You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterDocument6 pagesReduction of Harmonic Distortions in BLDC Motor Power Supply Using SEPIC ConverterRahardian TristantoNo ratings yet
- Three phase induction motor using single phase supplyDocument8 pagesThree phase induction motor using single phase supplyhezugNo ratings yet
- An-1048 (1) BLDC Driver LossDocument9 pagesAn-1048 (1) BLDC Driver LossDeepa DevarajNo ratings yet
- IJETR031989Document5 pagesIJETR031989erpublicationNo ratings yet
- Irjet V6i5784 PDFDocument6 pagesIrjet V6i5784 PDFMihir DaveNo ratings yet
- Ass 2 Wind0.02Document25 pagesAss 2 Wind0.02Šämęh ËšśämNo ratings yet
- A Monolithic Current-mode CMOS DC-DC Converter With on-chip Current-sensing TechniqueDocument12 pagesA Monolithic Current-mode CMOS DC-DC Converter With on-chip Current-sensing Techniquesyntan.sinhaNo ratings yet
- Application of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerDocument5 pagesApplication of DC/DC Buck Power Converter in DC Motor For Speed Controlling Using PI ControllerShreeji ExportsNo ratings yet
- Dual ConverterDocument11 pagesDual ConverterRoshan GokheNo ratings yet
- Jacob 2016Document7 pagesJacob 2016TrơNhưNitơNo ratings yet
- ACDC Flyback Converter With A Single SwitchDocument6 pagesACDC Flyback Converter With A Single SwitchJAY S TANDELNo ratings yet
- A Fuzzy Based Single-Stage PFC Half-Bridge Converter For Voltage Controlled Adjustable Speed PMBLDCM DriveDocument8 pagesA Fuzzy Based Single-Stage PFC Half-Bridge Converter For Voltage Controlled Adjustable Speed PMBLDCM DrivePraful YadavNo ratings yet
- Three Phase Motor from Single Phase Using PWM ConverterDocument9 pagesThree Phase Motor from Single Phase Using PWM ConverterSriSruthi KolliparaNo ratings yet
- Iceets 2013 6533563Document9 pagesIceets 2013 6533563Steni MoaiNo ratings yet
- Uc Power Control PDFDocument6 pagesUc Power Control PDFjokerNo ratings yet
- Etco 2017 GRP 8Document3 pagesEtco 2017 GRP 8RohanNo ratings yet
- AN2227Document23 pagesAN2227Ahmed ShoeebNo ratings yet
- Field-Oriented Control Decoupling Network for PWM InvertersDocument5 pagesField-Oriented Control Decoupling Network for PWM InvertersJoseph NoumbissieNo ratings yet
- Comparing The Performance of Bipolar and Unipolar Switching Frequency To Drive DC-AC Inverter PDFDocument6 pagesComparing The Performance of Bipolar and Unipolar Switching Frequency To Drive DC-AC Inverter PDFMiguel C.M.No ratings yet
- Sisngle Phase RectifierDocument5 pagesSisngle Phase RectifiermücahitNo ratings yet
- Sensorless FOC on 8-bit MCUs delivers high-performance motor controlDocument3 pagesSensorless FOC on 8-bit MCUs delivers high-performance motor controlasASasASNo ratings yet
- Design and Execution of A DC Source With High Power and High EfficiencyDocument19 pagesDesign and Execution of A DC Source With High Power and High EfficiencyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- BLDC1Document5 pagesBLDC1elabam39No ratings yet
- Power Electronics Chapter 2-2: Applications of Semiconductor DevicesDocument18 pagesPower Electronics Chapter 2-2: Applications of Semiconductor DevicestesfuNo ratings yet
- Transformer Based Resonant DC Inverter For Brushless DC Motor Drive SystemDocument7 pagesTransformer Based Resonant DC Inverter For Brushless DC Motor Drive SystemStudents Xerox ChidambaramNo ratings yet
- AC Drives and Soft Starters Application GuideDocument5 pagesAC Drives and Soft Starters Application GuideMinh TranNo ratings yet
