You might also like
- Scanline Rendering: Exploring Visual Realism Through Scanline Rendering TechniquesFrom EverandScanline Rendering: Exploring Visual Realism Through Scanline Rendering TechniquesNo ratings yet
- Barraquand91 RPPDocument24 pagesBarraquand91 RPPArcher 010No ratings yet
- Metric Path PlanningDocument18 pagesMetric Path Planningtp5606No ratings yet
- Principles of Robot Autonomy I: Motion Planning I: Graph Search MethodsDocument33 pagesPrinciples of Robot Autonomy I: Motion Planning I: Graph Search MethodsratjerryNo ratings yet
- Path Planning For An Industrial Robotic ArmDocument7 pagesPath Planning For An Industrial Robotic ArmZahid IqbalNo ratings yet
- The MoveIt Motion Planning Framework Configuration For The IRI WAM RobotDocument8 pagesThe MoveIt Motion Planning Framework Configuration For The IRI WAM RobotfabromoNo ratings yet
- E190Q Lecture14 MotionPlanning PDFDocument72 pagesE190Q Lecture14 MotionPlanning PDFBara Abu ShaqraNo ratings yet
- Concepts in Robot Motion Planning - Path Planning MethodsDocument9 pagesConcepts in Robot Motion Planning - Path Planning MethodsAlex HatNo ratings yet
- Fully-Pipeline CORDIC-based FPGA Realization For A 3-DOF Hexapod-Leg Inverse Kinematics CalculationDocument6 pagesFully-Pipeline CORDIC-based FPGA Realization For A 3-DOF Hexapod-Leg Inverse Kinematics CalculationErick RodriguezNo ratings yet
- Sampling Based Robot Motion Planning: Dept. of Ece, Bgsit 2015page 1Document20 pagesSampling Based Robot Motion Planning: Dept. of Ece, Bgsit 2015page 1punithNo ratings yet
- Roadmap-Based Planning in Human-Robot Collaboration EnvironmentsDocument7 pagesRoadmap-Based Planning in Human-Robot Collaboration EnvironmentsZahid IqbalNo ratings yet
- Deep GaitDocument8 pagesDeep GaitGhanshyam s.nairNo ratings yet
- 10 Programming in RoboticsDocument41 pages10 Programming in RoboticsNimoNo ratings yet
- Implementation and Reconfiguration of Robot Operating System On Human Follower Transporter RobotDocument7 pagesImplementation and Reconfiguration of Robot Operating System On Human Follower Transporter RobotoubahaNo ratings yet
- Unit 3Document27 pagesUnit 3Radhamani VNo ratings yet
- A Study On Tangent Bug AlgorithmDocument3 pagesA Study On Tangent Bug AlgorithmkfuScribdNo ratings yet
- Open Foam SlidesDocument43 pagesOpen Foam SlidesjahidNo ratings yet
- WibdDocument39 pagesWibd204Kashish VermaF2No ratings yet
- Lab Task 4 RPODocument5 pagesLab Task 4 RPOUmair AzizNo ratings yet
- Robmech15 SBPLDocument7 pagesRobmech15 SBPLAlan PereiraNo ratings yet
- ROS-I Basic Developers Training - Session 2 PDFDocument45 pagesROS-I Basic Developers Training - Session 2 PDFblahNo ratings yet
- FluentDocument30 pagesFluentijaz fazilNo ratings yet
- CocaCola Doc2021Document18 pagesCocaCola Doc2021Usman Farooq ButtNo ratings yet
- 08 Trajectoryoptimization1 SlidesDocument15 pages08 Trajectoryoptimization1 SlidesBavantha UdugamaNo ratings yet
- CSE1002 Problem Solving With Object Oriented Programming LO 1 AC39Document7 pagesCSE1002 Problem Solving With Object Oriented Programming LO 1 AC39SPAM rohitNo ratings yet
- ROS-I Basic Developers Training (ROS2) - Session 2Document43 pagesROS-I Basic Developers Training (ROS2) - Session 2nhatduy.ctt1No ratings yet
- Teb - Local - Planner - ROS WikiDocument12 pagesTeb - Local - Planner - ROS WikiHarsha Ky354No ratings yet
- Fully-Pipelined CORDIC-based FPGA Realization For A 3-DOF Hexapod-Leg Inverse Kinematics CalculationDocument6 pagesFully-Pipelined CORDIC-based FPGA Realization For A 3-DOF Hexapod-Leg Inverse Kinematics CalculationErick RodriguezNo ratings yet
- Robot SimulatorsDocument29 pagesRobot SimulatorsHiệpEuclid100% (1)
