You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Random Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101From EverandRandom Fourier Series with Applications to Harmonic Analysis. (AM-101), Volume 101No ratings yet
- Digital Signal Processing: By: Assoc. Prof. Dr. Erhan A. İnce Electrical and Electronic Engineering Dept. SPRING 2016Document19 pagesDigital Signal Processing: By: Assoc. Prof. Dr. Erhan A. İnce Electrical and Electronic Engineering Dept. SPRING 2016ramanaidu1No ratings yet
- Solution of Linear Constant-Coefficient Difference EquationsDocument4 pagesSolution of Linear Constant-Coefficient Difference EquationsMnshNo ratings yet
- Chapter 3: Linear Difference EquationsDocument7 pagesChapter 3: Linear Difference EquationsMnshNo ratings yet
- Resit Exam Difference and Differential Equations 2015-2016: Monday, March 21st, 2016, 14:00-17:00 HoursDocument11 pagesResit Exam Difference and Differential Equations 2015-2016: Monday, March 21st, 2016, 14:00-17:00 HoursVarun VenkateshNo ratings yet
- Picard Higher Order SuperpositionDocument12 pagesPicard Higher Order SuperpositionTeferiNo ratings yet
- (Saber Elaydi) An Introduction To Difference EquationDocument4 pages(Saber Elaydi) An Introduction To Difference EquationAllan FerrazNo ratings yet
- Difference EquationsDocument5 pagesDifference EquationsMnNo ratings yet
- Soliton Solutions Obtained From The Du NG Equation: Int. J. Contemp. Math. Sciences, Vol. 2, 2007, No. 7, 319 - 331Document13 pagesSoliton Solutions Obtained From The Du NG Equation: Int. J. Contemp. Math. Sciences, Vol. 2, 2007, No. 7, 319 - 331Habib RahmanNo ratings yet
- MT205 Tutorial 2 2018 MarchDocument2 pagesMT205 Tutorial 2 2018 Marchkundayi shavaNo ratings yet
- Solutions of A PDEDocument8 pagesSolutions of A PDEManpreet SinghNo ratings yet
- Classification and Analysis of Ordinary Differential Equations (ODEsDocument5 pagesClassification and Analysis of Ordinary Differential Equations (ODEsfree_progNo ratings yet
- Differential Equations (MA 1150) Overview and Higher Order Linear DEDocument32 pagesDifferential Equations (MA 1150) Overview and Higher Order Linear DEMansi NanavatiNo ratings yet
- 19 General Solutions of Linear EquationDocument2 pages19 General Solutions of Linear EquationRL EstonaNo ratings yet
- Iit RPR Ma201Document2 pagesIit RPR Ma201atggregNo ratings yet
- EE605 Department of Electrical Engineering Exercise Set-7 2019-20-IDocument4 pagesEE605 Department of Electrical Engineering Exercise Set-7 2019-20-IRahz SinghNo ratings yet
- Integer Algorithms To Solve Linear Equations and SystemsDocument57 pagesInteger Algorithms To Solve Linear Equations and SystemsIlieCraciunNo ratings yet
- Math 333 Higher Order Linear Differential Equations: Kenyon College Paquind@kenyon - EduDocument4 pagesMath 333 Higher Order Linear Differential Equations: Kenyon College Paquind@kenyon - EduDrazen Emir Lim-Barraca Bernardo-LegaspiNo ratings yet
- Higher Order Linear Odes: Theory: Department of Mathematics Iit GuwahatiDocument17 pagesHigher Order Linear Odes: Theory: Department of Mathematics Iit GuwahatiakshayNo ratings yet
- Assignment - 4Document2 pagesAssignment - 4Vikas KushwahaNo ratings yet
- Y Xy Ky: GivenDocument6 pagesY Xy Ky: GivenNaveen GuptaNo ratings yet
- Oscillation Criteria For Systems of Difference Equations With Variable Coe CientsDocument7 pagesOscillation Criteria For Systems of Difference Equations With Variable Coe CientsLuis Alberto FuentesNo ratings yet
- ECEN 314: Signals and SystemsDocument7 pagesECEN 314: Signals and SystemsAbdul AhadNo ratings yet
- Higher Order Differential EquationsDocument7 pagesHigher Order Differential EquationsAmeer AbbasNo ratings yet
- Chapter 1 Second Order ODEDocument44 pagesChapter 1 Second Order ODELukman AhmedNo ratings yet
- Some Wronskian SDocument7 pagesSome Wronskian SManish AcharyyaNo ratings yet
- Differential equations explainedDocument27 pagesDifferential equations explainedShyam AwalNo ratings yet
- O.D.E. Parallel Test 2. (Assignment)Document3 pagesO.D.E. Parallel Test 2. (Assignment)simbachipsyNo ratings yet
