You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- All NEIS StandardsDocument2 pagesAll NEIS Standardsdelmar02No ratings yet
- Description and Adjusting Instructions "QPF" Universal Reactive-Current and Cos Phi Regulator and Balancer For "COSIMAT N" Voltage RegulatorDocument21 pagesDescription and Adjusting Instructions "QPF" Universal Reactive-Current and Cos Phi Regulator and Balancer For "COSIMAT N" Voltage RegulatorTariqMaqsood33% (3)
- Egat Smart Grid Roadmap Rev2Document37 pagesEgat Smart Grid Roadmap Rev2Lance Vanderhaven100% (1)
- Ppt. On Transformer WindingsDocument23 pagesPpt. On Transformer WindingsSandhya Rathore100% (2)
- LPC2148 EbookDocument89 pagesLPC2148 Ebookkarthikeyan_mani1987No ratings yet
- DBR BTG ElectricalDocument67 pagesDBR BTG ElectricalParmeshwar Nath TripathiNo ratings yet
- Detuned Capacitor Banks Prevent Voltage DistortionDocument4 pagesDetuned Capacitor Banks Prevent Voltage DistortionSeindahNya100% (2)
- ProMicro16MHzv1 PDFDocument1 pageProMicro16MHzv1 PDFrov1976100% (1)
- WHITE Beet P Datasheet Rev.1.02 20220630Document17 pagesWHITE Beet P Datasheet Rev.1.02 20220630Adarsh100% (1)
- Flight Controller F722-Hd: Quick Start GuideDocument5 pagesFlight Controller F722-Hd: Quick Start GuideGokhan OzdemirNo ratings yet
- Flight Controller F722-Px: Quick Start GuideDocument5 pagesFlight Controller F722-Px: Quick Start GuideGokhan OzdemirNo ratings yet
- Flight Controller F411-Wse: Quick Start GuideDocument3 pagesFlight Controller F411-Wse: Quick Start GuideGokhan OzdemirNo ratings yet
- Flight Controller F722-Se: Basic ManualDocument6 pagesFlight Controller F722-Se: Basic ManualGokhan OzdemirNo ratings yet
- Modifications On v6:: F405 / 5VBEC / Camera Control / 5x UART / Flash / BaroDocument2 pagesModifications On v6:: F405 / 5VBEC / Camera Control / 5x UART / Flash / BarodaniNo ratings yet
- Atmega8hva Atmega16hvaDocument196 pagesAtmega8hva Atmega16hvaPiterKK KosewskiNo ratings yet
- F405-WTE Manual PDFDocument5 pagesF405-WTE Manual PDFBlockFace08No ratings yet
- ATMEGA325PDocument22 pagesATMEGA325PAndrei GradinaruNo ratings yet
- Quick start guide for STM32F765 flight controllerDocument4 pagesQuick start guide for STM32F765 flight controllerGokhan OzdemirNo ratings yet
- COM 02 030 DatasheetDocument14 pagesCOM 02 030 DatasheetpawallerNo ratings yet
- Rak3172-Sip Wisduo Lpwan Sip Datasheet: DescriptionDocument9 pagesRak3172-Sip Wisduo Lpwan Sip Datasheet: DescriptionoliviercorianNo ratings yet
- Omnibus F4 Fireworks FC with 32K Gyro Loop, 5/8V BEC, Hall Sensor & 5 UARTDocument3 pagesOmnibus F4 Fireworks FC with 32K Gyro Loop, 5/8V BEC, Hall Sensor & 5 UARTdaniNo ratings yet
- Stack008 V2Document1 pageStack008 V2Kryštof PaličkaNo ratings yet
- ProMicro8MHzv2 PDFDocument1 pageProMicro8MHzv2 PDFChristhoper TanamasNo ratings yet
- Evaluates: DS28E01/DS28CN01/DS2460 Secure Authentication Starter KitDocument15 pagesEvaluates: DS28E01/DS28CN01/DS2460 Secure Authentication Starter KitWilman LealNo ratings yet
- MSI H110M PRO-VD (VH) MS-7996 r1.0Document47 pagesMSI H110M PRO-VD (VH) MS-7996 r1.0yeneider barliza100% (2)
- NFCDocument8 pagesNFCkorada sai kumarNo ratings yet
- SamProRF Graphical Datasheet UpdatedDocument1 pageSamProRF Graphical Datasheet UpdatedYu-feng LinNo ratings yet
- WTK6900H 24SSDocument10 pagesWTK6900H 24SSRoni AndriaNo ratings yet
- Planos A13 (Q8) DiagramDocument6 pagesPlanos A13 (Q8) DiagramdomisoftNo ratings yet