- 090 Robot Trajectory Generation enDocument50 pages090 Robot Trajectory Generation enbaboiu electricNo ratings yet
- Code PDFDocument23 pagesCode PDFbessam123No ratings yet
- Big Data and Analytics and MapReduce 29052023 054155pmDocument35 pagesBig Data and Analytics and MapReduce 29052023 054155pmTalha MughalNo ratings yet
- How Computers Work: Subject PurposeDocument38 pagesHow Computers Work: Subject PurposeZammadNo ratings yet
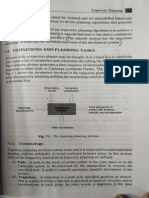
- Definitions and Planning Tasks: Tobegin With, A Trajectory Planner May Be Thought of As A Black Box To Which TheDocument7 pagesDefinitions and Planning Tasks: Tobegin With, A Trajectory Planner May Be Thought of As A Black Box To Which The20131A5327 KONDETI SHIVA NARASIMHANo ratings yet
- VLSI Architecture For Parallel Radix-4 CORDICDocument8 pagesVLSI Architecture For Parallel Radix-4 CORDICAnkur PatelNo ratings yet
- Xilinx TimingClosureDocument31 pagesXilinx TimingClosurehiperboreoatlantecNo ratings yet
- Auto Cad Daywise NWDocument2 pagesAuto Cad Daywise NWvishal kaleNo ratings yet
- Ece - Ijeceierd - All New 3Document11 pagesEce - Ijeceierd - All New 3global-marketin8184No ratings yet
- Davinci: A Cloud Computing Framework For Service Robots: Author Name: P.A.SathishkumarDocument6 pagesDavinci: A Cloud Computing Framework For Service Robots: Author Name: P.A.SathishkumarGayathri GayuNo ratings yet
- MapReduce OnlineDocument15 pagesMapReduce OnlineVyhxNo ratings yet
- Super Map Products&TechnologiesDocument20 pagesSuper Map Products&TechnologiesDeasyana Kusuma PratiwiNo ratings yet
- Multigpu Webinar: Day To Day RecipesDocument16 pagesMultigpu Webinar: Day To Day RecipesThermionNo ratings yet
- Motion Planning & Robot PlanningDocument98 pagesMotion Planning & Robot PlanningAshNo ratings yet
- He-Phan-Bo - Wyatt-Lloyd - L19-Big-Data - (Cuuduongthancong - Com)Document16 pagesHe-Phan-Bo - Wyatt-Lloyd - L19-Big-Data - (Cuuduongthancong - Com)Hiếu KhổngNo ratings yet
- Parth and Danny Robotics AIDocument6 pagesParth and Danny Robotics AIParth Pankaj TiwaryNo ratings yet
- Component-Level DesignDocument59 pagesComponent-Level Designelvis.sikapiNo ratings yet
- Java ProgramDocument367 pagesJava ProgramSilver Quill23No ratings yet
- EE-307 Fpga Based System Design: Lecture # 02Document35 pagesEE-307 Fpga Based System Design: Lecture # 02Muhammad AnasNo ratings yet
- IA010: Principles of Programming Languages: 9. ConcurrencyDocument46 pagesIA010: Principles of Programming Languages: 9. ConcurrencyLUCKY SINGHNo ratings yet
- Postgres DatabaseDocument29 pagesPostgres DatabaseErick PinenkaNo ratings yet
- Lec 5 - Sequential StructuresDocument9 pagesLec 5 - Sequential StructuresAbdulhalimNo ratings yet
- Sen-762 Advanced Big Data Analytics: MapreduceDocument46 pagesSen-762 Advanced Big Data Analytics: MapreduceبالیراجپوتNo ratings yet
- Unit 3 - Big Data TechnologiesDocument42 pagesUnit 3 - Big Data Technologiesprakash NNo ratings yet
- Full StackDocument1 pageFull StackWitor SantosNo ratings yet
- Trajectory Planning: Robotics 1Document30 pagesTrajectory Planning: Robotics 1KOTIKA SOMA RAJUNo ratings yet
- LP-1 Lab ManualDocument31 pagesLP-1 Lab ManualGamer studioNo ratings yet
- Syllabus: Robotics Software Engineer Nanodegree ProgramDocument7 pagesSyllabus: Robotics Software Engineer Nanodegree ProgramKamal NathanNo ratings yet
- Mobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement LearningDocument8 pagesMobile Robot Path Planning in Dynamic Environments Through Globally Guided Reinforcement LearningVarun AgarwalNo ratings yet
- Big Data Unit 2 AKTU NotesDocument63 pagesBig Data Unit 2 AKTU Notesabhijitraj229No ratings yet
