You might also like
- L28-32H GenSet TierII PDFDocument824 pagesL28-32H GenSet TierII PDFHelder Pinto100% (1)
- IBM Data Science CapstoneDocument51 pagesIBM Data Science CapstonePeter Quoc88% (8)
- Applied Dynamics PDFDocument862 pagesApplied Dynamics PDFLeonardo Mereles100% (1)
- 24 BitcoinDocument36 pages24 Bitcoind0c0ngthanhNo ratings yet
- 049 Hadoop Commands Reference Guide.Document3 pages049 Hadoop Commands Reference Guide.vaasu1No ratings yet
- PDFDocument1 pagePDFdhaktodesatyajitNo ratings yet
- Nonlinear Programming PDFDocument224 pagesNonlinear Programming PDFLina Angarita HerreraNo ratings yet
- Railway Engineering NotesDocument18 pagesRailway Engineering Notesskalema34100% (1)
- Spatial FilteringDocument50 pagesSpatial FilteringeduhelloNo ratings yet
- Lecture 2 PDFDocument38 pagesLecture 2 PDFAli KassabNo ratings yet
- Cp467 12 Lecture17 SegmentationDocument66 pagesCp467 12 Lecture17 Segmentationsatyastriver1518No ratings yet
- Image Segmentation-Upload1Document41 pagesImage Segmentation-Upload1Monark MehtaNo ratings yet
- Image Enhancement (Spatial Domain Filters)Document26 pagesImage Enhancement (Spatial Domain Filters)hafiz_zameerNo ratings yet
- Lecture2 Basic Relationship Between PixelsDocument16 pagesLecture2 Basic Relationship Between PixelsfuxailNo ratings yet
- Module 5 NoteDocument48 pagesModule 5 NoteRohitNo ratings yet
- Unit ViDocument77 pagesUnit ViVivek SharmaNo ratings yet
- 13 - Routing Algorithms: Network Layer 4-1Document20 pages13 - Routing Algorithms: Network Layer 4-1Daniyal AsifNo ratings yet
- Lecture 4: Non-Linear Filters & Image Compression: B14 Image Analysis Michaelmas 2014 A. ZissermanDocument54 pagesLecture 4: Non-Linear Filters & Image Compression: B14 Image Analysis Michaelmas 2014 A. ZissermanybNo ratings yet
- Today's Lecture: Repetition and Refinement of Image BasicsDocument36 pagesToday's Lecture: Repetition and Refinement of Image BasicsAli KassabNo ratings yet
- Edge Detection: Phil Mlsna, PH.DDocument34 pagesEdge Detection: Phil Mlsna, PH.Dعلي كامل الاسديNo ratings yet
- Static Program Analysis: Part 4 - Flow Sensitive AnalysesDocument42 pagesStatic Program Analysis: Part 4 - Flow Sensitive AnalysesphtcostaNo ratings yet
- 10 Image Segmentation April 2019Document20 pages10 Image Segmentation April 2019Eng DlovanNo ratings yet
- 06 - CN-Network Layer - Part IIDocument52 pages06 - CN-Network Layer - Part IIP NischalaNo ratings yet
- SMA 1117 - Lec 1Document37 pagesSMA 1117 - Lec 1LucasNo ratings yet
- Ch10+-+Other Public-Key CryptosystemsDocument31 pagesCh10+-+Other Public-Key CryptosystemsSawsan TawfiqNo ratings yet
- Lecture 3Document37 pagesLecture 3bedline.salesNo ratings yet
- Routing Algorithms and Routing in The Internet: Network Layer 4-1Document44 pagesRouting Algorithms and Routing in The Internet: Network Layer 4-1Abhishek RegmiNo ratings yet
- Lec2 LTI B PDFDocument40 pagesLec2 LTI B PDFIrum Nausheen Lecturer - FETNo ratings yet
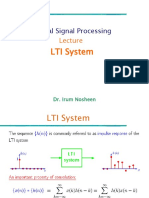
- LTI System: Digital Signal ProcessingDocument40 pagesLTI System: Digital Signal ProcessingIrum Nausheen Lecturer - FETNo ratings yet
- R Matrix AnalysisDocument34 pagesR Matrix AnalysisArkadeep PalNo ratings yet
- Network Layer Part II & III: Routing Algorithms Refer To Chapter 4 of The TextbookDocument54 pagesNetwork Layer Part II & III: Routing Algorithms Refer To Chapter 4 of The TextbookAHWSNo ratings yet