- OMNIBUS F4 V3 Documentation SpecificationDocument6 pagesOMNIBUS F4 V3 Documentation SpecificationbenitoNo ratings yet
- AP384XG Data SheetDocument13 pagesAP384XG Data Sheetjoseluise68No ratings yet
- Data Sheet Sm220uf1Document21 pagesData Sheet Sm220uf1Malik_123pkNo ratings yet
- APP3_PAD_DDR3_LAYOUTDocument6 pagesAPP3_PAD_DDR3_LAYOUTdomisoftNo ratings yet
- SH79F642B V2.0Document157 pagesSH79F642B V2.0khaled_emamNo ratings yet
- ATmega8 RISC Microcontroller: Interfacing and System Design Using RMCKITDocument60 pagesATmega8 RISC Microcontroller: Interfacing and System Design Using RMCKITRuchit SankhesaraNo ratings yet
- 40-P L - C D T C (4LDTC) : General DescriptionDocument8 pages40-P L - C D T C (4LDTC) : General DescriptionPutri EnjelitaNo ratings yet
- Skytraq-Venus634FLPx DS v051Document18 pagesSkytraq-Venus634FLPx DS v051lahyouhNo ratings yet
- LoRa-E5 Module Datasheet - V1.0Document18 pagesLoRa-E5 Module Datasheet - V1.0Вадим МкртчянNo ratings yet
- HVAC Control Solution PDFDocument16 pagesHVAC Control Solution PDFlinus77No ratings yet
- TX2/TX1 AN310 Carrier Smallest Design for Nvidia Jetson ModulesDocument3 pagesTX2/TX1 AN310 Carrier Smallest Design for Nvidia Jetson ModulessooryaNo ratings yet
- C8051F360 ShortDocument2 pagesC8051F360 ShortMazlan Ab RahimNo ratings yet
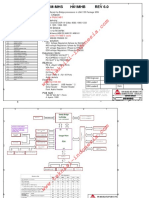
- Biostar H61MHB - IH61M-MHS Rev 6.0Document45 pagesBiostar H61MHB - IH61M-MHS Rev 6.0El TécnicoNo ratings yet
- Sh79f081a PDFDocument100 pagesSh79f081a PDFluis palominoNo ratings yet
- MSI MS-7A15 r1.0Document47 pagesMSI MS-7A15 r1.0Hoàng Tuấn HuyNo ratings yet
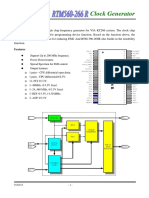
- RTM560 266R RealTekDocument29 pagesRTM560 266R RealTekBillal CosmosNo ratings yet
- HelperBoard A133 Core BoardDocument9 pagesHelperBoard A133 Core BoardRoberNo ratings yet
- Si4464 Datasheet High-Performance, Low-Current TransceiverDocument56 pagesSi4464 Datasheet High-Performance, Low-Current Transceivermsh20_4No ratings yet
- ILI9341 2R8 240x320 Cir ENDocument1 pageILI9341 2R8 240x320 Cir ENBeenish MirzaNo ratings yet
- SH79F085 SinowealthDocument97 pagesSH79F085 SinowealthMiguel RamirezNo ratings yet
- (Esquemas) (2) 7173-2.2-0830-Rohs-7Document1 page(Esquemas) (2) 7173-2.2-0830-Rohs-7Victor Arguello GonzalezNo ratings yet
- DUE-CORE Datasheet V02: 1 SummaryDocument6 pagesDUE-CORE Datasheet V02: 1 SummaryMario OlivaresNo ratings yet
- Foxconn h61mxe-V h61m06 Rev. ADocument45 pagesFoxconn h61mxe-V h61m06 Rev. AĐạt NguyễnNo ratings yet
- UP6281 uPISemiconductorDocument10 pagesUP6281 uPISemiconductorВячеслав ЗагвоцкийNo ratings yet
- AC4602 28-Pin SSOP Chip DatasheetDocument9 pagesAC4602 28-Pin SSOP Chip DatasheetManickaRajaNo ratings yet
- MA6221-Q17K: RF Optical Mouse ControllerDocument8 pagesMA6221-Q17K: RF Optical Mouse ControllerKirlian KitzingerNo ratings yet
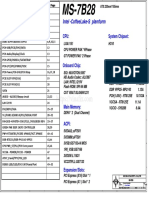
- H310M Pro-M2 MS-7B28 Rev2.1Document53 pagesH310M Pro-M2 MS-7B28 Rev2.1David SuarezNo ratings yet
- REV0.0.3 CYQGWW - GS CarbonV3 PinoutDocument1 pageREV0.0.3 CYQGWW - GS CarbonV3 PinoutLózerLászlóCsabaNo ratings yet
- CPU-Motherboard Block DiagramDocument47 pagesCPU-Motherboard Block DiagramFIX IT33% (3)
- Tire Pressure Monitor Sensor Product Specification: MPXY8300 SeriesDocument165 pagesTire Pressure Monitor Sensor Product Specification: MPXY8300 SeriesNahuel RmNo ratings yet
