You might also like
- Maintenance 40 Implementation HandbookDocument30 pagesMaintenance 40 Implementation HandbookOscar Niño100% (2)
- Automatic Induction Motor ProjectDocument78 pagesAutomatic Induction Motor ProjectPraveen MathiasNo ratings yet
- 500 Real English PhrasesDocument38 pages500 Real English PhrasesIon Sava100% (2)
- S 1514Document4 pagesS 1514bacuoc.nguyen356No ratings yet
- Applications of Electro-Hydraulics ActuatorsDocument6 pagesApplications of Electro-Hydraulics ActuatorsAnkur ThakurNo ratings yet
- STATCOM and Capacitor Banks in A Fixed-Speed Wind PDFDocument12 pagesSTATCOM and Capacitor Banks in A Fixed-Speed Wind PDFيوسف خضر النسورNo ratings yet
- STATCOM and Capacitor Banks in A Fixed-Speed Wind PDFDocument12 pagesSTATCOM and Capacitor Banks in A Fixed-Speed Wind PDFيوسف خضر النسورNo ratings yet
- PID Voltage Control For DC Motor Using MATLAB Simulink and Arduino MicrocontrollerDocument9 pagesPID Voltage Control For DC Motor Using MATLAB Simulink and Arduino MicrocontrollerAbhay JangirNo ratings yet
- Discrete Terminal Super-Twisting Current Control of A Six-Phase Induction MotorDocument15 pagesDiscrete Terminal Super-Twisting Current Control of A Six-Phase Induction MotorMoyasserengAlattarNo ratings yet
- Iot Based Protection of Three Phase Induction MotorDocument6 pagesIot Based Protection of Three Phase Induction Motor1345Pranmya LadEENo ratings yet
- PID Voltage Control For DC Motor Using MATLAB Simulink and Arduino MicrocontrollerDocument9 pagesPID Voltage Control For DC Motor Using MATLAB Simulink and Arduino Microcontrollerwilmer llamoctantaNo ratings yet
- Grid Connected PV SystemDocument36 pagesGrid Connected PV SystemSofyan PoniranNo ratings yet
- A New Hybrid Ant Colony Optimization Based PID of The Direct Torque Control For A Doubly Fed Induction MotorDocument24 pagesA New Hybrid Ant Colony Optimization Based PID of The Direct Torque Control For A Doubly Fed Induction Motorsaid mahfoudNo ratings yet
- Simple Design of Control Motor AC For Rotary ForceDocument8 pagesSimple Design of Control Motor AC For Rotary Force1BElvara Dinda FebrielaNo ratings yet
- Space Vector PaperDocument9 pagesSpace Vector Paperaswardi8756No ratings yet
- Small Wind Turbine Technology: April 2011Document31 pagesSmall Wind Turbine Technology: April 2011NEDALNo ratings yet
- Static Power Converters For A Wind Turbine Emulator Driving A Self-Excited Induction GeneratorDocument7 pagesStatic Power Converters For A Wind Turbine Emulator Driving A Self-Excited Induction Generatormuhamad otongNo ratings yet
- Wireless Control of Three Phase Induction MotorDocument51 pagesWireless Control of Three Phase Induction MotorREHAN ASLAMNo ratings yet
- Power Convertersfor Wind TurbinesDocument14 pagesPower Convertersfor Wind Turbinessteinman1No ratings yet
- Implementation of A High-Efficiency, High-Lifetime, and Low-Cost Converter For An Autonomous Photovoltaic Water Pumping SystemDocument11 pagesImplementation of A High-Efficiency, High-Lifetime, and Low-Cost Converter For An Autonomous Photovoltaic Water Pumping SystemHashim KhanNo ratings yet
- Advanced Electrical Machines and Machine-Based Systems For Electric and Hybrid VehiclesDocument25 pagesAdvanced Electrical Machines and Machine-Based Systems For Electric and Hybrid VehiclesjalilemadiNo ratings yet
- Waijung Blockset-STM32F4 Environment For Real Time Induction Motor Speed ControlDocument7 pagesWaijung Blockset-STM32F4 Environment For Real Time Induction Motor Speed ControlHưng NguyễnNo ratings yet
- Digital Speed Control of DC Motor For Industrial Automation Using Pulse Width Modulation TechniqueDocument6 pagesDigital Speed Control of DC Motor For Industrial Automation Using Pulse Width Modulation TechniquevendiNo ratings yet
