You might also like
- Closed Circuit Television: CCTV Installation, Maintenance and OperationFrom EverandClosed Circuit Television: CCTV Installation, Maintenance and OperationRating: 3 out of 5 stars3/5 (2)
- Tabela Blocos PadroesDocument17 pagesTabela Blocos PadroesAlex AlvarengaNo ratings yet
- IC200MDL640Document2 pagesIC200MDL640s_waqarNo ratings yet
- NRT105F061Document6 pagesNRT105F061nawazcNo ratings yet
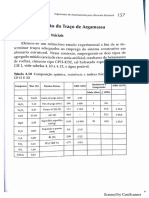
- Traço de ArgamassaDocument7 pagesTraço de ArgamassaRafael Fontana100% (1)
- Manage Devices & Send Photo Reports with Open Source Headwind MDMDocument7 pagesManage Devices & Send Photo Reports with Open Source Headwind MDMyasir hafeez100% (1)
- FE2.1 Data Sheet 1.4 PDFDocument23 pagesFE2.1 Data Sheet 1.4 PDF3degreesNo ratings yet
- Kirisun PT8100-Service-ManualDocument35 pagesKirisun PT8100-Service-ManualRobertino100% (1)
- Thread DataDocument17 pagesThread DatabassNo ratings yet
- Novo Test Amen To - King JamesDocument667 pagesNovo Test Amen To - King Jamesedevaldomilitao100% (3)
- Marathon Norco Battery Maintenance Manual PDFDocument61 pagesMarathon Norco Battery Maintenance Manual PDFJosué GuerreroNo ratings yet
- Beam ExpressDocument17 pagesBeam ExpressCaroline GordonNo ratings yet
- Documents - Pub - Is 802 Part1 Sec1 PDFDocument22 pagesDocuments - Pub - Is 802 Part1 Sec1 PDFSrishti Project ConsultantsNo ratings yet
- Reach M2 M+: RTK GNSS Modules For Precise Navigation and UAV MappingDocument4 pagesReach M2 M+: RTK GNSS Modules For Precise Navigation and UAV Mappingイルヴァン シャーロニNo ratings yet
- Kronos C3 Brochure - April 2016 PDFDocument3 pagesKronos C3 Brochure - April 2016 PDFAris AriyadiNo ratings yet
- Kronos C3 Brochure April 2016Document3 pagesKronos C3 Brochure April 2016Aris AriyadiNo ratings yet
- ACNOVO G9 High Precision GNSS Receiver Specification: Satellite TrackingDocument2 pagesACNOVO G9 High Precision GNSS Receiver Specification: Satellite TrackingLennon NewProjectNo ratings yet
- Galaxy LUS: SpecificationsDocument2 pagesGalaxy LUS: SpecificationsingerulcrissNo ratings yet
- Foxtech Nimbus VTOL V2 For Mapping and Survey (X9D Combo) : User ManualDocument24 pagesFoxtech Nimbus VTOL V2 For Mapping and Survey (X9D Combo) : User ManualAdaNo ratings yet
- Skydroid H12/H12Prouser Manual V1.0Document9 pagesSkydroid H12/H12Prouser Manual V1.0Asdrubal OperacionesNo ratings yet
- TOPFLYtech TLD2-L OBDII Vehicle GPS Tracker User Manual 20210207Document12 pagesTOPFLYtech TLD2-L OBDII Vehicle GPS Tracker User Manual 20210207soledadNo ratings yet
- Manual NIMBUS VTOLDocument23 pagesManual NIMBUS VTOLEwfa RamenNo ratings yet
- Galaxy G1C 440 Canales 1Document2 pagesGalaxy G1C 440 Canales 1carlosNo ratings yet
- SM GP 90 PDFDocument32 pagesSM GP 90 PDFyoppiNo ratings yet
- Galaxy: Smaller Than SmallerDocument2 pagesGalaxy: Smaller Than SmallerAlexis Aguilar AndradeNo ratings yet