- FFT (Fast Fourier Transform)Document20 pagesFFT (Fast Fourier Transform)Hemant Sudhir WavhalNo ratings yet
- B1c283a8 E24c 4b88 8311 Bea2813bc8eDocument16 pagesB1c283a8 E24c 4b88 8311 Bea2813bc8eGaurav KhalaseNo ratings yet
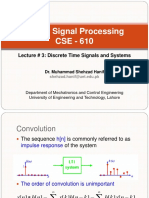
- DSP Lecture on Convolution, Stability and FIR-IIR SystemsDocument20 pagesDSP Lecture on Convolution, Stability and FIR-IIR SystemszaidNo ratings yet
- Regression InterpolationDocument34 pagesRegression InterpolationFuzzy KNo ratings yet
- Department of Electrical Engineering Digital Signal ProcessingDocument5 pagesDepartment of Electrical Engineering Digital Signal ProcessingISHWARI PRASHADNo ratings yet
- Unit 1 First and Higher Order Equations: Structure Page NoDocument35 pagesUnit 1 First and Higher Order Equations: Structure Page NoJAGANNATH PRASADNo ratings yet
- Solution of Differential EquationsDocument34 pagesSolution of Differential Equationspja752No ratings yet
- Solution of Differential EquationsDocument34 pagesSolution of Differential EquationsSaddie SoulaNo ratings yet
- Course Notes 7824 Part8 PDFDocument9 pagesCourse Notes 7824 Part8 PDFHrishikesh BabuNo ratings yet
- Fall 2023 MATH 39100 Final Exam ReviewDocument3 pagesFall 2023 MATH 39100 Final Exam ReviewSimranjit SinghNo ratings yet
- Higher-Order Differential EquationsDocument24 pagesHigher-Order Differential EquationsLief Deltora100% (1)
- Finite Difference Methods Mixed Boundary ConditionDocument6 pagesFinite Difference Methods Mixed Boundary ConditionShivam SharmaNo ratings yet
- EE 831 Advanced Digital Signal Processing: Fall 2020 DR Adil Masood Siddiqui Dradil@mcs - Edu.pkDocument61 pagesEE 831 Advanced Digital Signal Processing: Fall 2020 DR Adil Masood Siddiqui Dradil@mcs - Edu.pkwaseem ur rehmanNo ratings yet
- MTH401 23FEB2011FINALPAPERBYShiningStarDocument9 pagesMTH401 23FEB2011FINALPAPERBYShiningStarMuhammad AtharNo ratings yet
- Tute SignalsDocument12 pagesTute SignalsNikhil KumNo ratings yet
- Z TransformDocument23 pagesZ TransformHina ShakirNo ratings yet
- Linear Second Order Ode: Differential EquationsDocument36 pagesLinear Second Order Ode: Differential EquationsThurkhesan MuruganNo ratings yet
- 05 Differential Equations - Linear Differential EquationsDocument30 pages05 Differential Equations - Linear Differential EquationsRemo Rubian Evangelista100% (1)
- DE2 SolvingHomogeneousSecondOrderDifferentialEquations BP 9-22-14Document4 pagesDE2 SolvingHomogeneousSecondOrderDifferentialEquations BP 9-22-14Snehasish BasuNo ratings yet
- Solutions Assignment-II Questions on Signals and SystemsDocument5 pagesSolutions Assignment-II Questions on Signals and SystemsARUOS SouraNo ratings yet
- CSE - 610 Lecture # 2Document46 pagesCSE - 610 Lecture # 2zaidNo ratings yet
- 9 2012 Deqs Chap3a1Document113 pages9 2012 Deqs Chap3a1Steven BrownNo ratings yet
- DEText Ch20Document8 pagesDEText Ch20AYUSHI SOMANINo ratings yet
- Digital Signal Processing - Week5 Quiz Solutions: June 15, 2018Document6 pagesDigital Signal Processing - Week5 Quiz Solutions: June 15, 2018bita younesianNo ratings yet
- HW 2 SolutionsDocument6 pagesHW 2 SolutionsAbdul BasitNo ratings yet
- Lecture 3Document20 pagesLecture 3Bishnu LamichhaneNo ratings yet
- Power Series Solutions of Linear DesDocument56 pagesPower Series Solutions of Linear DesutpNo ratings yet
- MATH2352 Notes on Reduction of Order and Variation of ParametersDocument4 pagesMATH2352 Notes on Reduction of Order and Variation of ParametersJohn ChanNo ratings yet
- Lesson 7Document4 pagesLesson 7Raheel RazzaqNo ratings yet
- Co4 Problem Sheet For CIADocument2 pagesCo4 Problem Sheet For CIAsurya13905No ratings yet
- Mathematical Tripos Part IA: Complete Answers Are Preferred To FragmentsDocument9 pagesMathematical Tripos Part IA: Complete Answers Are Preferred To FragmentsKrishna OochitNo ratings yet
- 05 06 21Document11 pages05 06 21Bairam Ravi KumarNo ratings yet
- Digital Signal Processing: Overlap-Add Method & Overlap-Save MethodDocument12 pagesDigital Signal Processing: Overlap-Add Method & Overlap-Save MethodBairam Ravi KumarNo ratings yet
