You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Flight Controller F722-Hd: Quick Start GuideDocument5 pagesFlight Controller F722-Hd: Quick Start GuideGokhan OzdemirNo ratings yet
- Flight Controller F722-Se: Basic ManualDocument6 pagesFlight Controller F722-Se: Basic ManualGokhan OzdemirNo ratings yet
- LUX-H7-User Manual v1Document5 pagesLUX-H7-User Manual v1Shashank SharmaNo ratings yet
- Flight Controller F411-Wse: Quick Start GuideDocument3 pagesFlight Controller F411-Wse: Quick Start GuideGokhan OzdemirNo ratings yet
- Stack008 V2Document1 pageStack008 V2Kryštof PaličkaNo ratings yet
- Datasheet: Capacitive Touch Screen ControllerDocument13 pagesDatasheet: Capacitive Touch Screen ControllerPrasad GargeNo ratings yet
- Modifications On v6:: F405 / 5VBEC / Camera Control / 5x UART / Flash / BaroDocument2 pagesModifications On v6:: F405 / 5VBEC / Camera Control / 5x UART / Flash / BarodaniNo ratings yet
- BITxxRM-LP en ds01.06Document15 pagesBITxxRM-LP en ds01.06АлексейNo ratings yet
- Quick start guide for STM32F765 flight controllerDocument4 pagesQuick start guide for STM32F765 flight controllerGokhan OzdemirNo ratings yet
- Digi-Log Reverb Module (Btdr-3) : A Great Digital Reverb Sound That Easily Replaces A Spring Reverberation UnitDocument3 pagesDigi-Log Reverb Module (Btdr-3) : A Great Digital Reverb Sound That Easily Replaces A Spring Reverberation UnitDmedNo ratings yet
- BTDR 3Document3 pagesBTDR 3FlyinGaitNo ratings yet
- Omnibus F4 Fireworks FC with 32K Gyro Loop, 5/8V BEC, Hall Sensor & 5 UARTDocument3 pagesOmnibus F4 Fireworks FC with 32K Gyro Loop, 5/8V BEC, Hall Sensor & 5 UARTdaniNo ratings yet
- SamProRF Graphical Datasheet UpdatedDocument1 pageSamProRF Graphical Datasheet UpdatedYu-feng LinNo ratings yet
- ProMicro8MHzv2 PDFDocument1 pageProMicro8MHzv2 PDFChristhoper TanamasNo ratings yet
- FRGT_Power_requirementDocument6 pagesFRGT_Power_requirementdhani.wijayaNo ratings yet
- RFM300HW RFM300W Datasheet EN V1.31Document8 pagesRFM300HW RFM300W Datasheet EN V1.31Fernando WeberNo ratings yet
- Atmega8hva Atmega16hvaDocument196 pagesAtmega8hva Atmega16hvaPiterKK KosewskiNo ratings yet
- IoT Tag Gateway GuideDocument15 pagesIoT Tag Gateway GuidevlnsudhishNo ratings yet
- ProMicro16MHzv1 PDFDocument1 pageProMicro16MHzv1 PDFrov1976100% (1)
- Flexi RRH 2-Pipe 2100 120 W (FRGY)Document4 pagesFlexi RRH 2-Pipe 2100 120 W (FRGY)Andrei GhitiuNo ratings yet
- WHITE Beet P Datasheet Rev.1.02 20220630Document17 pagesWHITE Beet P Datasheet Rev.1.02 20220630Adarsh100% (1)
- Narrow Band FM Multi-Channel UHF Transceiver: FeaturesDocument11 pagesNarrow Band FM Multi-Channel UHF Transceiver: FeaturesRodrigo Ortolá InocentiNo ratings yet
- A2t20h160w04n 1517293Document12 pagesA2t20h160w04n 1517293PalmNo ratings yet
- ATMEGA325PDocument22 pagesATMEGA325PAndrei GradinaruNo ratings yet
- 8.10 Flexi RFM 6-Pipe 1800 360 W (FXED) : WARNING! Risk of Electric Shock!Document7 pages8.10 Flexi RFM 6-Pipe 1800 360 W (FXED) : WARNING! Risk of Electric Shock!Андрей Свинин100% (2)
- Boron DatasheetDocument27 pagesBoron DatasheetjibaowlNo ratings yet
- TV System Power Management Solution: General Description FeaturesDocument41 pagesTV System Power Management Solution: General Description FeaturespeternewsNo ratings yet
- JL_AC7916A_Datasheet_V2.1_20230418Document23 pagesJL_AC7916A_Datasheet_V2.1_20230418Minh PhamNo ratings yet