- Inverters and Applications Requirements of The Final ReportDocument5 pagesInverters and Applications Requirements of The Final ReportHuỳnh BảoNo ratings yet
- Performance Analysis of BLDC Motor Using Basic Switching ConvertersDocument4 pagesPerformance Analysis of BLDC Motor Using Basic Switching Converterscool coolNo ratings yet
- Application Note Design Notes On Precision Phase Locked Speed Control For DC MotorsDocument11 pagesApplication Note Design Notes On Precision Phase Locked Speed Control For DC MotorsVenkatesh KandoorNo ratings yet
- Ramesh 2011Document6 pagesRamesh 2011Hoang Hoang LeNo ratings yet
- Wind turbine power electronics convertersDocument10 pagesWind turbine power electronics convertersŠämęh ËšśämNo ratings yet
- InverterDocument26 pagesInverteravijeet2828No ratings yet
- An Open-Loop Stepper Motor Driver Based On FPGADocument5 pagesAn Open-Loop Stepper Motor Driver Based On FPGADivya JamesNo ratings yet
- M6 - C3 - Lesson 1 - System DevelopmentDocument34 pagesM6 - C3 - Lesson 1 - System DevelopmentsanthoshyeruvakaNo ratings yet
- BLDC Motor Drive Animated PresentationDocument25 pagesBLDC Motor Drive Animated PresentationUsman HaiderNo ratings yet
- BLDC Motor DriverDocument6 pagesBLDC Motor DriverjpmacabascoNo ratings yet
- Sine Inverter Controller With 8 Bit MicrocontrollerDocument8 pagesSine Inverter Controller With 8 Bit MicrocontrollerBillGNo ratings yet
- ProjectDocument5 pagesProjectMohammed Al hennawiNo ratings yet
- Researchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsDocument6 pagesResearchpaper Simulation of Active Front End Converter Based VFD For Induction MotorsAnonymous zmV3UaG0TNo ratings yet
- Implementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationDocument6 pagesImplementation of Single Stage Three Level Power Factor Correction AC-DC Converter With Phase Shift ModulationseventhsensegroupNo ratings yet
- BLDC Motor Open Loop ControlDocument20 pagesBLDC Motor Open Loop ControlShiva SuryaNo ratings yet
- Speed Control of DC Motor Using Dual Converter: Saniya Naseem Zunjani, Amit Shrivastava, Amol BarveDocument4 pagesSpeed Control of DC Motor Using Dual Converter: Saniya Naseem Zunjani, Amit Shrivastava, Amol BarveEdul BrianNo ratings yet
- Special Issue - 2015 International Journal of Engineering Research & Technology (IJERT) Position and Speed Control of BLDC MotorDocument3 pagesSpecial Issue - 2015 International Journal of Engineering Research & Technology (IJERT) Position and Speed Control of BLDC MotorDONE AND DUSTEDNo ratings yet
- Practical Activity 2 DC Shunt Motor PLMDocument9 pagesPractical Activity 2 DC Shunt Motor PLMMarc Jairro GajudoNo ratings yet
- Diode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC ConverterDocument5 pagesDiode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC Convertermanoj kumarNo ratings yet
- REPS 12 PaperDocument7 pagesREPS 12 PaperbharathesecNo ratings yet
- Single Phase Full Bridge Inverter Using Arduino Uno R3 ControllerDocument5 pagesSingle Phase Full Bridge Inverter Using Arduino Uno R3 ControllerolumideNo ratings yet
- Arduino Controlled Single Phase Full Bridge InverterDocument5 pagesArduino Controlled Single Phase Full Bridge InverterRobbi AlamsyahNo ratings yet
- PWM Motor Speed Controller and DC Light Dimmer Circuit GuideDocument16 pagesPWM Motor Speed Controller and DC Light Dimmer Circuit GuideRICHIHOTS2100% (2)
- 5kv InverterDocument30 pages5kv InverterOjobo BlessingNo ratings yet
- Feed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemDocument6 pagesFeed Forward Controller For Compensation of DC-Link Capacitor Unbalance Voltages and Ripple Reduction Based BLDCM Drive SystemSiddharth Jayashekar KNo ratings yet