- Chapter II: Reciprocal Lattice: Read Chapter 2 of KittelDocument39 pagesChapter II: Reciprocal Lattice: Read Chapter 2 of KittelEdson Jansen MirandaNo ratings yet
- Color Filter Array Demosaicking Using High-Order Interpolation Techniques With A Weighted Median Filter For Sharp Color Edge PreservationDocument44 pagesColor Filter Array Demosaicking Using High-Order Interpolation Techniques With A Weighted Median Filter For Sharp Color Edge PreservationAjithRao MadarapuNo ratings yet
- Digital - Image - Processing - 2 Lec 1 PDFDocument56 pagesDigital - Image - Processing - 2 Lec 1 PDFsnake teethNo ratings yet
- Convolutional Neural NetworksDocument55 pagesConvolutional Neural NetworksaliNo ratings yet
- Robotics1 MidTerm 2019-20 19.11.29Document9 pagesRobotics1 MidTerm 2019-20 19.11.29Ammar BendjeddouNo ratings yet
- 30-07-2022 Unit2bDocument66 pages30-07-2022 Unit2bSarnithaNo ratings yet
- NLP SlidesDocument201 pagesNLP Slidesadarsh2dayNo ratings yet
- Solutions To Problems On VolumesDocument2 pagesSolutions To Problems On VolumesteachopensourceNo ratings yet
- Cp467 12 Lecture6 SharpeningDocument33 pagesCp467 12 Lecture6 SharpeningKalirajan KNo ratings yet
- Lecture 3: Directed Graphical Models and Latent Variables Based On Slides byDocument48 pagesLecture 3: Directed Graphical Models and Latent Variables Based On Slides byRohit PandeyNo ratings yet
- Module 3 Center of GravityDocument16 pagesModule 3 Center of GravitySandeepNo ratings yet
- Basic ConceptsDocument14 pagesBasic ConceptsFareed NaouriNo ratings yet
- Finite Element Method: Winter 2020Document38 pagesFinite Element Method: Winter 2020Ammar etmanNo ratings yet
- Lecture 4-Image - Enhancement in Spatial FilteringDocument25 pagesLecture 4-Image - Enhancement in Spatial FilteringRokan UddinNo ratings yet
- Centroids Formula PDFDocument38 pagesCentroids Formula PDFwelwelNo ratings yet
- Lecture 212Document14 pagesLecture 212PortorNo ratings yet
- Lecture 12&13Document89 pagesLecture 12&13QUANG ANH B18DCCN034 PHẠMNo ratings yet
- Outline of Next 2 Lectures: Matrix Computations: Direct Methods IDocument16 pagesOutline of Next 2 Lectures: Matrix Computations: Direct Methods IitrialNo ratings yet
- WINSEM2020-21 CSE4019 ETH VL2020210504006 Reference Material II 23-Mar-2021 Image SegmentationDocument25 pagesWINSEM2020-21 CSE4019 ETH VL2020210504006 Reference Material II 23-Mar-2021 Image SegmentationMajety S LskshmiNo ratings yet
- Lecture5 Data CompressionDocument20 pagesLecture5 Data CompressionAbdo ANNo ratings yet
- Network Layer Control Plane: Chapter GoalsDocument49 pagesNetwork Layer Control Plane: Chapter Goalsetetu weldeNo ratings yet
- Algorithm Lec10Document61 pagesAlgorithm Lec10Habiba HegazyNo ratings yet
- Detectors and DescriptorsDocument71 pagesDetectors and DescriptorsRishabh BahetiNo ratings yet
- FemsahpefuncDocument25 pagesFemsahpefuncshmyeNo ratings yet
- Chapter 2 Pixel RelationDocument33 pagesChapter 2 Pixel RelationSaikarNo ratings yet
- Eng4Bf3 Medical Image Processing: Wavelet and Multiresolution ProcessingDocument49 pagesEng4Bf3 Medical Image Processing: Wavelet and Multiresolution ProcessingSelva KumarNo ratings yet
- D1LB4 Rocca PDFDocument44 pagesD1LB4 Rocca PDFViol TailerNo ratings yet
- Chapter - 4mk23 - Section 45 Routing BasicsDocument19 pagesChapter - 4mk23 - Section 45 Routing Basicsjack.johnson.jj1234No ratings yet
