You might also like
- CS231n Convolutional Neural Networks For Visual RecognitionDocument2 pagesCS231n Convolutional Neural Networks For Visual RecognitionFernando Robles BermejoNo ratings yet
- CS231n - Convolutional-Networks 1Document3 pagesCS231n - Convolutional-Networks 1olia.92No ratings yet
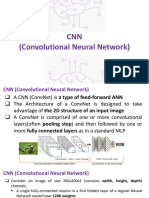
- Convolutional Neural Networks (Cnns / Convnets)Document21 pagesConvolutional Neural Networks (Cnns / Convnets)CGNo ratings yet
- CS231n Convolutional Neural Networks For Visual RecognitionDocument25 pagesCS231n Convolutional Neural Networks For Visual RecognitionUsama JavedNo ratings yet
- Convolutional NetworksDocument25 pagesConvolutional NetworksIlya KavalerovNo ratings yet
- UNIT-4 Foundations of Deep LearningDocument43 pagesUNIT-4 Foundations of Deep Learningbhavana100% (1)
- Convolutional Layer: Web-Based DemoDocument3 pagesConvolutional Layer: Web-Based Demoolia.92No ratings yet
- Unit 3 - Machine Learning - WWW - Rgpvnotes.inDocument29 pagesUnit 3 - Machine Learning - WWW - Rgpvnotes.inASHOKA KUMARNo ratings yet
- Convolutional Neural NetworkDocument61 pagesConvolutional Neural NetworkAnkit MahapatraNo ratings yet
- Unit 3 - Machine LearningDocument16 pagesUnit 3 - Machine LearningGauri BansalNo ratings yet
- CS 601 Machine Learning Unit 3Document37 pagesCS 601 Machine Learning Unit 3Priyanka BhateleNo ratings yet
- Deep LearningUNIT-IVDocument16 pagesDeep LearningUNIT-IVnikhilsinha0099No ratings yet
- CNN ArchitectureDocument24 pagesCNN ArchitectureAKASH NAYAKNo ratings yet
- 03 CNNDocument33 pages03 CNNaldi afrizalNo ratings yet
- Neural Networks Unit 3Document93 pagesNeural Networks Unit 3svkarthik83No ratings yet
- CNN and AutoencoderDocument56 pagesCNN and AutoencoderShubham BhaleraoNo ratings yet
- DL Unit3Document8 pagesDL Unit3Anonymous xMYE0TiNBcNo ratings yet
- CS601 - Machine Learning - Unit 3 - Notes - 1672759761Document15 pagesCS601 - Machine Learning - Unit 3 - Notes - 1672759761mohit jaiswalNo ratings yet
- Convolutional Neural Networks: Computer VisionDocument14 pagesConvolutional Neural Networks: Computer VisionVIDUSHINo ratings yet
- Convolutional Neural Network - Towards Data Science PDFDocument10 pagesConvolutional Neural Network - Towards Data Science PDFNourhan MohamedNo ratings yet
- Convolutional Neural Networks (CNN)Document7 pagesConvolutional Neural Networks (CNN)Towsif SalauddinNo ratings yet
- Convolutional Neural Networks-Part2Document21 pagesConvolutional Neural Networks-Part2polinati.vinesh2023No ratings yet
- Deep Neural Network DNNDocument5 pagesDeep Neural Network DNNjaffar bikatNo ratings yet
- Data Science Interview Preparation (# DAY 22)Document16 pagesData Science Interview Preparation (# DAY 22)ARPAN MAITYNo ratings yet
- Data Science Interview Preparation 22Document16 pagesData Science Interview Preparation 22Julian TolosaNo ratings yet
- Data Science Interview Preparation (# DAY 22)Document16 pagesData Science Interview Preparation (# DAY 22)ThànhĐạt NgôNo ratings yet
- Step by Step Procedure That How I Resolve Given Task PytorhDocument6 pagesStep by Step Procedure That How I Resolve Given Task PytorhAbhay Singh TanwarNo ratings yet
- CNN For Visual RecognitionDocument4 pagesCNN For Visual RecognitionAbhinavJainNo ratings yet
- Deep Learning Unit-IIIDocument9 pagesDeep Learning Unit-IIIAnonymous xMYE0TiNBcNo ratings yet
- Resnets: BackgroundDocument8 pagesResnets: BackgroundIlmi KalamNo ratings yet
- Soft Computing ITE1015 Assignment-1Document17 pagesSoft Computing ITE1015 Assignment-1harshNo ratings yet
- Convolutional Neural Networks (LeNet) - DeepLearning 0.1 DocumentationDocument12 pagesConvolutional Neural Networks (LeNet) - DeepLearning 0.1 DocumentationSumit PatelNo ratings yet
- 55CNNDocument5 pages55CNNMadhavan SridharNo ratings yet
- Unit 5Document8 pagesUnit 5Manish SontakkeNo ratings yet
- 5 Layers of A Convolutional Neural NetworkDocument15 pages5 Layers of A Convolutional Neural Networknawazk8191No ratings yet