- Module 01 - IntroductionDocument37 pagesModule 01 - Introductionneelesh2k5No ratings yet
- BoeingDocument1 pageBoeingJohnNo ratings yet
- Foundations of Project ManagementDocument3 pagesFoundations of Project ManagementJohnNo ratings yet
- Project KickOffDocument3 pagesProject KickOffJohnNo ratings yet
- CarsDocument2 pagesCarsJohnNo ratings yet
- Schneider BOM - Sheet1Document1 pageSchneider BOM - Sheet1JohnNo ratings yet
- DaNews-DaNews 185Document148 pagesDaNews-DaNews 185JohnNo ratings yet
- Melsoft FR Configurator Sw3 Vf1Document8 pagesMelsoft FR Configurator Sw3 Vf1mo_be81No ratings yet
- Electrical Circuits - 5Document4 pagesElectrical Circuits - 5KumarNo ratings yet
- Pitcairn-Background Concentration of GoldDocument9 pagesPitcairn-Background Concentration of GoldAmanda ThomNo ratings yet
- Phys101 Spring 2012-13 OutlineDocument2 pagesPhys101 Spring 2012-13 OutlineemuphychemNo ratings yet
- LESSON 9 Solution StoichiometryDocument10 pagesLESSON 9 Solution StoichiometryMaria Christine Joy MasilangNo ratings yet
- First PagesDocument11 pagesFirst PagesEswar KarriNo ratings yet
- CFP Incas 16092021 V2Document1 pageCFP Incas 16092021 V2VICTOR ROY CACERES HUAMANNo ratings yet
- 9080 Optimass 7300 Flowmeter ManualDocument146 pages9080 Optimass 7300 Flowmeter ManualMaruti HuleNo ratings yet
- D220x300 Spec Sheet 201507Document2 pagesD220x300 Spec Sheet 201507Sendy IslamiNo ratings yet
- Modeling of A Gasifier Using Cycle-Tempo For SOFC ApplicationsDocument8 pagesModeling of A Gasifier Using Cycle-Tempo For SOFC ApplicationsFerdy KurniawanNo ratings yet
- Final Step-A Answer KeyDocument7 pagesFinal Step-A Answer KeyVansh Jain100% (1)
- Platinum JuniorDocument87 pagesPlatinum Juniorjimm_jNo ratings yet
- SCINT 9181 4f LowendDocument152 pagesSCINT 9181 4f LowendImam BuchairiNo ratings yet
- Geometry Class 6 Final ExamDocument4 pagesGeometry Class 6 Final ExamTanzimNo ratings yet
- LP - Multiplication of IntegersDocument4 pagesLP - Multiplication of IntegersRowena FanuncioNo ratings yet
- Offset ProblemiDocument34 pagesOffset ProblemiMica IvanovicNo ratings yet
- A Jacobi Collocation Method For Solving Nonlinear Burgers-Type EquationsDocument13 pagesA Jacobi Collocation Method For Solving Nonlinear Burgers-Type EquationsEduardo SandovalNo ratings yet
- U2000 - General PunctuationDocument6 pagesU2000 - General PunctuationSándor NagyNo ratings yet
- Reciprocating Compressor: Semi-HermeticDocument12 pagesReciprocating Compressor: Semi-HermeticGosai MohamedNo ratings yet
- Scott Shenker Fundamental Design Issues of Future InternetDocument13 pagesScott Shenker Fundamental Design Issues of Future InternetSarah KhaleelNo ratings yet
- T014108e PDFDocument5 pagesT014108e PDFSilvester KolicNo ratings yet
- Titrimetric Analysis (Acid-Base)Document4 pagesTitrimetric Analysis (Acid-Base)anon_853848256No ratings yet
- Mock Test-4Document19 pagesMock Test-4Bhavish ParkalaNo ratings yet
- Tfa Collector Do CV 121260Document67 pagesTfa Collector Do CV 121260Sujeewa Chathurani DiasNo ratings yet
- A Case StudyDocument10 pagesA Case StudynourooziNo ratings yet
- Lab 1 Introduction To Linux Environment and C CompilerDocument6 pagesLab 1 Introduction To Linux Environment and C CompilerRabiatul AdawiahNo ratings yet
- ZF Tiratron Catalog Rev 0 PDFDocument28 pagesZF Tiratron Catalog Rev 0 PDFNaracu FabianNo ratings yet
- Alcatel 2033 2063 Users Instruction ManualDocument30 pagesAlcatel 2033 2063 Users Instruction ManualpizandolaNo ratings yet
- Rabindranath Though On ScienceDocument9 pagesRabindranath Though On ScienceMatiyar Rahaman KhanNo ratings yet
- 13003br PDFDocument3 pages13003br PDFFikri Syahir BachmidNo ratings yet