- SunNav Catalog 2018 Mar.Document36 pagesSunNav Catalog 2018 Mar.Kate PurnellNo ratings yet
- Share Uav - PSDK102S - M300+M210 - enDocument18 pagesShare Uav - PSDK102S - M300+M210 - enPresa KautsarNo ratings yet
- G1S 3watt - LINUXDocument2 pagesG1S 3watt - LINUXRicardoHumbertoCalbunSanhuezaNo ratings yet
- Brochure Galaxy G1 PlusDocument2 pagesBrochure Galaxy G1 PlusRandy Mucha V.No ratings yet
- Cinebot30 User ManualDocument21 pagesCinebot30 User ManualDavid Higuita RamirezNo ratings yet
- Topcon LegacyDocument2 pagesTopcon LegacyGambitNo ratings yet
- G&EPON 1GE+1FE+WiFi+CATV ONU (V2802W&V2802WT) Introduction - V1.1Document5 pagesG&EPON 1GE+1FE+WiFi+CATV ONU (V2802W&V2802WT) Introduction - V1.1Wilmer RamirezNo ratings yet
- New S86 GNSSDocument2 pagesNew S86 GNSSajzaldivar2679No ratings yet
- B Ird HD Pro SDocument25 pagesB Ird HD Pro SDiego LombardoNo ratings yet
- 000 Qianxun SI SR2 GNSS Receiver - 3 pagesDocument2 pages000 Qianxun SI SR2 GNSS Receiver - 3 pagesali.shaaban1507No ratings yet
- R8882 Correct 8882Document113 pagesR8882 Correct 8882MoketeNo ratings yet
- SparkFun RTK FacetDocument9 pagesSparkFun RTK FacetbyronarreguiNo ratings yet
- Safepilot CAT ROT-I-XT User Guide v4Document17 pagesSafepilot CAT ROT-I-XT User Guide v4Anil KumarNo ratings yet
- E108-GN02D User Manual: GK9501 Positioning ModuleDocument11 pagesE108-GN02D User Manual: GK9501 Positioning ModuleiflavianNo ratings yet
- Mabo Te PoliceDocument107 pagesMabo Te PoliceMokete0% (1)
- DVBT SDR VSDocument17 pagesDVBT SDR VSBenitoCamelaNo ratings yet
- TOPFLYtech TLP1-LF GPS Tracker User ManualDocument14 pagesTOPFLYtech TLP1-LF GPS Tracker User ManualsoledadNo ratings yet
- DeltaQuad EMLID' - WWW - DeltaquadDocument3 pagesDeltaQuad EMLID' - WWW - Deltaquadbigotes bigotonesNo ratings yet
- Gps Tracker Tk300Document8 pagesGps Tracker Tk300yo3gwmNo ratings yet
- Ficha Tecnica Gps Survey E-800Document2 pagesFicha Tecnica Gps Survey E-800Aceg IngenieríaNo ratings yet
- TR7 GNSS RTK Receiver Brochure en 20220224 SDocument1 pageTR7 GNSS RTK Receiver Brochure en 20220224 SGeocentral SurveyNo ratings yet
- FDMAP_FDDOCAPSULE_Rev_ADocument48 pagesFDMAP_FDDOCAPSULE_Rev_Aslam12125No ratings yet
- RTL Sdr4linux Quickstartv10 16Document19 pagesRTL Sdr4linux Quickstartv10 16Javi Hernandez100% (1)
- Dashcam M518H User ManualDocument8 pagesDashcam M518H User ManualFilimone ThumboNo ratings yet
- Designed For Rover: Lightweight and Small-SizeDocument2 pagesDesigned For Rover: Lightweight and Small-SizeFitrawan Pradana KusumaNo ratings yet
- Appendix GDocument46 pagesAppendix GMohammed HassanNo ratings yet
- Cámaras Compatibles BLUE IRISDocument6 pagesCámaras Compatibles BLUE IRISgocs80No ratings yet
- Leica Zeno FLX100 Plus DS 971467 0522Document2 pagesLeica Zeno FLX100 Plus DS 971467 0522MuhamadSadiqNo ratings yet
- Galaxy G1 Plus (IMU) BrochureDocument2 pagesGalaxy G1 Plus (IMU) BrochureHomer Al EmNo ratings yet
