You might also like
- Jane Street Capital InterviewDocument6 pagesJane Street Capital Interviewhc87100% (10)
- Gibbons Solution Problem Set 1.5 1.7 & 1. 8Document8 pagesGibbons Solution Problem Set 1.5 1.7 & 1. 8senopee100% (2)
- Unofficial Solutions Manual To R.A Gibbon's A Primer in Game TheoryDocument36 pagesUnofficial Solutions Manual To R.A Gibbon's A Primer in Game TheorySumit Sharma83% (23)
- Ben Roberts Equity ModelDocument10 pagesBen Roberts Equity ModelRobin CarterNo ratings yet
- Reversi in JavaDocument47 pagesReversi in JavaibaldazarNo ratings yet
- Blackstone Fortress Escalation - DatasheetsDocument8 pagesBlackstone Fortress Escalation - DatasheetsVincent Grangé-Pradéras0% (1)
- OriroboDocument123 pagesOriroboVincent Grangé-Pradéras100% (2)
- Us 1633228Document8 pagesUs 1633228Vincent Grangé-PradérasNo ratings yet
- Game Playing in Artificial IntelligenceDocument12 pagesGame Playing in Artificial IntelligencedevitoshNo ratings yet
- T21-86 AI Exp6Document5 pagesT21-86 AI Exp6Gaurang PatyaneNo ratings yet
- Adversial SearchDocument39 pagesAdversial SearchIM AM INEVITABLENo ratings yet
- Game Playing in Artificial IntelligenceDocument17 pagesGame Playing in Artificial IntelligenceTavleen KaurNo ratings yet
- 15.053 Tuesday, March 20: 2-Person 0-Sum (Or Constant Sum) Game TheoryDocument36 pages15.053 Tuesday, March 20: 2-Person 0-Sum (Or Constant Sum) Game TheoryEhsan SpencerNo ratings yet
- A Chess-Playing Computer ProgramDocument13 pagesA Chess-Playing Computer ProgramLuis MiglioreroNo ratings yet
- Sol 7Document5 pagesSol 7sfaisalaliuitNo ratings yet
- Two Armed Bandit Coursera - RMDDocument6 pagesTwo Armed Bandit Coursera - RMDNikhar KavdiaNo ratings yet
- The Independent Chip Model and Risk AversionDocument11 pagesThe Independent Chip Model and Risk AversionEddie Francis ZamoraNo ratings yet
- Playing Tic-Tac-Toe Game Using Model CheckingDocument7 pagesPlaying Tic-Tac-Toe Game Using Model CheckingTaree NeeNo ratings yet
- Minimax Algorithm in Game Theory - Set 2 (Introduction To Evaluation Function)Document4 pagesMinimax Algorithm in Game Theory - Set 2 (Introduction To Evaluation Function)AnonymousNo ratings yet
- Hold Up Game and Many More Extensive FormDocument46 pagesHold Up Game and Many More Extensive FormAshutosh KumarNo ratings yet
- Carnival ProjectDocument16 pagesCarnival Projectapi-397509742No ratings yet
- Documentation of TIK TAK TOE AI GameDocument21 pagesDocumentation of TIK TAK TOE AI GameFaisal ShehzadNo ratings yet
- Game PlayingDocument8 pagesGame PlayingStephen SalNo ratings yet
- Msc. in Economics Games & Contract Theory: Correct Answers: 0.5 Pts. Wrong Answers: - 0.25 Pts. (Document11 pagesMsc. in Economics Games & Contract Theory: Correct Answers: 0.5 Pts. Wrong Answers: - 0.25 Pts. (padrefloNo ratings yet
- Unit III AIDocument38 pagesUnit III AIRutuja Pimpalkhare100% (1)
- 14.12 Game Theory Lecture Notes Lectures 7-9: 1 Backwards InductionDocument12 pages14.12 Game Theory Lecture Notes Lectures 7-9: 1 Backwards Inductiongd3000No ratings yet
- csd311 ProjectDocument11 pagescsd311 Project298amanNo ratings yet
- How To Gamble If You MustDocument23 pagesHow To Gamble If You Mustsamuel_santaNo ratings yet
- Unit - 2Document9 pagesUnit - 2298hrqr66nNo ratings yet
- 02F Slides11Document17 pages02F Slides11gd3000No ratings yet
- Game TheoryDocument27 pagesGame TheoryPavitra PatiNo ratings yet
