You might also like
- Nuclear Power Institute of China: General DescriptionsDocument9 pagesNuclear Power Institute of China: General DescriptionsFitriyani MusNo ratings yet
- Revolution™ EVO: Technical Reference ManualDocument9 pagesRevolution™ EVO: Technical Reference ManualCeoĐứcTrườngNo ratings yet
- General Router With M2521 Board Installation Checklist: Innovation. Quality. Performance. Best in Industry. WorldwideDocument5 pagesGeneral Router With M2521 Board Installation Checklist: Innovation. Quality. Performance. Best in Industry. WorldwideCasa CristeaNo ratings yet
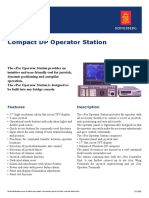
- Compact DP Operator StationDocument2 pagesCompact DP Operator StationMostafa ZidanNo ratings yet
- Nvis 7007: Technical Specifications FeaturesDocument1 pageNvis 7007: Technical Specifications FeaturessarikapravinNo ratings yet
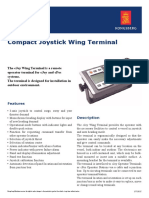
- Compact Joystick Wing TerminalDocument2 pagesCompact Joystick Wing TerminalDan ToughNo ratings yet
- HZC-3980 Circuit Breaker Analyzer-User Manual2020.4.13Document29 pagesHZC-3980 Circuit Breaker Analyzer-User Manual2020.4.13Mạnh Nguyễn VănNo ratings yet
- Scientech 2453: Features Technical SpecificationsDocument1 pageScientech 2453: Features Technical SpecificationsNikhil ShahNo ratings yet
- B16. Nvis 7007 PDFDocument1 pageB16. Nvis 7007 PDFmanual imbNo ratings yet
- Tns Dw2 ManualDocument6 pagesTns Dw2 Manualyeison11No ratings yet
- Industrial Robot Controller: Key BenefitsDocument2 pagesIndustrial Robot Controller: Key BenefitsPhúc Lê HoàngNo ratings yet
- Allied Polisher - Multiprep - ManualDocument44 pagesAllied Polisher - Multiprep - ManualNikhilKotibhaskarNo ratings yet
- Nvis 7008: Features Technical SpecificationsDocument1 pageNvis 7008: Features Technical SpecificationssarikapravinNo ratings yet
- Vendor Qualification and Requirements - 1P - Latest 22-11-2019Document7 pagesVendor Qualification and Requirements - 1P - Latest 22-11-2019rames100% (1)
- Auto Balancing Robot - ITMDocument24 pagesAuto Balancing Robot - ITMDhruv ShahNo ratings yet
- Kodak 2000 Um SM SCHDocument157 pagesKodak 2000 Um SM SCHВиталий КоптеловNo ratings yet
- NC Part Programming: IE550 Fall 2001Document47 pagesNC Part Programming: IE550 Fall 2001Hemant KumarNo ratings yet
- HZC 3980Document25 pagesHZC 3980aris mdmNo ratings yet
- Industrial Robot Controller: Key BenefitsDocument2 pagesIndustrial Robot Controller: Key BenefitsAdarsh SinghNo ratings yet
- Zwick Roell Z600EDocument3 pagesZwick Roell Z600EDanijel HarastiNo ratings yet
- B18. Nvis - 7023Document1 pageB18. Nvis - 7023manual imbNo ratings yet
- Kickert Bowed SpreaderDocument5 pagesKickert Bowed SpreaderOSAMANo ratings yet
- Oscilloscope ST201C: An ISO 9001: 2000 CompanyDocument15 pagesOscilloscope ST201C: An ISO 9001: 2000 CompanyPramod MoryaNo ratings yet
- Runout Measurement Kit CMCPDocument2 pagesRunout Measurement Kit CMCPRaphael LemosNo ratings yet
- Professional Rail Weld Inspection Small Size Easy Operation Real-Time CineloopDocument4 pagesProfessional Rail Weld Inspection Small Size Easy Operation Real-Time CineloopAbderrahim BelloufiNo ratings yet
- Heritage Institute of Technology: Department of Mechanical EngineeringDocument8 pagesHeritage Institute of Technology: Department of Mechanical EngineeringSwapnil DeyNo ratings yet
- CSC162 ManualDocument91 pagesCSC162 ManualBatch3 Testing divisionNo ratings yet