- Convolutional Neural Network (CNN)Document38 pagesConvolutional Neural Network (CNN)Mohammad Hashim JaffriNo ratings yet
- MLOA Exp 1 - C121Document18 pagesMLOA Exp 1 - C121Devanshu MaheshwariNo ratings yet
- Convolutional Neural Networks & ZapierDocument75 pagesConvolutional Neural Networks & ZapierTimer InsightNo ratings yet
- Fully Connected (FC) Layer: Usually The Last Part (Or Layers) of Every CNN ArchitectureDocument2 pagesFully Connected (FC) Layer: Usually The Last Part (Or Layers) of Every CNN Architectureankit sahuNo ratings yet
- FODL Unit-4Document46 pagesFODL Unit-4Anushka JanotiNo ratings yet
- CNN Case Studies Unit 4Document13 pagesCNN Case Studies Unit 4Anushka JanotiNo ratings yet
- Short Qns CNNDocument11 pagesShort Qns CNNSwathi KNo ratings yet
- Understanding of Convolutional Neural Network (CNN) - Deep LearningDocument7 pagesUnderstanding of Convolutional Neural Network (CNN) - Deep LearningKashaf BakaliNo ratings yet
- Deep Learning PDFDocument55 pagesDeep Learning PDFNitesh Kumar SharmaNo ratings yet
- Convolution Neural Network: CP - 6 Machine Learning M S PrasadDocument28 pagesConvolution Neural Network: CP - 6 Machine Learning M S PrasadM S PrasadNo ratings yet
- Appiled AIDocument9 pagesAppiled AIchude okeruluNo ratings yet
- IBM Question & AnswersDocument3 pagesIBM Question & AnswersMr SKammerNo ratings yet
- E-Eli5-Way-3bd2b1164a53: CNN (Source:)Document4 pagesE-Eli5-Way-3bd2b1164a53: CNN (Source:)Mohit SinghalNo ratings yet
- Machine Learning (ML) :: Aim: Analysis and Implementation of Deep Neural Network. DefinitionsDocument6 pagesMachine Learning (ML) :: Aim: Analysis and Implementation of Deep Neural Network. DefinitionsVishal LuniaNo ratings yet
- Data Science Interview Preparation (30 Days of Interview Preparation)Document15 pagesData Science Interview Preparation (30 Days of Interview Preparation)qtdaivuongNo ratings yet
- CNN (Convolutional Neural Network) :: Feature Map Input Image X Feature DetectorDocument1 pageCNN (Convolutional Neural Network) :: Feature Map Input Image X Feature Detectorankit sahuNo ratings yet
- Chapter 3Document7 pagesChapter 3pavithrNo ratings yet
- Neural Networks and Deep Learning (PE - V) (18CSE23) Unit - 4Document11 pagesNeural Networks and Deep Learning (PE - V) (18CSE23) Unit - 4Sathwik ChandraNo ratings yet
- Convolution Neural NetworkDocument74 pagesConvolution Neural Networktoon townNo ratings yet
- KJ Mohamed Dhanish MIP 2Document36 pagesKJ Mohamed Dhanish MIP 2180051601033 ecea2018No ratings yet
- Convolution Neural Network: CP - 6 Machine Learning M S PrasadDocument37 pagesConvolution Neural Network: CP - 6 Machine Learning M S PrasadMani S Prasad100% (1)
- Convolutional Neural Network: by Gagandeep KaurDocument107 pagesConvolutional Neural Network: by Gagandeep Kaurjamiesonlara100% (1)
- RKM072A29 - Online Assignment 1 - INT248 - ReportDocument18 pagesRKM072A29 - Online Assignment 1 - INT248 - ReportShahid aliNo ratings yet
- SVM - AnnDocument29 pagesSVM - AnnRajaNo ratings yet
- Convolutional Neural Networks: Fundamentals and Applications for Analyzing Visual ImageryFrom EverandConvolutional Neural Networks: Fundamentals and Applications for Analyzing Visual ImageryNo ratings yet
- 4-Support Vector MachineDocument13 pages4-Support Vector MachineMunam NaseerNo ratings yet
- cs229 Notes1 PDFDocument30 pagescs229 Notes1 PDFGuilherme GermanoNo ratings yet
- 6-Neural Netowks and Deep LearningDocument285 pages6-Neural Netowks and Deep LearningMunam NaseerNo ratings yet
- 9 - Neural Networks 1Document11 pages9 - Neural Networks 1Munam Naseer100% (1)
- Chapter Three Artificial IntelligenceDocument26 pagesChapter Three Artificial Intelligenceአቡ ረስላንNo ratings yet
- Unlock The Power of ChatGPTDocument3 pagesUnlock The Power of ChatGPTLeo MessiNo ratings yet
- A Classification and Regression Tree Algorithm For Heart Disease Modeling and PredictionDocument9 pagesA Classification and Regression Tree Algorithm For Heart Disease Modeling and PredictionRavindra MSNo ratings yet