- Self Excited Induction Generator: A Review: ArticleDocument7 pagesSelf Excited Induction Generator: A Review: ArticleMoyasserengAlattarNo ratings yet
- A Novel Online Stator Ground-Wall Insulation MDocument7 pagesA Novel Online Stator Ground-Wall Insulation Mtao fanNo ratings yet
- Advanced Drive System For DC Motor Using Multilevel DC/DC Buck Converter CircuitDocument13 pagesAdvanced Drive System For DC Motor Using Multilevel DC/DC Buck Converter CircuitShivaram H GNo ratings yet
- Representation of Type 4 Wind Turbine Generator For Steady State Short Circuit Calculations-Wouleye Kamara-UNIVERSITÉ de MONTRÉAL (2013) - TESISDocument89 pagesRepresentation of Type 4 Wind Turbine Generator For Steady State Short Circuit Calculations-Wouleye Kamara-UNIVERSITÉ de MONTRÉAL (2013) - TESISEdgardoKatReyesNo ratings yet
- Electric Propulsion System Characterization through ExperimentsDocument9 pagesElectric Propulsion System Characterization through Experiments呂文祺No ratings yet
- Grid-Connected Photovoltaic Systems: An Overview of Recent Research and Emerging PV Converter TechnologyDocument36 pagesGrid-Connected Photovoltaic Systems: An Overview of Recent Research and Emerging PV Converter TechnologyMUHAMAD ZAHIDNo ratings yet
- Energies 15 03564Document21 pagesEnergies 15 03564SuriyakumarNo ratings yet
- 5001 5005 1 PBDocument10 pages5001 5005 1 PBXanh NguyễnNo ratings yet
- Modelling and Simulation Speed Control of DC Motor using PSIMDocument10 pagesModelling and Simulation Speed Control of DC Motor using PSIMpathy cocreNo ratings yet
- Carte Tutelea Muntean DeaconuDocument182 pagesCarte Tutelea Muntean DeaconuThái NguyễnNo ratings yet
- A Design, Construction and Installation of 1000watt Inverter Using Solar Power SystemDocument10 pagesA Design, Construction and Installation of 1000watt Inverter Using Solar Power SystemDjNo ratings yet
- Current Issues On High Power CycloconverterDocument7 pagesCurrent Issues On High Power CycloconverterAlvaro CotaquispeNo ratings yet
- 10 1109icecube 2018 8610970Document7 pages10 1109icecube 2018 8610970FT SHERDILNo ratings yet
- JETIR22020746Document8 pagesJETIR22020746Martin EvdokimovNo ratings yet
- ECCEJianwei ZhangDocument8 pagesECCEJianwei ZhangRahul Kumar JhaNo ratings yet
- Primary Frequency Control Using Motor Drives For Short Term Grid DisturbancesDocument10 pagesPrimary Frequency Control Using Motor Drives For Short Term Grid DisturbancesSujin krishnaNo ratings yet
- Application of Fuzzy Logic To The Speed Control of DC MotorDocument6 pagesApplication of Fuzzy Logic To The Speed Control of DC MotorHemanth SaiNo ratings yet
- Mohammadi 2014Document9 pagesMohammadi 2014DrYs Kishore BabuNo ratings yet
- Article Ever V1Document9 pagesArticle Ever V1Angel MadridNo ratings yet
- Extending The Life of Transformer Units Through Maintenance Based On Insulation RevitalizationDocument7 pagesExtending The Life of Transformer Units Through Maintenance Based On Insulation RevitalizationbenlahnecheNo ratings yet
- Article IRSEC14 Back EolienDocument8 pagesArticle IRSEC14 Back Eoliensoumiya mekraziNo ratings yet
- MPPT PumpDocument13 pagesMPPT PumplinaNo ratings yet
- Wind Turbine Dynamic Models for Grid IntegrationDocument8 pagesWind Turbine Dynamic Models for Grid IntegrationAkhilesh PanwarNo ratings yet
- University of Engineering Dna Technology, Peshawar, PakistanDocument8 pagesUniversity of Engineering Dna Technology, Peshawar, PakistanWaqas AhmedNo ratings yet
- SERVODocument7 pagesSERVONicole RodriguezNo ratings yet
