You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Customer Segmentation Using RFM Analysis: OverviewDocument11 pagesCustomer Segmentation Using RFM Analysis: OverviewAlain R LugonesNo ratings yet
- 350W Single Output Switching Power SupplyDocument2 pages350W Single Output Switching Power SupplyJuan David Velasquez BranNo ratings yet
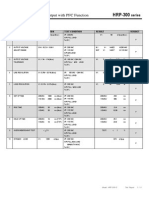
- 300W Single Output With PFC Function: SeriesDocument6 pages300W Single Output With PFC Function: SeriesJuan David Velasquez BranNo ratings yet
- ARC1 3.0 Jan15 StudentWorkbookDocument306 pagesARC1 3.0 Jan15 StudentWorkbookJuan David Velasquez Bran100% (2)
- Diodo 1N5221B PDFDocument3 pagesDiodo 1N5221B PDFJuan David Velasquez BranNo ratings yet
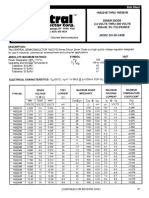
- 2N3791 & 2N3792Document3 pages2N3791 & 2N3792Juan David Velasquez BranNo ratings yet
- 1N5232B - Diodo ZenerDocument3 pages1N5232B - Diodo ZenerJuan David Velasquez BranNo ratings yet
- Bsp297-Sipmos SMDDocument10 pagesBsp297-Sipmos SMDJuan David Velasquez BranNo ratings yet
- Centaur UserGuide 17935R13Document229 pagesCentaur UserGuide 17935R13denismatonNo ratings yet
- Travel ExDocument3 pagesTravel ExBenedic Doroteo0% (1)
- Adsp BF592Document44 pagesAdsp BF592waqarsuparcoNo ratings yet
- Virtual Library SystemDocument32 pagesVirtual Library SystemAdamu HassanNo ratings yet
- Iriansyah Putra - CVDocument5 pagesIriansyah Putra - CVFitra AkbarNo ratings yet
- DOD Marking GuideDocument36 pagesDOD Marking GuideSarah OlsonNo ratings yet
- Bahasa Inggris XI NewDocument15 pagesBahasa Inggris XI NewRohani Matande100% (1)
- 1 Tập Tin Đích: Victoria Can Tho HotelDocument81 pages1 Tập Tin Đích: Victoria Can Tho Hotelapi-26179120No ratings yet
- QRG - TCA Thrustmaster Airbus Edition Settings V5 - SMDocument8 pagesQRG - TCA Thrustmaster Airbus Edition Settings V5 - SMNachoNo ratings yet
- Users GuideDocument268 pagesUsers GuideHerdyliowNo ratings yet
- Cmose mcq-1Document30 pagesCmose mcq-1Prajwal BirwadkarNo ratings yet
- ME Operating Men, I Think All Agree Have Harmonics. I Ull Agree ThatDocument7 pagesME Operating Men, I Think All Agree Have Harmonics. I Ull Agree ThatJohn WNSNo ratings yet
- Hydrocarbon Processing October 2017Document157 pagesHydrocarbon Processing October 2017danyel87100% (1)
- Building of Inmoov Robotic Arm For Performing Various OperationsDocument10 pagesBuilding of Inmoov Robotic Arm For Performing Various OperationsIJRASETPublicationsNo ratings yet
- Automatic Speed Breaker On Time Demand Using Embedded SystemsDocument4 pagesAutomatic Speed Breaker On Time Demand Using Embedded SystemsMotupatulu RamireddyNo ratings yet
- IHI0031G Debug Interface v5 2 Architecture SpecificationDocument296 pagesIHI0031G Debug Interface v5 2 Architecture SpecificationfekipoNo ratings yet
- PDF Document of The Fridge-Tag® 2: T Time / Date ChangedDocument2 pagesPDF Document of The Fridge-Tag® 2: T Time / Date ChangedAnonymous idPPyERfBnNo ratings yet
- Practice Test 1Document40 pagesPractice Test 1essamwahbaNo ratings yet
- 0029200000000ma07 2-0 Adm-UmDocument198 pages0029200000000ma07 2-0 Adm-UmoicfbdNo ratings yet
- AI UT Paper 22-23Document2 pagesAI UT Paper 22-23Divyanshu Ranjan SinghNo ratings yet
- Apollo XP95 Input Output MonitorDocument3 pagesApollo XP95 Input Output Monitormahpr65No ratings yet
- Numerical Control PDFDocument23 pagesNumerical Control PDFmishari67% (3)
- Pegasus SpywareDocument12 pagesPegasus SpywareChirag MoryaNo ratings yet
- J1IG ISDN Process v1Document7 pagesJ1IG ISDN Process v1KAMALJEET SINGH100% (1)
- List of Experiments/ExcercisesDocument22 pagesList of Experiments/ExcercisesTanmay DubeyNo ratings yet
- TARANIS X9D Digital Telemetry Radio System User Guide-V1.0.00Document25 pagesTARANIS X9D Digital Telemetry Radio System User Guide-V1.0.00Saripudin GonNo ratings yet
- Foundations of Information Systems' in Business: Irwin/Mcgraw-Hill Irwin/Mcgraw-HillDocument20 pagesFoundations of Information Systems' in Business: Irwin/Mcgraw-Hill Irwin/Mcgraw-HillArslan BukhariNo ratings yet
- Department of Posts: Ministry of Communication & TechnologyDocument27 pagesDepartment of Posts: Ministry of Communication & TechnologySPM NAIHATINo ratings yet
- Organizing DocumentDocument9 pagesOrganizing Documentapi-481748170No ratings yet