- Questions-For-Data-Mining-2020 Eng MarwanDocument19 pagesQuestions-For-Data-Mining-2020 Eng Marwansohila aliNo ratings yet
- ExpoundDocument13 pagesExpoundsinghvibhavyNo ratings yet
- English 2021Document15 pagesEnglish 2021katehughes332No ratings yet
- Prediction of Student Dropout in E-Learning Program Through The Use of Machine Learning MethodDocument7 pagesPrediction of Student Dropout in E-Learning Program Through The Use of Machine Learning Methodjavier perezNo ratings yet
- Computer Security 2020Document451 pagesComputer Security 2020Luis Monge100% (1)
- Ayurveda With Artificial Intelligence: The 2.0 Version: Dr. Jaya Singh, Dr. Shweta Mishra and Dr. Nirmal KumarDocument3 pagesAyurveda With Artificial Intelligence: The 2.0 Version: Dr. Jaya Singh, Dr. Shweta Mishra and Dr. Nirmal KumarJaya singhNo ratings yet
- Features Extraction and Reduction Techniques With Optimized SVM For Persian/Arabic Handwritten Digits RecognitionDocument19 pagesFeatures Extraction and Reduction Techniques With Optimized SVM For Persian/Arabic Handwritten Digits RecognitionYudishNo ratings yet
- Review of CNN-MHSA: A Convolutional Neural Network and Multi-Head Self-Attention Combined Approach For Detecting Phishing Websites byDocument3 pagesReview of CNN-MHSA: A Convolutional Neural Network and Multi-Head Self-Attention Combined Approach For Detecting Phishing Websites byDipon GhoshNo ratings yet
- Finding of Arrythmia by 2D Image ClassificationDocument5 pagesFinding of Arrythmia by 2D Image ClassificationKaavyaNo ratings yet
- Introduction To Data Science What Is Data Science?Document11 pagesIntroduction To Data Science What Is Data Science?RajNo ratings yet
- Management NotesDocument15 pagesManagement NotesLina usmaniNo ratings yet
- Day 1-FDPDocument20 pagesDay 1-FDPshamilie17No ratings yet
- Towards Zero Downtime Using Machine Learning To PRDocument13 pagesTowards Zero Downtime Using Machine Learning To PRchambo malawiNo ratings yet
- Data-Driven Discovery of Koopman Eigenfunctions For Control: Eurika Kaiser, J. Nathan Kutz, and Steven L. BruntonDocument36 pagesData-Driven Discovery of Koopman Eigenfunctions For Control: Eurika Kaiser, J. Nathan Kutz, and Steven L. BruntonIlyasNo ratings yet
- Multi-Source Multi-Class Fake News DetectionDocument12 pagesMulti-Source Multi-Class Fake News DetectionTouqeer Ul IslamNo ratings yet
- Credit Card Defaulter DetectionDocument12 pagesCredit Card Defaulter Detectionupdateak47No ratings yet
- LTDD Summative Brief CW1Document10 pagesLTDD Summative Brief CW1waqas aliNo ratings yet
- Detecting Fake News Using Machine Learning: Gaurav Kumar Choubey (21mca1061) Guide Name: DR Rajarajeswari SDocument29 pagesDetecting Fake News Using Machine Learning: Gaurav Kumar Choubey (21mca1061) Guide Name: DR Rajarajeswari SSudip AyattanNo ratings yet
- Data Science and Machine Learning Brochure SkillovillaDocument40 pagesData Science and Machine Learning Brochure SkillovillaAyush AryanNo ratings yet
- Generative Adversarial Networks (Gans) - 01: Main Notions About GansDocument2 pagesGenerative Adversarial Networks (Gans) - 01: Main Notions About GansAbrar WaliNo ratings yet
- Literature Review On Sentiment AnalysisDocument8 pagesLiterature Review On Sentiment Analysisaflsjcibl100% (1)
- Final Lab Manual of ML BCADocument69 pagesFinal Lab Manual of ML BCAAwanit KumarNo ratings yet
- A Machine Learning Approach For Bengali Handwritten Vowel Character RecognitionDocument10 pagesA Machine Learning Approach For Bengali Handwritten Vowel Character RecognitionIAES IJAINo ratings yet
- Supervised Learning-1Document37 pagesSupervised Learning-1Pandu KNo ratings yet
- Future Scope and ConclusionDocument13 pagesFuture Scope and ConclusionGourab PalNo ratings yet
- Ancient Tamil Translator SystemDocument3 pagesAncient Tamil Translator SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Disruptive Technologies A 2021 UpdateDocument37 pagesDisruptive Technologies A 2021 UpdateCTRM CenterNo ratings yet