- Main Board and Sub Board GuideDocument18 pagesMain Board and Sub Board GuideBruno Camargo100% (1)
- Data Sheet: Leica GS18 IDocument2 pagesData Sheet: Leica GS18 IFaizal Ibnu AdrianNo ratings yet
- TD R10 - ManualDocument15 pagesTD R10 - ManualAhmad JanNo ratings yet
- Cnpilot ™ Home & Small Business Wireless Router: Release Notes For R200X and R201XDocument7 pagesCnpilot ™ Home & Small Business Wireless Router: Release Notes For R200X and R201XprabhatraviNo ratings yet
- IM-TG2-XX002-A01-ALLDocument13 pagesIM-TG2-XX002-A01-ALLDante WilliamsNo ratings yet
- RTL Sdr4linux Quickstartv2 18Document17 pagesRTL Sdr4linux Quickstartv2 18textnoww OPOP100% (1)
- Océano Pacífico: Ecuador ColombiaDocument1 pageOcéano Pacífico: Ecuador ColombiaRicardo A. Cotrina AlbercaNo ratings yet
- Peru Guide Market v2Document10 pagesPeru Guide Market v2Ricardo A. Cotrina AlbercaNo ratings yet
- Océano Pacífico: Ecuador ColombiaDocument1 pageOcéano Pacífico: Ecuador ColombiaRicardo A. Cotrina AlbercaNo ratings yet
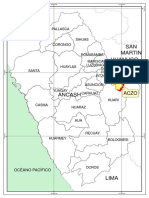
- PROVINCIADocument1 pagePROVINCIARicardo A. Cotrina AlbercaNo ratings yet
- PROVINCIA2Document1 pagePROVINCIA2Ricardo A. Cotrina AlbercaNo ratings yet
- CRD5103 A Owner Manual Engb Es PTBRDocument108 pagesCRD5103 A Owner Manual Engb Es PTBRRicardo A. Cotrina AlbercaNo ratings yet
- PROVINCIADocument1 pagePROVINCIARicardo A. Cotrina AlbercaNo ratings yet
- Using Hec-Georas To Extract Cross Sections From A DTM For Hec/Ras InputDocument15 pagesUsing Hec-Georas To Extract Cross Sections From A DTM For Hec/Ras InputRicardo A. Cotrina AlbercaNo ratings yet
- Balance Hidrico ToclonDocument14 pagesBalance Hidrico ToclonRicardo A. Cotrina AlbercaNo ratings yet
- Laminacion de Avenidas - Ing MiluinDocument465 pagesLaminacion de Avenidas - Ing MiluinRicardo A. Cotrina AlbercaNo ratings yet
- Defensas Ribereña Jequet - 2013Document15 pagesDefensas Ribereña Jequet - 2013Ricardo A. Cotrina AlbercaNo ratings yet
- Datos Meteorologicos - UncDocument1,461 pagesDatos Meteorologicos - UncRicardo A. Cotrina AlbercaNo ratings yet
- Traditional Camera Moves Made Easy With DJI DronesDocument16 pagesTraditional Camera Moves Made Easy With DJI DronesRobeckson GarciaNo ratings yet
- Drone PhotographyDocument16 pagesDrone Photographymariosapereira100% (3)
- Dji Phantom 4 RTK Book F-2Document18 pagesDji Phantom 4 RTK Book F-2Liu Purnomo100% (1)
- Subject: Drone Test: Mavic 2 ProDocument13 pagesSubject: Drone Test: Mavic 2 Projorge gonzalezNo ratings yet
- DJI Terra User Manual v3.6 ENDocument63 pagesDJI Terra User Manual v3.6 ENSergio SabagNo ratings yet
- DJI Mavic Pro Fly More Combo Drone Black (RM 5599) : Product Description Wherever You GoDocument66 pagesDJI Mavic Pro Fly More Combo Drone Black (RM 5599) : Product Description Wherever You GoAhmad Zuhri0% (1)
- Pix4d AndroidDocument12 pagesPix4d AndroidGryffien Gray WalelangNo ratings yet
- Dji VSM User Guide: Ugcs 2.9.929Document15 pagesDji VSM User Guide: Ugcs 2.9.929Raden TunaNo ratings yet