- 4.2.6. Design of Equiripple Linear-Phase FIR Digital FiltersDocument17 pages4.2.6. Design of Equiripple Linear-Phase FIR Digital FiltersBairam Ravi KumarNo ratings yet
- DSP Unit-2Document63 pagesDSP Unit-2Bairam Ravi KumarNo ratings yet
- Unit 1Document406 pagesUnit 1Bairam Ravi KumarNo ratings yet
- 17 The Tarrying TimeDocument22 pages17 The Tarrying Timeapi-303147801100% (1)
- Wound Care, Dressing and BandagingDocument11 pagesWound Care, Dressing and BandagingJessica Febrina Wuisan100% (1)
- ReviewerDocument2 pagesReviewerFrank Jomari MurilloNo ratings yet
- Viscous Fluid Flow Ch1-Preliminary Concepts: Kfupm ME 532-172Document40 pagesViscous Fluid Flow Ch1-Preliminary Concepts: Kfupm ME 532-172Majid KhanNo ratings yet
- JAOP Progress ReportDocument36 pagesJAOP Progress ReportnidhisasidharanNo ratings yet
- Gardening Tool Identification QuizDocument3 pagesGardening Tool Identification Quizcaballes.melchor86No ratings yet
- AP Calculus AB 4.1A Worksheet Key ConceptsDocument44 pagesAP Calculus AB 4.1A Worksheet Key ConceptsDavid Joseph100% (1)
- Ipra IrrDocument58 pagesIpra IrrMac Manuel100% (1)
- Fact Sheet - Electrician (General)Document4 pagesFact Sheet - Electrician (General)Saravanan Rasaya100% (1)
- 1964 Plymouth Barracuda Landau (Factory Prototype W/ Targa Top) - Photos & CorrespondenceDocument12 pages1964 Plymouth Barracuda Landau (Factory Prototype W/ Targa Top) - Photos & CorrespondenceJoseph GarzaNo ratings yet
- Fox em Corporate Presentation 08 2022Document19 pagesFox em Corporate Presentation 08 2022Pierluigi GhioneNo ratings yet
- Review of oxidative stress and antioxidants in dentistryDocument4 pagesReview of oxidative stress and antioxidants in dentistrySeeptianMaulanaNo ratings yet
- Usg Iom PDFDocument56 pagesUsg Iom PDFAnonymous 7xHNgoKE6eNo ratings yet
- Quantum Free Electron Theory: Sommerfeld's ModelDocument8 pagesQuantum Free Electron Theory: Sommerfeld's ModelNeelam KapoorNo ratings yet
- Hydro-, Balneo-, and Spa Treatment in Pain Management PDFDocument5 pagesHydro-, Balneo-, and Spa Treatment in Pain Management PDFfriend717100% (1)
- Mathematics 2nd Quarter Test With TOSDocument8 pagesMathematics 2nd Quarter Test With TOSRona Mae Aira AvilesNo ratings yet
- Des Piece F Se 2003 MotorDocument26 pagesDes Piece F Se 2003 MotorPACHYYNNo ratings yet
- UL Anatomy 2022Document4 pagesUL Anatomy 2022jhom smithNo ratings yet
- Mixed Use DevelopmentDocument3 pagesMixed Use DevelopmentMark Darcy UngsonNo ratings yet
- Population Density: Factors and Global DistributionDocument16 pagesPopulation Density: Factors and Global DistributionRYANJUSTIN NICOLASNo ratings yet
- Formulation Development and Evaluation of Sustained Release Tablets of AceclofenacDocument128 pagesFormulation Development and Evaluation of Sustained Release Tablets of Aceclofenacraju narayana padala0% (1)
- A Review of Cyber-Physical System Research Relevant To The Emerging It Trends: Industry 4.0, Iot, Big Data, and Cloud ComputingDocument22 pagesA Review of Cyber-Physical System Research Relevant To The Emerging It Trends: Industry 4.0, Iot, Big Data, and Cloud ComputingFleetNo ratings yet
- Heidegger and RhetoricDocument202 pagesHeidegger and RhetoricMagda AliNo ratings yet
- Brazed Tool ArDocument5 pagesBrazed Tool ArRoni MustafiqNo ratings yet
- DE712-014 Parts Manual - 712014 1 en Rev 1Document248 pagesDE712-014 Parts Manual - 712014 1 en Rev 1Emi DominguezNo ratings yet
- IV Solution Cheat Sheet: Type Description Osmolality Use MiscellaneousDocument1 pageIV Solution Cheat Sheet: Type Description Osmolality Use MiscellaneousKristine Castillo100% (2)
- Footing BiaxialDocument33 pagesFooting BiaxialSanthoshkumar RayavarapuNo ratings yet
- Nireesh Kumar Paidi - Updated ResumeDocument5 pagesNireesh Kumar Paidi - Updated ResumeNikhil Reddy NamreddyNo ratings yet
- Watkins Göbekli Tepe Jerf El Ahmar PDFDocument10 pagesWatkins Göbekli Tepe Jerf El Ahmar PDFHans Martz de la VegaNo ratings yet
- Berry phase in the simple harmonic oscillatorDocument14 pagesBerry phase in the simple harmonic oscillatora2618765No ratings yet