- KX-TG2361JXB Handset Circuit OperationDocument40 pagesKX-TG2361JXB Handset Circuit OperationReza AranNo ratings yet
- COM 02 030 DatasheetDocument14 pagesCOM 02 030 DatasheetpawallerNo ratings yet
- LPC2148 EbookDocument89 pagesLPC2148 Ebookkarthikeyan_mani1987No ratings yet
- Zeez F7: User ManualDocument15 pagesZeez F7: User ManualWiytboiNo ratings yet
- Rak3172-Sip Wisduo Lpwan Sip Datasheet: DescriptionDocument9 pagesRak3172-Sip Wisduo Lpwan Sip Datasheet: DescriptionoliviercorianNo ratings yet
- Evaluates: DS28E01/DS28CN01/DS2460 Secure Authentication Starter KitDocument15 pagesEvaluates: DS28E01/DS28CN01/DS2460 Secure Authentication Starter KitWilman LealNo ratings yet
- 2.4Ghz To 2.5Ghz Linear Power Amplifier: General Description FeaturesDocument9 pages2.4Ghz To 2.5Ghz Linear Power Amplifier: General Description FeaturesJohn MurdochNo ratings yet
- TV/VCR Tuner Ic With DC/DC Converter: FeaturesDocument21 pagesTV/VCR Tuner Ic With DC/DC Converter: FeaturesEdsel SilvaNo ratings yet
- Xenon Datasheet: The Xenon Has Been Discontinued. SeeDocument25 pagesXenon Datasheet: The Xenon Has Been Discontinued. SeeMurilo CarvalhoNo ratings yet
- Specification Integrated Light Source Intelligent Control of Chip-On-Top SMD Type LedDocument12 pagesSpecification Integrated Light Source Intelligent Control of Chip-On-Top SMD Type Ledai computersNo ratings yet
- Pam 7q Gps Module Product Guide v10 1Document6 pagesPam 7q Gps Module Product Guide v10 1jose ambiorixNo ratings yet
- PAC5527EVK1_UserManual_Rev1p0Document11 pagesPAC5527EVK1_UserManual_Rev1p0avv81419No ratings yet
- TYBT1 ModuleDocument7 pagesTYBT1 ModuleRaya SadhukhanNo ratings yet
- Bd9576muf C eDocument93 pagesBd9576muf C eFaizan IrfanNo ratings yet
- Features Features Features FeaturesDocument8 pagesFeatures Features Features FeaturesPraneet K DavidNo ratings yet
- 2W Stereo Audio Amplifier: Global Mixed-Mode Technology IncDocument13 pages2W Stereo Audio Amplifier: Global Mixed-Mode Technology Inczigmund zigmundNo ratings yet
- TV System Power Management Solution: General Description FeaturesDocument41 pagesTV System Power Management Solution: General Description FeaturespeternewsNo ratings yet
- BL0940 APPNote TSSOP14 V1.04 ENDocument6 pagesBL0940 APPNote TSSOP14 V1.04 ENGeorgi IlievNo ratings yet
- TX2/TX1 AN310 Carrier Smallest Design for Nvidia Jetson ModulesDocument3 pagesTX2/TX1 AN310 Carrier Smallest Design for Nvidia Jetson ModulessooryaNo ratings yet
- LPD6803Document13 pagesLPD6803Deyabu DesignNo ratings yet
- Digital Panel Meters Modular Indicator and Controller Type UDM35Document14 pagesDigital Panel Meters Modular Indicator and Controller Type UDM35Reca DewantoroNo ratings yet
- FAO80RUIXLALERKDocument14 pagesFAO80RUIXLALERKLuisRupayNo ratings yet
- General Description: I C-Bus Controlled 4Document49 pagesGeneral Description: I C-Bus Controlled 4Рамиль НевмяновNo ratings yet
- Flexi Remote Radio Head 2TX 900 (FHDB) PDFDocument4 pagesFlexi Remote Radio Head 2TX 900 (FHDB) PDFAryaNo ratings yet
- Block-Diagram-1384309 KPG 22uDocument4 pagesBlock-Diagram-1384309 KPG 22uJairo MoralesNo ratings yet
- F405-WTE Manual PDFDocument5 pagesF405-WTE Manual PDFBlockFace08No ratings yet
- Emus Mnc310c DatasheetDocument6 pagesEmus Mnc310c DatasheetpeterNo ratings yet
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsFrom EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNo ratings yet