- Surveying - Ebook - Newest - 060421 2Document34 pagesSurveying - Ebook - Newest - 060421 2Mauricio SanchezNo ratings yet
- Data Sheet: Phantom FlexDocument4 pagesData Sheet: Phantom Flexrunze wangNo ratings yet
- Drone Capture Guide enDocument12 pagesDrone Capture Guide enahmedalishNo ratings yet
- Brosur Phantom 4 Pro Obsidian PDFDocument8 pagesBrosur Phantom 4 Pro Obsidian PDFGrojogan RT8No ratings yet
- The Complete Manual: The Essential Handbook For Drone EnthusiastsDocument132 pagesThe Complete Manual: The Essential Handbook For Drone EnthusiastsAlexis78100% (1)
- D-RTK 2 Mobile Base Station SetupDocument20 pagesD-RTK 2 Mobile Base Station Setupjulito free100% (1)
- TERRA Software: Purchase & PreparationDocument5 pagesTERRA Software: Purchase & PreparationZainudin suwardi2No ratings yet
- FPV Hub AVL58: ©2013 DJI Innovations. All Rights Reserved.1Document5 pagesFPV Hub AVL58: ©2013 DJI Innovations. All Rights Reserved.1Fernando TuraniNo ratings yet
- Drones and Aerial ObservationDocument104 pagesDrones and Aerial Observationdancok100% (2)
- Pix4Dmatic 2020Document12 pagesPix4Dmatic 2020AudityaNo ratings yet
- Checklist Dji Phantom 4: Before Going Out TAKEOFF (Item 7-9 Performed by Memory)Document5 pagesChecklist Dji Phantom 4: Before Going Out TAKEOFF (Item 7-9 Performed by Memory)deddytomNo ratings yet
- Phantom 4 Pro Pro Plus User Manual EnglishDocument69 pagesPhantom 4 Pro Pro Plus User Manual EnglishRenato GomesNo ratings yet
- DJI Terra Release Note V3.0.0Document23 pagesDJI Terra Release Note V3.0.0Gianfranco Danna GálvezNo ratings yet
- Dji Phantom 3 ProfessionalDocument2 pagesDji Phantom 3 ProfessionalFitriyani SyahrirNo ratings yet
- DJI Ultimate Flight V3Document87 pagesDJI Ultimate Flight V3Manuel Bernuy CoralNo ratings yet
- Drones-Personal Guide To Drones (2015) - Harry Jones PDFDocument47 pagesDrones-Personal Guide To Drones (2015) - Harry Jones PDFrubens100% (2)
- PHANTOM Quick Start Manual v1.7 enDocument17 pagesPHANTOM Quick Start Manual v1.7 enLuis GuerraNo ratings yet
- Preparation Before Using DJI Terra: Firmware UpgradeDocument9 pagesPreparation Before Using DJI Terra: Firmware UpgradeSebastian Torres FloresNo ratings yet
- 3 DJI Innovations - Managing The Human Capital in A High-Flying CompanyDocument16 pages3 DJI Innovations - Managing The Human Capital in A High-Flying CompanyHitesh MishraNo ratings yet
- Share Uav - PSDK102S - M300+M210 - enDocument18 pagesShare Uav - PSDK102S - M300+M210 - enPresa KautsarNo ratings yet
- Using A Drone and Photogrammetry Software To Create Orthomosaic Images and 3D Models of Aircraft Accident SitesDocument26 pagesUsing A Drone and Photogrammetry Software To Create Orthomosaic Images and 3D Models of Aircraft Accident Sitesbacklever95No ratings yet
- Atom 4 Bands Anti-Drone UAV Jammer DC 12V 82W-2Document2 pagesAtom 4 Bands Anti-Drone UAV Jammer DC 12V 82W-2architNo ratings yet