- Large Current Rectifiers State of The Art and Future TrendsDocument9 pagesLarge Current Rectifiers State of The Art and Future Trendstu2ha7No ratings yet
- Control Deslizante MPPTDocument7 pagesControl Deslizante MPPTH HhNo ratings yet
- Development of Aircraft Electric Starter-Generator System Based-On Active Rectification TechnologyDocument14 pagesDevelopment of Aircraft Electric Starter-Generator System Based-On Active Rectification Technologysezgin bayramNo ratings yet
- A New Single-Phase AC Voltage Converter With Voltage Buck Characteristics For Grid Voltage CompensationDocument19 pagesA New Single-Phase AC Voltage Converter With Voltage Buck Characteristics For Grid Voltage CompensationLê MinhNo ratings yet
- Induction Motors - Applications, Control and Fault Diagnostics (PDFDrive)Document383 pagesInduction Motors - Applications, Control and Fault Diagnostics (PDFDrive)Mohamed AmineNo ratings yet
- Lab 8 Electrical MotorDocument12 pagesLab 8 Electrical Motorazizul sharwaniNo ratings yet
- Modelling and simulating micro hydro powerDocument14 pagesModelling and simulating micro hydro powercontrol roomNo ratings yet
- 257 ArticleText 1348 1 10 20230331Document12 pages257 ArticleText 1348 1 10 20230331Iliace ArbaouiNo ratings yet
- System Identification and Modelling of Rotary Inverted PendulumDocument13 pagesSystem Identification and Modelling of Rotary Inverted PendulumVictor PassosNo ratings yet
- ICEE2013 Greety ProjectDocument8 pagesICEE2013 Greety ProjectTimothy EmmanuelNo ratings yet
- Hydroelectric Energy StandardsDocument3 pagesHydroelectric Energy StandardsFarooq BhuttaNo ratings yet
- ControlllDocument4 pagesControlllTsegaye HagosNo ratings yet
- AC Motors For Application in A Commercial Electric Vehicle: Designing AspectsDocument5 pagesAC Motors For Application in A Commercial Electric Vehicle: Designing Aspectsabde samadNo ratings yet
- FractionalorderslidingDocument15 pagesFractionalorderslidingAddisu TsehayNo ratings yet
- CVC Technologies, IncDocument1 pageCVC Technologies, IncYacine MokhtariNo ratings yet
- LV-NH300 DatasheetDocument2 pagesLV-NH300 DatasheetYacine MokhtariNo ratings yet
- Tinywow - PROEDI 1000 HWS + PW LOOP REVERSE OSMOSIS SYSTEM + DISTRIBUTION 2.2 - 5949721Document18 pagesTinywow - PROEDI 1000 HWS + PW LOOP REVERSE OSMOSIS SYSTEM + DISTRIBUTION 2.2 - 5949721Yacine MokhtariNo ratings yet
- LV-NH300 DatasheetDocument2 pagesLV-NH300 DatasheetYacine MokhtariNo ratings yet
- Quartz TubeDocument2 pagesQuartz TubeYacine MokhtariNo ratings yet
- Smart Glasses and Augmented Reality for Maintenance 4.0Document6 pagesSmart Glasses and Augmented Reality for Maintenance 4.0Yacine MokhtariNo ratings yet
- Liste Des FiltresDocument6 pagesListe Des FiltresYacine MokhtariNo ratings yet
- Maintenance Techniques for Industry 4.0: Examining Suitability of Popular MethodsDocument12 pagesMaintenance Techniques for Industry 4.0: Examining Suitability of Popular MethodsYacine MokhtariNo ratings yet
- Artificial Intelligence Integrated Fractional Order Control of Doubly Fed Induction Generator Based Wind Energy SystemDocument17 pagesArtificial Intelligence Integrated Fractional Order Control of Doubly Fed Induction Generator Based Wind Energy SystemYacine MokhtariNo ratings yet
- Fuzzy Logic Control of Doubly Fed InductDocument10 pagesFuzzy Logic Control of Doubly Fed InductYacine MokhtariNo ratings yet
- Categorie A+Document33 pagesCategorie A+TA RA GUNo ratings yet
- Art of The Pid-Aiche-Rbt11-15-19Document94 pagesArt of The Pid-Aiche-Rbt11-15-19Yacine MokhtariNo ratings yet
- Insulating Coatings For Electrical Steels by Composition, Relative Insulating Ability and ApplicationDocument4 pagesInsulating Coatings For Electrical Steels by Composition, Relative Insulating Ability and ApplicationjalilemadiNo ratings yet