- Potentiometer Error Detector (Make Adtron / Model 4028)Document1 pagePotentiometer Error Detector (Make Adtron / Model 4028)Hitesh MehtaNo ratings yet
- CRO ManualDocument79 pagesCRO ManualElakkiya Selvaraj100% (1)
- Exp 9Document9 pagesExp 920R211 - D L SHRIVARSHININo ratings yet
- Indian Institute of Technology, Bombay Department of Mechanical EngineeringDocument14 pagesIndian Institute of Technology, Bombay Department of Mechanical EngineeringdeepakNo ratings yet
- 2021版MobiEye 700 H-046-007582-01 DR60使用说明书(英文)-153-200Document48 pages2021版MobiEye 700 H-046-007582-01 DR60使用说明书(英文)-153-200javo599No ratings yet
- JK-T5878-58B instruction book 操作手册英语Document22 pagesJK-T5878-58B instruction book 操作手册英语MG MaquinasNo ratings yet
- 890 MCSE2 Motion Control 2 Axis Form6865 - LDocument2 pages890 MCSE2 Motion Control 2 Axis Form6865 - LmhafizanNo ratings yet
- T & C Presentation-2024Document62 pagesT & C Presentation-2024ahamed refaideenNo ratings yet
- CWF PDFDocument8 pagesCWF PDFswapnil kapaseNo ratings yet
- MPM 311 03 01Document1 pageMPM 311 03 01Mousa PetrolNo ratings yet
- Control Lab PDFDocument21 pagesControl Lab PDFabbasmiry83No ratings yet
- NC ProgrammingDocument67 pagesNC ProgrammingSabry S. YoussefNo ratings yet
- Tiduc 07Document33 pagesTiduc 07saahithya AlagarsamyNo ratings yet
- Eddycon CDocument6 pagesEddycon Cmario alberto alva maheNo ratings yet
- ROBO TRAINING PowerPoint PresentationDocument56 pagesROBO TRAINING PowerPoint Presentationravindra191274No ratings yet
- KXG Series - English - 2019 12Document8 pagesKXG Series - English - 2019 12adrienbridel80No ratings yet
- Telerobotics: by Amaren P Das So-E, DRHR, BarcDocument26 pagesTelerobotics: by Amaren P Das So-E, DRHR, BarcAmarenNo ratings yet
- Cad CamDocument5 pagesCad Camravi vermaNo ratings yet
- ST251 30MHzDocument18 pagesST251 30MHzTushar PatilNo ratings yet
- Ad & Dis of Numerical RelaysDocument18 pagesAd & Dis of Numerical RelaysAshley SureshNo ratings yet
- Newrun7 Instruction Manual (English) 180319Document165 pagesNewrun7 Instruction Manual (English) 180319karen guerrero AguilarNo ratings yet
- High Voltage SubstationDocument66 pagesHigh Voltage SubstationjgnmoqjidncpobeimuNo ratings yet
- Electromechanical Lifting Platform Module HBEDocument9 pagesElectromechanical Lifting Platform Module HBEkiyomiii143No ratings yet
- Introduction To ProductDocument18 pagesIntroduction To ProductYokuhoNo ratings yet
- 5 Axis Arm Robot TrainerDocument399 pages5 Axis Arm Robot TrainerTINDER USERNo ratings yet
- Obstacleavoidingrobotreportrobot23 090914221509 Phpapp01Document33 pagesObstacleavoidingrobotreportrobot23 090914221509 Phpapp01Debojit DasNo ratings yet
- RV-6SD - Standard Specifications Manual BFP-A8654-Y (07.12)Document170 pagesRV-6SD - Standard Specifications Manual BFP-A8654-Y (07.12)Hieu NguyenNo ratings yet
- Downloaded From Manuals Search EngineDocument50 pagesDownloaded From Manuals Search EngineHasan AdventureNo ratings yet
- 20180126112359!user Manual NeWayDocument24 pages20180126112359!user Manual NeWayGhiata DumitruNo ratings yet
- High Speed Assembly With Ergonomics & Quality Control.: ECL Brushless ScrewdriverDocument6 pagesHigh Speed Assembly With Ergonomics & Quality Control.: ECL Brushless ScrewdriverBe HappyNo ratings yet
- Milling Machines - Lect. 1 IntroductionDocument11 pagesMilling Machines - Lect. 1 Introductionmustafa1011No ratings yet
- Eet 4217 Lab1Document6 pagesEet 4217 Lab1Dilrangi HerathNo ratings yet
- Crowcon Gas MonitorDocument2 pagesCrowcon Gas MonitorDavid HendersonNo ratings yet