- Social Engineering: Theory and Practice: Bart Massey (PO8) March 23, 1997 (Edited May 23, 2011)Document11 pagesSocial Engineering: Theory and Practice: Bart Massey (PO8) March 23, 1997 (Edited May 23, 2011)iuliannitescu4817No ratings yet
- Mod 5Document5 pagesMod 5Abhishek0001No ratings yet
- 5 PDFDocument4 pages5 PDFSlavny TypekNo ratings yet
- Krause Satawa Carnivalproject 10bDocument11 pagesKrause Satawa Carnivalproject 10bapi-280692584No ratings yet
- Gameplaying Group 1Document13 pagesGameplaying Group 1mmrsajNo ratings yet
- AI Othello: Mick G.D. Remmerswaal April 23, 2020Document35 pagesAI Othello: Mick G.D. Remmerswaal April 23, 2020Mick RemmerswaalNo ratings yet
- Game Theory Group AssignmentDocument7 pagesGame Theory Group Assignmentandualem ayeleNo ratings yet
- Carnival ProjectDocument16 pagesCarnival Projectapi-281623170No ratings yet
- Game Playing: MIN-MAX SearchDocument6 pagesGame Playing: MIN-MAX Searchanon_565693848No ratings yet
- Game Theory: Strategies Selected by The AdversariesDocument54 pagesGame Theory: Strategies Selected by The AdversariesPotnuru VinayNo ratings yet
- Information System Course: Artificial Intelligency (AI) : DepartementDocument28 pagesInformation System Course: Artificial Intelligency (AI) : DepartementChala GetaNo ratings yet
- Game Theory: By: Purvi R. ChaudharyDocument28 pagesGame Theory: By: Purvi R. ChaudharyPurvi Chaudhary100% (1)
- Game TheoryDocument75 pagesGame TheoryShalini MustalaNo ratings yet
- Game TheoryDocument30 pagesGame Theorytrillion50% (1)
- Tetris: A Heuristic Study: Using Height-Based Weighing Functions and Breadth-First Search Heuristics For Playing TetrisDocument24 pagesTetris: A Heuristic Study: Using Height-Based Weighing Functions and Breadth-First Search Heuristics For Playing Tetrisarsie minNo ratings yet
- The Kelly Betting System For Favorable GamesDocument8 pagesThe Kelly Betting System For Favorable GamesTimNo ratings yet
- 2003 AnsDocument4 pages2003 Ansunkn0wn6No ratings yet
- Nips2006 0688Document8 pagesNips2006 0688pindi05No ratings yet
- Game Theory NotesDocument60 pagesGame Theory NotesShakira JosephNo ratings yet
- Microeconomics II: Game Theory and Its ApplicationsDocument31 pagesMicroeconomics II: Game Theory and Its ApplicationsSaniya Siddhika Ahmed SyedNo ratings yet
- Yade FL KhobDocument47 pagesYade FL Khobsadeq behbehanianNo ratings yet
- AI A Z HandBookDocument12 pagesAI A Z HandBookEsteban Ignacio Melendez OsechasNo ratings yet
- Model A Tennis Match With ExcelDocument6 pagesModel A Tennis Match With ExcelimcoloradozNo ratings yet
- Elements of Slot Design 2nd EditionDocument32 pagesElements of Slot Design 2nd EditionRhaud100% (1)
- Probability, Decisions and Games: A Gentle Introduction using RFrom EverandProbability, Decisions and Games: A Gentle Introduction using RNo ratings yet
- Commanders InternationalDocument12 pagesCommanders InternationalVincent Grangé-PradérasNo ratings yet
- Naomiki Sato Origami Roses and Flowers PDFDocument90 pagesNaomiki Sato Origami Roses and Flowers PDFAnonymous XuxMEqNo ratings yet
- Custodian GuardDocument16 pagesCustodian GuardVincent Grangé-PradérasNo ratings yet
- Hagimori ListDocument1 pageHagimori ListVincent Grangé-PradérasNo ratings yet
- Dave Brill - CigarettesDocument4 pagesDave Brill - CigarettesVincent Grangé-PradérasNo ratings yet
- K. Cazin Des. 120,583: Filed March 20, 1940Document2 pagesK. Cazin Des. 120,583: Filed March 20, 1940Vincent Grangé-PradérasNo ratings yet