- ASK Multisim SimulationDocument2 pagesASK Multisim SimulationDhea Ayu AnggrainiNo ratings yet
- L1710S (L1710sm-Al - R, Au - R, Ad - R, Ag - R) CL-61Document18 pagesL1710S (L1710sm-Al - R, Au - R, Ad - R, Ag - R) CL-61Deki PericNo ratings yet
- Adfd1820 3333B XDMDocument3 pagesAdfd1820 3333B XDMDavid Angulo EsguerraNo ratings yet
- Merk GE E-Catalog Specification for OEC Brivo 785 X-Ray GeneratorDocument2 pagesMerk GE E-Catalog Specification for OEC Brivo 785 X-Ray GeneratorNgoc Hung VuNo ratings yet
- Lenze 8200 Technical ManualDocument209 pagesLenze 8200 Technical ManualBilal AyubNo ratings yet
- RIT Lab Manual MCMPDocument203 pagesRIT Lab Manual MCMPMaheswaran UmaiyorupaganNo ratings yet
- EECE 459 Optoelectronics Exam QuestionsDocument2 pagesEECE 459 Optoelectronics Exam QuestionsNishat Farha SharmiNo ratings yet
- 829683741Document148 pages829683741Anil Kumar SinghNo ratings yet
- 31025882-MA5200F Technical Manual V1.70Document105 pages31025882-MA5200F Technical Manual V1.70SamuelNo ratings yet
- Smart Texture Magnification Filtering PDFDocument10 pagesSmart Texture Magnification Filtering PDFqweman9669No ratings yet
- 3G Access Power Solutions DC Power SystemsDocument2 pages3G Access Power Solutions DC Power SystemsgargmanishgargNo ratings yet
- 9701 w09 Ms 41Document8 pages9701 w09 Ms 41Hubbak KhanNo ratings yet
- 250XWE0000 (22 - 09 - 2016) MaximDocument201 pages250XWE0000 (22 - 09 - 2016) MaximcristiNo ratings yet
- Activated script manipulates numbers on websiteDocument4 pagesActivated script manipulates numbers on websiteJosgenda ClatituaNo ratings yet
- Service Manual Trucks: Fault Codes Body Builder Control Unit FL, FeDocument34 pagesService Manual Trucks: Fault Codes Body Builder Control Unit FL, FeArena CarrilloNo ratings yet
- SECTION 16340 Medium Voltage Switching and Protection Assemblies Rev 0Document38 pagesSECTION 16340 Medium Voltage Switching and Protection Assemblies Rev 0Filopimin ParaskevopoulosNo ratings yet
- Mrs.v.uma Digital System Design LABDocument70 pagesMrs.v.uma Digital System Design LABRutuja KakadeNo ratings yet
- Simple Autorange Capacitor Tester / Capacitance Meter With Arduino and by HandDocument7 pagesSimple Autorange Capacitor Tester / Capacitance Meter With Arduino and by HandOussama LabsailiNo ratings yet
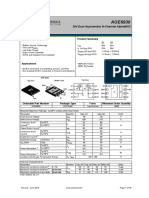
- General Description Product Summary: 30V Dual Asymmetric N-Channel AlphamosDocument10 pagesGeneral Description Product Summary: 30V Dual Asymmetric N-Channel AlphamosSomendra SinghNo ratings yet
- Playmates Tricorder Upgrade Instruction Manual-2020-01a (1)Document28 pagesPlaymates Tricorder Upgrade Instruction Manual-2020-01a (1)Rodger WeirNo ratings yet
- Deh P980BT P9800BT P9850BTDocument122 pagesDeh P980BT P9800BT P9850BTLasertech MódulosNo ratings yet
- Counter, Shifts and DecoderDocument20 pagesCounter, Shifts and DecoderLuís Ki-llahNo ratings yet
- Power Supply Conditioner: Pulsar CTDocument2 pagesPower Supply Conditioner: Pulsar CTAmper ProiectNo ratings yet
- ECE-E434 Digital Electronics: Lectures 13: Memory Circuits Instructor: Pouya Dianat Nov 7 2017Document19 pagesECE-E434 Digital Electronics: Lectures 13: Memory Circuits Instructor: Pouya Dianat Nov 7 2017Phuoc VuNo ratings yet
- ACTAtek3 Brochure v1.8Document2 pagesACTAtek3 Brochure v1.8Aurangzeb MuftiNo ratings yet
- Charging System Technique: Wireless Switched SmartDocument4 pagesCharging System Technique: Wireless Switched SmartHamza HebNo ratings yet
- Digital Dual-Axis Line-Of-sight Los DefensetechsDocument2 pagesDigital Dual-Axis Line-Of-sight Los DefensetechsdefensetechsNo ratings yet