- Pokropivny 2007Document4 pagesPokropivny 2007vasanthanilNo ratings yet
- OneTen-Frontend Web Development FundamentalsDocument5 pagesOneTen-Frontend Web Development FundamentalsOkpetah Chioma christabelNo ratings yet
- DC and AC Machines Lab ManualDocument68 pagesDC and AC Machines Lab ManualGhilman HabibNo ratings yet
- Geomembrane Liner Installation AtarfilDocument24 pagesGeomembrane Liner Installation Atarfildavid1173No ratings yet
- Homework # 4:: Hazard Analysis, Groundmotion, Response Spectrum and Nonlinear ResponseDocument2 pagesHomework # 4:: Hazard Analysis, Groundmotion, Response Spectrum and Nonlinear ResponseAbhinavNo ratings yet
- Radar Pulse CompressionDocument19 pagesRadar Pulse Compressionmalek1p2No ratings yet
- Detergents (Anionic Surfactants, MBAS)Document1 pageDetergents (Anionic Surfactants, MBAS)Anggun SaputriNo ratings yet
- Dashboard Design Best PracticesDocument43 pagesDashboard Design Best Practicesgabriel_babiano8003100% (4)
- ACT Geometry - PolygonsDocument8 pagesACT Geometry - PolygonsaftabNo ratings yet
- Structural Evaluation TechniquesDocument6 pagesStructural Evaluation TechniquesMohan NaikNo ratings yet
- M.C.a.sem III Operation Research 1Document50 pagesM.C.a.sem III Operation Research 1Pankaj SatkarNo ratings yet
- Omnipeek GettingStartedDocument85 pagesOmnipeek GettingStartedchris100% (1)
- PLC Programming With RSLogix 500Document132 pagesPLC Programming With RSLogix 500kemo_750252831No ratings yet
- 2021 10 11 - Intro ML - InsermDocument41 pages2021 10 11 - Intro ML - Insermpo esperitableNo ratings yet
- Viscosity MeasurementDocument8 pagesViscosity MeasurementRian SteveNo ratings yet
- BB Conduction-and-ConvectionDocument13 pagesBB Conduction-and-ConvectionRamon LlonaNo ratings yet
- A Quick Route To Sums of PowersDocument6 pagesA Quick Route To Sums of PowersJason WongNo ratings yet
- Norma Astm d5731 PLTDocument6 pagesNorma Astm d5731 PLTrodriahumNo ratings yet
- MT882 User ManualDocument61 pagesMT882 User ManualMarius HîrsescuNo ratings yet
- Dosing Technology: eco-CONTROL EC200-KDocument2 pagesDosing Technology: eco-CONTROL EC200-KMario Vargas VegaNo ratings yet
- Cbse - Department of Skill Education Curriculum For Session 2021-2022Document13 pagesCbse - Department of Skill Education Curriculum For Session 2021-2022Dushyant SinghNo ratings yet
- Circular Motion 1 QPDocument8 pagesCircular Motion 1 QPNovi Juniati PitrianaNo ratings yet
- Steel and Timber Structures Part Two:: Design of Structural Steel MembersDocument28 pagesSteel and Timber Structures Part Two:: Design of Structural Steel MembersDhinesh KalaimaranNo ratings yet
- Indian Pharmacopoeia 2020 - Vol. 1 (PART 1)Document255 pagesIndian Pharmacopoeia 2020 - Vol. 1 (PART 1)the reader100% (1)
- Newton First Law of MotionDocument6 pagesNewton First Law of MotionKin ChristineNo ratings yet
- Pipe Fabrication Brochure CompressedDocument2 pagesPipe Fabrication Brochure CompressedLeDzungNo ratings yet
- Exemplar Gr1 Maths Diagnostic Assessment - Term 2 - 2021Document4 pagesExemplar Gr1 Maths Diagnostic Assessment - Term 2 - 2021Liandra'Lulu'VdMerweNo ratings yet
- CEH PRACTICAL NOTES - Pratik KaranDocument23 pagesCEH PRACTICAL NOTES - Pratik Karanproton infosecNo ratings yet
- Effects of The Cone and Edge On The Acoustic Characteristics Ofa Cone LoudspeakerDocument13 pagesEffects of The Cone and Edge On The Acoustic Characteristics Ofa Cone LoudspeakerJavierNo ratings yet