- Carrier Based Sinusodial PWM Scheme For The Nine Switch ConverterDocument6 pagesCarrier Based Sinusodial PWM Scheme For The Nine Switch ConverterShankar MukalNo ratings yet
- Harmonics and Torque Ripple Reduction of Brushless DC Motor (BLDCM) Using Cascaded H-Bridge Multilevel InverterDocument4 pagesHarmonics and Torque Ripple Reduction of Brushless DC Motor (BLDCM) Using Cascaded H-Bridge Multilevel InverterNirmalaNeeruNo ratings yet
- Battery Charger With PFCDocument4 pagesBattery Charger With PFCNdidi KennethNo ratings yet
- Torque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterDocument5 pagesTorque Ripple Minimization in BLDC Motor Using DC-DC Sepic ConverterShiju RamachandranNo ratings yet
- Boosted MLIDocument8 pagesBoosted MLIAjmal FarooqNo ratings yet
- Zeta Converter Corrects SMPS Power FactorDocument6 pagesZeta Converter Corrects SMPS Power FactorAji SetyawanNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Dlms Server Ocl User ManualDocument26 pagesDlms Server Ocl User ManualManoj kumarNo ratings yet
- Blue Book Ed14 ExcerptDocument278 pagesBlue Book Ed14 ExcerptManoj kumarNo ratings yet
- Dpa422-426 Dpa-Switch Family: Highly Integrated DC-DC Converter Ics For Power Over Ethernet & Telecom ApplicationsDocument34 pagesDpa422-426 Dpa-Switch Family: Highly Integrated DC-DC Converter Ics For Power Over Ethernet & Telecom ApplicationsManoj kumarNo ratings yet
- Dpa422-426 Dpa-Switch Family: Highly Integrated DC-DC Converter Ics For Power Over Ethernet & Telecom ApplicationsDocument34 pagesDpa422-426 Dpa-Switch Family: Highly Integrated DC-DC Converter Ics For Power Over Ethernet & Telecom ApplicationsManoj kumarNo ratings yet
- Bridgeswitch Family Datasheet PDFDocument32 pagesBridgeswitch Family Datasheet PDFRaj Kumar JainNo ratings yet
- Specifications Sheet: VRP Precision PWM Line Conditioners For Machinery, 13% SeriesDocument1 pageSpecifications Sheet: VRP Precision PWM Line Conditioners For Machinery, 13% SeriesManoj kumarNo ratings yet
- Using Dspic30F A/D Converters and The DSP Library For Signal FilteringDocument4 pagesUsing Dspic30F A/D Converters and The DSP Library For Signal FilteringManoj kumarNo ratings yet
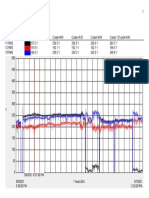
- Min MaxDocument1 pageMin MaxManoj kumarNo ratings yet
- Practical Digital Signal Processing by Dogan IbrahimDocument22 pagesPractical Digital Signal Processing by Dogan IbrahimAriana Ribeiro Lameirinhas50% (10)
- DsPIC30F Family Reference ManualDocument772 pagesDsPIC30F Family Reference Manualthienthuy232No ratings yet
- ACS758xCB: Thermally Enhanced, Fully Integrated, Hall-Effect-Based Linear Current Sensor IC with 100 µΩ Current ConductorDocument22 pagesACS758xCB: Thermally Enhanced, Fully Integrated, Hall-Effect-Based Linear Current Sensor IC with 100 µΩ Current ConductorJúlio C. OliveiraNo ratings yet
- PPP VRp-20000-0230 Install Operate ManualDocument4 pagesPPP VRp-20000-0230 Install Operate ManualManoj kumarNo ratings yet
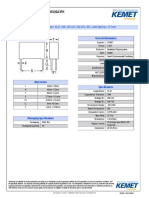
- KEMET Part Number: C4AF1BW5100A3FK: General InformationDocument1 pageKEMET Part Number: C4AF1BW5100A3FK: General InformationantonioNo ratings yet
- KEMET Part Number: C4AF1BW5100A3FK: General InformationDocument1 pageKEMET Part Number: C4AF1BW5100A3FK: General InformationantonioNo ratings yet
- Base Case Analysis Best CaseDocument6 pagesBase Case Analysis Best CaseMaphee CastellNo ratings yet