- 1,333,9 1 8,. ' Patented Mar. 16, 1920. V: M. HorieDocument3 pages1,333,9 1 8,. ' Patented Mar. 16, 1920. V: M. HorieVincent Grangé-PradérasNo ratings yet
- Instant Go SetDocument3 pagesInstant Go SetVincent Grangé-PradérasNo ratings yet
- Torsion TestDocument4 pagesTorsion TestankitsuchantiNo ratings yet
- 4-Dimensional Chern-Simons Theory and Integrable Field TheoriesDocument64 pages4-Dimensional Chern-Simons Theory and Integrable Field TheoriesPamela Catalán ContrerasNo ratings yet
- Diffusion Osmosis WSDocument4 pagesDiffusion Osmosis WSCamila ValerioNo ratings yet
- Unit 9 Determinants: StructureDocument25 pagesUnit 9 Determinants: StructureSajal KumarNo ratings yet
- Fuse Link CatalogueDocument32 pagesFuse Link CatalogueAnonymous dPNmMNcNo ratings yet
- Complex and LCD (PRATHAM) Solution - 416284Document8 pagesComplex and LCD (PRATHAM) Solution - 416284RNo ratings yet
- ميد رياضيات الترم الأولDocument20 pagesميد رياضيات الترم الأولLoly.No ratings yet
- EnjoyAlgorithms - Note - FollowDocument6 pagesEnjoyAlgorithms - Note - FollowOlusola TopNo ratings yet
- Process Control and InstrumentationDocument14 pagesProcess Control and InstrumentationSiddhant SinhaNo ratings yet
- Using NSD - A Practical Guide Hands On Track Session HND107 Lotusphere 2008 Presented By: Elliott Harden and Joe WallaceDocument48 pagesUsing NSD - A Practical Guide Hands On Track Session HND107 Lotusphere 2008 Presented By: Elliott Harden and Joe Wallaceporpatham0% (1)
- Stepping Motor Driver: BA6845FSDocument7 pagesStepping Motor Driver: BA6845FSsmnguyenNo ratings yet
- DL1100Document2 pagesDL1100Wong Wong WLNo ratings yet
- Disorders of Potassium: Dr. YabarowDocument43 pagesDisorders of Potassium: Dr. YabarowCabdiladif Ahmed McrfNo ratings yet
- EDS151 DB enDocument4 pagesEDS151 DB enNaveedNo ratings yet
- Z Rail Junction BoxDocument2 pagesZ Rail Junction BoxWenceslao CaminosNo ratings yet
- SSN SP EP 0004 B - 230kV GIS SpecificationDocument84 pagesSSN SP EP 0004 B - 230kV GIS SpecificationeitzzzzNo ratings yet
- Hamilton's PH Measurement GuideDocument5 pagesHamilton's PH Measurement GuideRamesh K NNo ratings yet
- Reflection ActivityDocument6 pagesReflection ActivityMarilyn LaquindanumNo ratings yet
- Group No. 4Document40 pagesGroup No. 4Zeeshan AshrafNo ratings yet
- Philippine and Asian MusicDocument4 pagesPhilippine and Asian MusicJuvie GargarNo ratings yet
- NEO Coolcam - Wall PlugDocument10 pagesNEO Coolcam - Wall Plugatianna.paschalNo ratings yet
- IDIPSYDocument22 pagesIDIPSYMd FaheemNo ratings yet
- Neural Network Based Rainfall Prediction SystemDocument6 pagesNeural Network Based Rainfall Prediction SystemBaranishankar100% (1)
- CVE 230. Lab Report 4 (Torsion Testing) .Document4 pagesCVE 230. Lab Report 4 (Torsion Testing) .Juan Villa100% (1)
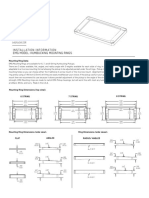
- Mounting Ring Instructions 0230-0289Document2 pagesMounting Ring Instructions 0230-0289Ernesto AmezcuaNo ratings yet
- FarDRIVE CONTROLER MANUELDocument61 pagesFarDRIVE CONTROLER MANUELOliver BocquetNo ratings yet
- Cyclic StressDocument12 pagesCyclic StressBeljun FloresNo ratings yet
- W&H - LinaDocument74 pagesW&H - LinaPreciosa SilvaNo ratings yet
- Exercises:: SolutionDocument21 pagesExercises:: Solutionhertzberg 1No ratings yet
- Manual CSD-CPD v2Document36 pagesManual CSD-CPD v2WongTatYuenNo ratings yet