filter)NilNo ratings yet
- Project Title:-: Accident Identification and Alerting SystemDocument17 pagesProject Title:-: Accident Identification and Alerting SystemSathish KumarNo ratings yet
- TB82PH Quick-Start Guide: Echnical UpportDocument33 pagesTB82PH Quick-Start Guide: Echnical UpportCapacitacion TodocatNo ratings yet
- STK433 870 eDocument10 pagesSTK433 870 eneilgeddyNo ratings yet
- Owner'S Manual: Model: M12R Product Id:M12R15DDocument5 pagesOwner'S Manual: Model: M12R Product Id:M12R15Dchristopher ng'ang'a kamauNo ratings yet
- Tda 7372Document10 pagesTda 7372tuanbkfetNo ratings yet
- Lesson PlanDocument8 pagesLesson PlanKendall HenryNo ratings yet
- A Robotic Cane For Balance Maintenance AssistanceDocument12 pagesA Robotic Cane For Balance Maintenance AssistancesouravNo ratings yet
- Attitude Control of A QuadrotorDocument6 pagesAttitude Control of A QuadrotorGhada BeydounNo ratings yet
- Main Contents: Detection of Polypropylene Fibers With USTER Quantum 3Document16 pagesMain Contents: Detection of Polypropylene Fibers With USTER Quantum 3PricopNo ratings yet
- Data Structures and Algorithms in Java ™: Sixth EditionDocument8 pagesData Structures and Algorithms in Java ™: Sixth EditionIván Bartulin Ortiz0% (1)
- Gk247a A-008Document35 pagesGk247a A-008WidiMufantoNo ratings yet
- Electronegativity ScalesDocument8 pagesElectronegativity ScalesrashidNo ratings yet
- SADP Case StudyDocument11 pagesSADP Case StudyShane MakNo ratings yet
- Unit IIDocument17 pagesUnit IImansikakaniNo ratings yet
- GRADES 1 To 12 Daily Lesson Log: ESP A.P English MTB Math Filipino MAPEH (Health)Document7 pagesGRADES 1 To 12 Daily Lesson Log: ESP A.P English MTB Math Filipino MAPEH (Health)mayann ornedoNo ratings yet
- 7650-8550-DS-500-6105 DoneDocument91 pages7650-8550-DS-500-6105 DoneKhan Akhtar HusainNo ratings yet
- Beta CalculationDocument30 pagesBeta Calculationrksp99999No ratings yet
- Ansi Ashrae Standard 64-2020Document18 pagesAnsi Ashrae Standard 64-2020Michael ZannisNo ratings yet
- 2020 HW - Quadratics-1Document4 pages2020 HW - Quadratics-1Jacob RedoNo ratings yet
- Digiphone+: Surge Wave Receiver For Acoustic and Electromagnetic Fault PinpointingDocument2 pagesDigiphone+: Surge Wave Receiver For Acoustic and Electromagnetic Fault Pinpointingpatricio aguirreNo ratings yet
- CREST EduFund Mental Maths OlympiadDocument16 pagesCREST EduFund Mental Maths Olympiadishani.nagesh.raoNo ratings yet
- Zener DiodeDocument14 pagesZener Diodes211053176No ratings yet
- The Multiverse Might Be Real and It's StrangeDocument2 pagesThe Multiverse Might Be Real and It's StrangeHien Anh PhamNo ratings yet
- P30331 Data Sheet Phileas 250 January 2020 ENDocument2 pagesP30331 Data Sheet Phileas 250 January 2020 ENJosué A. López Cuevas / Marco A. LópezNo ratings yet
- RB1700 ActDocument6 pagesRB1700 ActArbaz KhanNo ratings yet
- HHE-VL-Recip-Compressor-Flyer-June-2021-pdf - Original FileDocument2 pagesHHE-VL-Recip-Compressor-Flyer-June-2021-pdf - Original Fileaatishsehgal94No ratings yet
- Enzyme Lab 1Document4 pagesEnzyme Lab 1PrincessTNo ratings yet
- Temperature Monitoring SystemDocument15 pagesTemperature Monitoring SystemAmanjit KaurNo ratings yet