- ET7190 DataSheet ENDocument239 pagesET7190 DataSheet ENЮрий ЦыганокNo ratings yet
- BITxxRM-LP en ds01.06Document15 pagesBITxxRM-LP en ds01.06АлексейNo ratings yet
- Toshiba Servo Drive PresentationDocument24 pagesToshiba Servo Drive PresentationRSX SNo ratings yet
- Radio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142From EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142No ratings yet
- Ch2T2 Thyristors Reading Reference, Notes and Assignment QuestionsDocument21 pagesCh2T2 Thyristors Reading Reference, Notes and Assignment QuestionsMohammed RadoanNo ratings yet
- Catalogo Rines 22 Mayo 2020Document17 pagesCatalogo Rines 22 Mayo 2020MAURICIO HERRERANo ratings yet
- RVM For LatexDocument19 pagesRVM For LatexWarren BalonaNo ratings yet
- Si 7636 DPDocument12 pagesSi 7636 DPnhbrNo ratings yet
- Analogue Electronics 1.2Document22 pagesAnalogue Electronics 1.2trueNo ratings yet
- Kt-Lcd3: User Manual Ebike Special MeterDocument32 pagesKt-Lcd3: User Manual Ebike Special MeterTom HarkinsNo ratings yet
- Quadband CombinerDocument2 pagesQuadband CombinerAnuradha ThilakarathnaNo ratings yet
- Troubleshoot your Smart-UPS SMT1000RM2U or SMT1500RM2U in under 40 stepsDocument3 pagesTroubleshoot your Smart-UPS SMT1000RM2U or SMT1500RM2U in under 40 stepsMahendra GhadiNo ratings yet
- W79E2051 Chip Controls LED Meteor Shower SimulationDocument2 pagesW79E2051 Chip Controls LED Meteor Shower SimulationLaurentiu IacobNo ratings yet
- Pam 8320Document11 pagesPam 8320Darko GoracinskiNo ratings yet
- TK 40D - Ver2manual 1Document2 pagesTK 40D - Ver2manual 1GigiNo ratings yet
- EET308 PFA Solving Problem 1 GSDocument10 pagesEET308 PFA Solving Problem 1 GSMustafa AlfahadNo ratings yet
- Haltech Dual Channel Wideband Instructions1Document2 pagesHaltech Dual Channel Wideband Instructions1Glenn-anthony Sending-State HortonNo ratings yet
- IRB4600 ROB0109EN J datasheet-Rev.KDocument2 pagesIRB4600 ROB0109EN J datasheet-Rev.KGordon NorfcothNo ratings yet
- Experimental Studies On The Plasma Bullet Propagation and Its InhDocument8 pagesExperimental Studies On The Plasma Bullet Propagation and Its InhvenuanandNo ratings yet
- 250 Watt Mono Amplifier Technical MrigankaDocument2 pages250 Watt Mono Amplifier Technical MrigankaK. RAJA SEKAR100% (1)
- OPGW Our Experience in KESCDocument6 pagesOPGW Our Experience in KESCjorge plaNo ratings yet
- RMS 2V75 - Metrosil Resistor ModuleDocument8 pagesRMS 2V75 - Metrosil Resistor Modulelbk50No ratings yet
- ROM and Its Design Methods: An Overview: Jaspreet Kaur, Srishti Sabharwal, Shabnam Khan, Karan ChauhanDocument7 pagesROM and Its Design Methods: An Overview: Jaspreet Kaur, Srishti Sabharwal, Shabnam Khan, Karan ChauhanJaspreet KaurNo ratings yet
- Maddawat, Jordan: Types of Artificial Light SourcesDocument7 pagesMaddawat, Jordan: Types of Artificial Light Sourcesgimel tenorioNo ratings yet
- Sistec Major Project Report Microcontroller Enabled Speaking System For Deaf and DumbDocument32 pagesSistec Major Project Report Microcontroller Enabled Speaking System For Deaf and Dumbukpandey2580% (5)
- Mitsubishi FX1N 40MR ES UL DatasheetDocument112 pagesMitsubishi FX1N 40MR ES UL DatasheetTrần Hồng VănNo ratings yet
- Technical Guideline For Interconnection of Distributed Generator To Distribution System 2018 PDFDocument105 pagesTechnical Guideline For Interconnection of Distributed Generator To Distribution System 2018 PDFzarulNo ratings yet