- Crouch 2009Document9 pagesCrouch 2009ClaudiaFariaNo ratings yet
- UntitledDocument4 pagesUntitledHilda PiresNo ratings yet
- A-Class Chambers - FBBCIDocument10 pagesA-Class Chambers - FBBCIJubaer INo ratings yet
- Filtration Unit: Operating and Maintenance InstructionsDocument68 pagesFiltration Unit: Operating and Maintenance InstructionsAkash RockNo ratings yet
- Chapter Two: Fundamental Data Types: C++ For Everyone by Cay HorstmannDocument105 pagesChapter Two: Fundamental Data Types: C++ For Everyone by Cay HorstmannRahul NarayanNo ratings yet
- ImplicacionesEticasIA ML BDDocument13 pagesImplicacionesEticasIA ML BDjoseNo ratings yet
- MT6750 Android FdfdatterDocument10 pagesMT6750 Android FdfdatterCuentaNo ratings yet
- Part 3 Simulation With RDocument42 pagesPart 3 Simulation With RNguyễn OanhNo ratings yet
- Multi Functional Synthetic Grease: Test Item Test Method Multemp AcDocument1 pageMulti Functional Synthetic Grease: Test Item Test Method Multemp Actxto2881No ratings yet
- 1.overview of Operating SystemDocument50 pages1.overview of Operating SystemNisarg GugaleNo ratings yet
- Calculating transformer loss cost ratesDocument3 pagesCalculating transformer loss cost ratesRatana KemNo ratings yet
- FZS600 Owners ManualDocument105 pagesFZS600 Owners ManualjonboynzNo ratings yet
- CSPro Android - Data Transfert GuideDocument9 pagesCSPro Android - Data Transfert GuideSADOUN SeNo ratings yet
- Complete Reference C5.0 GoodDocument27 pagesComplete Reference C5.0 Goodshiva_dilse123No ratings yet
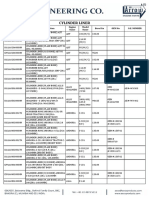
- Cylinder Liner: Item Code Item Description Engine Name Model Name Bore Dia Oem No O.E. NumberDocument49 pagesCylinder Liner: Item Code Item Description Engine Name Model Name Bore Dia Oem No O.E. NumberDuvacy0% (1)
- 4 Const Prob. and Sol. Burj KhalifaDocument5 pages4 Const Prob. and Sol. Burj Khalifaprakriti goyalNo ratings yet
- Dial Communication Framework Setup LogDocument2 pagesDial Communication Framework Setup LogJUAL AEROPUERTONo ratings yet
- Destroy Any Device With EMP Jammer - 3 Steps - InstructablesDocument9 pagesDestroy Any Device With EMP Jammer - 3 Steps - InstructablesCarlos Antonio De Bourbon-MontenegroNo ratings yet
- DP2PN2Solver User GuideDocument1 pageDP2PN2Solver User GuideAlexander Segura BallesterosNo ratings yet
- Pig Handling System Brochure PDFDocument6 pagesPig Handling System Brochure PDFKRUNAL SHAHNo ratings yet
- 2 Nzwwufk 90 I 132 JaDocument4 pages2 Nzwwufk 90 I 132 JaSk KrNo ratings yet
- CAT 32 Operation Maintenance ManualDocument148 pagesCAT 32 Operation Maintenance Manualpakmarineeng96% (71)
- TPMM MCQs On Unit - IDocument71 pagesTPMM MCQs On Unit - IRohit ShindeNo ratings yet
- Spare Parts Manual: ModelsDocument78 pagesSpare Parts Manual: ModelsÁrpád AndrisNo ratings yet
- Tle-Epas Module 1Document24 pagesTle-Epas Module 1Exequiel Azares Quindo100% (7)
- MS Exercise 3Document8 pagesMS Exercise 3Samir AlzekriNo ratings yet
- EBRD Technical and Financial Proposal FormsDocument9 pagesEBRD Technical and Financial Proposal Formsaspany loisNo ratings yet
- OUTREACH PROGRAM FOR PDLsDocument8 pagesOUTREACH PROGRAM FOR PDLsjayson bernadasNo ratings yet
- GSE 460 Indicator - User ManualDocument48 pagesGSE 460 Indicator - User ManualjoseNo ratings yet
- Final Report OMNI WING AIRCRAFTDocument51 pagesFinal Report OMNI WING AIRCRAFTPrithvi AdhikaryNo ratings yet