- Concepts in Edge DetectionDocument32 pagesConcepts in Edge DetectionPiyush TrivediNo ratings yet
- Unicast Routing Protocols For Wireless Ad Hoc NetworksDocument49 pagesUnicast Routing Protocols For Wireless Ad Hoc NetworksRaja MadhuvanthiNo ratings yet
- Chapter 4: Network LayerDocument30 pagesChapter 4: Network LayerLamone KeliNo ratings yet
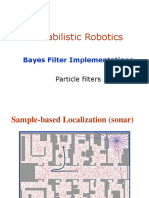
- Particle FilterDocument64 pagesParticle FilterJoseNo ratings yet
- Truncation Effects in SENSE Reconstruction: Lei Yuan, Leslie Ying, Dan Xu, Zhi-Pei Liang 4Document8 pagesTruncation Effects in SENSE Reconstruction: Lei Yuan, Leslie Ying, Dan Xu, Zhi-Pei Liang 4Edward Ventura BarrientosNo ratings yet
- Integration of One-forms on P-adic Analytic Spaces. (AM-162)From EverandIntegration of One-forms on P-adic Analytic Spaces. (AM-162)No ratings yet
- DBMS Practice QueestionsDocument2 pagesDBMS Practice QueestionsAbhibhava Bhatt VIII [E] 4No ratings yet
- AutoCAD - Modify ToolbarDocument18 pagesAutoCAD - Modify ToolbarMarcusNo ratings yet
- Notes of CH 6 Animal Tissues Class 9th ScienceDocument11 pagesNotes of CH 6 Animal Tissues Class 9th ScienceSingh JNo ratings yet
- Report Builder ENGDocument94 pagesReport Builder ENGfran reyNo ratings yet
- Comparative Study of Occlusal Contact Marking Indicators: Tanya P. BozhkovaDocument5 pagesComparative Study of Occlusal Contact Marking Indicators: Tanya P. BozhkovaMrinmayee ThakurNo ratings yet
- ReportDocument1 pageReportDrew DacanayNo ratings yet
- JCrenshaw ImplementingCRCsDocument17 pagesJCrenshaw ImplementingCRCsspyeagleNo ratings yet
- 02a-2 V-Can2 Xlrteh4300g033850Document1 page02a-2 V-Can2 Xlrteh4300g033850Daniel PricopNo ratings yet
- Information Data and ProcessingDocument10 pagesInformation Data and ProcessingarshdeepsinghdhingraNo ratings yet
- Why Might Some People Regard Science As The Supreme Form of All KnowledgeDocument4 pagesWhy Might Some People Regard Science As The Supreme Form of All KnowledgexxxsyedxxNo ratings yet
- Mariners' Polytechnic Colleges Foundation of Canaman, Camarines SurDocument4 pagesMariners' Polytechnic Colleges Foundation of Canaman, Camarines SurKristian-Emman SarateNo ratings yet
- Excavators 1Document27 pagesExcavators 1Gold CubeNo ratings yet
- 06a Consolidation and Settlement in ClayDocument10 pages06a Consolidation and Settlement in ClayAlly KhooNo ratings yet
- Sony HCD Zx30avDocument80 pagesSony HCD Zx30avrrobles8777No ratings yet
- Jimma Institute of Technology Faculty of Mechanical EngineeringDocument38 pagesJimma Institute of Technology Faculty of Mechanical EngineeringIsmail Ibn BehailuNo ratings yet
- Evolution of C-Si: PV Cell TechnologiesDocument52 pagesEvolution of C-Si: PV Cell TechnologiesFábio VelôzoNo ratings yet
- Hya3-6 M6 InsDocument3 pagesHya3-6 M6 InssuhuanajNo ratings yet
- Solar and Lunar Eclipses1-1Document17 pagesSolar and Lunar Eclipses1-1THERESA JNo ratings yet
- Markov ChainDocument16 pagesMarkov Chainnaveenk903No ratings yet
- Module 1Document45 pagesModule 1Leigh Kyster BenlotNo ratings yet
- LAB REPORT BUCKLING OF STRUTS (Reference)Document13 pagesLAB REPORT BUCKLING OF STRUTS (Reference)jajenNo ratings yet
- Class 4 Imo Wkbsol e Book PDFDocument4 pagesClass 4 Imo Wkbsol e Book PDFHiral BhattNo ratings yet
- The Basics of Electric Heat Trace TechnologyDocument8 pagesThe Basics of Electric Heat Trace Technologyvladimir rosas ayalaNo ratings yet