- Civil Engineering Materials CE-115 by Dr. Muhammad Salik JavaidDocument32 pagesCivil Engineering Materials CE-115 by Dr. Muhammad Salik Javaidfaizankhan23No ratings yet
- M-2 AIS Installation Manual ContentDocument57 pagesM-2 AIS Installation Manual ContentAdi PrasetyoNo ratings yet
- Energy Conservation PDFDocument11 pagesEnergy Conservation PDFSolitónCuánticoNo ratings yet
- Datasheet 1MBH 50D - 60Document5 pagesDatasheet 1MBH 50D - 60jtec08No ratings yet
- Quick Start Guide - QualiPoc AndroidDocument24 pagesQuick Start Guide - QualiPoc AndroidDmitekNo ratings yet
- PROBLEM 7 - CDDocument4 pagesPROBLEM 7 - CDRavidya ShripatNo ratings yet
- Effect of In-Store Shelf Spacing On PurchaseDocument20 pagesEffect of In-Store Shelf Spacing On Purchasesiddeshsai54458No ratings yet
- Presentation 5 1Document76 pagesPresentation 5 1Anshul SinghNo ratings yet
- Simplified Coil DesignDocument6 pagesSimplified Coil DesignNestor Alberto EscalaNo ratings yet
- Cedrix James Estoquia - OLLC Lesson 4.6 Presentation and Interpretation of Data ApplicationDocument4 pagesCedrix James Estoquia - OLLC Lesson 4.6 Presentation and Interpretation of Data ApplicationDeuK WR100% (1)
- Gathering Statistical DataDocument8 pagesGathering Statistical DataianNo ratings yet
- The School and The Community: Prepared By: Sen Xiao Jun Mohana Sundra Segaran Kaviyanayagi PonuduraiDocument26 pagesThe School and The Community: Prepared By: Sen Xiao Jun Mohana Sundra Segaran Kaviyanayagi PonuduraiKaviya SKTDSNo ratings yet
- A Phenomenological Research Design IllustratedDocument15 pagesA Phenomenological Research Design IllustratedMATEI100% (1)
- IEC Developer version 6.n compiler error F1002Document6 pagesIEC Developer version 6.n compiler error F1002AnddyNo ratings yet
- 5.talisayon Chapter 3Document12 pages5.talisayon Chapter 3Jinky Marie TuliaoNo ratings yet
- Green Building by Superadobe TechnologyDocument22 pagesGreen Building by Superadobe TechnologySivaramakrishnaNalluri67% (3)
- EagleBurgmann BT-ARP ENDocument4 pagesEagleBurgmann BT-ARP ENMarin PintarićNo ratings yet
- Chapter 2 ProblemsDocument41 pagesChapter 2 ProblemsPrakasam ArulappanNo ratings yet
- Autodesk Revit 2014 ContentDocument6 pagesAutodesk Revit 2014 ContentGatot HardiyantoNo ratings yet
- Questions Related To Open Channel Flow.Document3 pagesQuestions Related To Open Channel Flow.Mohd AmirNo ratings yet
- PTE - Template - Essay All TypesDocument8 pagesPTE - Template - Essay All TypeskajalNo ratings yet
- Autochief® C20: Engine Control and Monitoring For General ElectricDocument2 pagesAutochief® C20: Engine Control and Monitoring For General ElectricВадим ГаранNo ratings yet
- Skills and Techniques in Counseling Encouraging Paraphrasing and SummarizingDocument35 pagesSkills and Techniques in Counseling Encouraging Paraphrasing and SummarizingjaycnwNo ratings yet
- History of CAD - CAE CompaniesDocument5 pagesHistory of CAD - CAE CompaniesAntonio C. KeithNo ratings yet
- Pore and Formation PressureDocument4 pagesPore and Formation PressureramadhanipdNo ratings yet
- Lesson 4: Mean and Variance of Discrete Random Variable: Grade 11 - Statistics & ProbabilityDocument26 pagesLesson 4: Mean and Variance of Discrete Random Variable: Grade 11 - Statistics & Probabilitynicole MenesNo ratings yet
- H Configurations V12 enDocument37 pagesH Configurations V12 enJerald SlaterNo ratings yet
- SCI 7 Q1 WK5 Solutions A LEA TOMASDocument5 pagesSCI 7 Q1 WK5 Solutions A LEA TOMASJoyce CarilloNo ratings yet
- Activity No.1 in GED 103Document2 pagesActivity No.1 in GED 103Kenneth HerreraNo ratings yet