You might also like
- Empirical Probability FormulaDocument4 pagesEmpirical Probability Formulatutorciecle123No ratings yet
- Bayesian InferenceDocument15 pagesBayesian InferenceArun Prasath100% (1)
- Bayes' Theorem: Probability Theory StatisticsDocument9 pagesBayes' Theorem: Probability Theory StatisticsVanlal KhiangteNo ratings yet
- Bayes Factor (BF)Document13 pagesBayes Factor (BF)muralidharanNo ratings yet
- Bayes' Theorem: Introductory ExampleDocument8 pagesBayes' Theorem: Introductory Examplezhaf azharNo ratings yet
- Bayes TheormDocument14 pagesBayes Theormsagar_srNo ratings yet
- Bayesian-Statistics Final 20140416 3Document38 pagesBayesian-Statistics Final 20140416 3muralidharanNo ratings yet
- Pokrovsky JB PDFDocument25 pagesPokrovsky JB PDFABDIRAZAK MAALNo ratings yet
- Toward Evidence-Based Medical Statistics - 2. The Bayes FactorDocument9 pagesToward Evidence-Based Medical Statistics - 2. The Bayes Factorarifudin_achmadNo ratings yet
- Bayesian InferenceDocument5 pagesBayesian Inferencelishika pargiNo ratings yet
- Bayes Theorem 18-IN-55Document3 pagesBayes Theorem 18-IN-55Faheem WassanNo ratings yet
- MIT18 05S14 Reading20Document7 pagesMIT18 05S14 Reading20Chris SejNo ratings yet
- Bayes' Theorem - WikipediaDocument2 pagesBayes' Theorem - WikipediaBruno Miller TheodosioNo ratings yet
- Multiplication Theorem of ProbabilityDocument4 pagesMultiplication Theorem of Probabilitytutorciecle123No ratings yet
- Bayesian Inference: Statisticat, LLCDocument30 pagesBayesian Inference: Statisticat, LLCLoryTheGamerNo ratings yet
- Ba Yes I An InferenceDocument30 pagesBa Yes I An InferenceLoryTheGamerNo ratings yet
- Background Beliefs in Bayesian InferenceDocument12 pagesBackground Beliefs in Bayesian InferenceColin LewisNo ratings yet
- Preprint of The Book Chapter: "Bayesian Versus Frequentist Inference"Document29 pagesPreprint of The Book Chapter: "Bayesian Versus Frequentist Inference"wtvarNo ratings yet
- Unit 4 Ci 2017Document22 pagesUnit 4 Ci 2017kshpv22No ratings yet
- Bayes TheoremDocument11 pagesBayes Theoremdhiec100% (2)
- Bayeasian Analysis For Political ResearchDocument25 pagesBayeasian Analysis For Political ResearchVero NicaNo ratings yet
- Kerja Kursus Add MatDocument8 pagesKerja Kursus Add MatSyira SlumberzNo ratings yet
- Ellison 2004Document12 pagesEllison 2004Julian Perez-CorreaNo ratings yet
- 311 More Conditional and BayesDocument2 pages311 More Conditional and BayesMohammed ShahabuddinNo ratings yet
- StatsDocument25 pagesStatsVenu KumarNo ratings yet
- Statistics OcenanographyDocument17 pagesStatistics Ocenanographyi333No ratings yet
- EquiprobabilityDocument2 pagesEquiprobabilitydanny222No ratings yet
- Royall 1997Document4 pagesRoyall 1997manresaNo ratings yet
- Brita CadDocument17 pagesBrita CadDeusExMacchiatoNo ratings yet
- Glossary of Statistical TermsDocument20 pagesGlossary of Statistical TermsRobertNo ratings yet
- Hipnotic BayestasDocument30 pagesHipnotic BayestasfmaringotaNo ratings yet
- (Ebook) Introduction To Bayesian Econometrics and Decision TheoryDocument29 pages(Ebook) Introduction To Bayesian Econometrics and Decision TheoryDaniel RangelNo ratings yet
- Unit Iii Bayesian LearningDocument5 pagesUnit Iii Bayesian Learningbravejaya2002No ratings yet
- Greenland 2006Document11 pagesGreenland 2006Dexter BraveNo ratings yet
- Probability and Measurement UncertaintyDocument99 pagesProbability and Measurement UncertaintypticicaaaNo ratings yet
- Unit ViDocument14 pagesUnit ViDr-Kiran Sree PokkuluriNo ratings yet
- Chapter 2 Bayesian Inference: 2.1 Continuous Variables and Eliciting Probability DistributionsDocument15 pagesChapter 2 Bayesian Inference: 2.1 Continuous Variables and Eliciting Probability DistributionsneethiNo ratings yet
- Structural Reliability METHODSDocument56 pagesStructural Reliability METHODSGhassan Abood HabeebNo ratings yet
- Chapter9 PDFDocument28 pagesChapter9 PDFnmukherjee20No ratings yet
- Chapter 9Document28 pagesChapter 9Aniket BatraNo ratings yet
- Easwaran Bayesianism 1Document9 pagesEaswaran Bayesianism 1sebNo ratings yet
- Stat GlossaryDocument20 pagesStat GlossaryAbdullah Ishak KhanNo ratings yet
- Bayesian Prior 1708.07487Document13 pagesBayesian Prior 1708.07487GJNo ratings yet
- Interplay of BayesDocument23 pagesInterplay of BayesDeusExMacchiatoNo ratings yet
- Bay S TheoremDocument4 pagesBay S Theoremapi-162641823No ratings yet
- Unit 2 Two Basic Features of EveryDocument4 pagesUnit 2 Two Basic Features of EveryAnton KortenkoNo ratings yet
- Unit 4 Busniess StatisticsDocument11 pagesUnit 4 Busniess Statisticsk89794No ratings yet
- Alexander Kruel 2010 Guide Bayes TheoremDocument4 pagesAlexander Kruel 2010 Guide Bayes TheoremStamnumNo ratings yet
- Dempster68 Generalization BayesianInferenceDocument31 pagesDempster68 Generalization BayesianInferenceSandeep GogadiNo ratings yet
- Pengolahan Citra Digital3Document10 pagesPengolahan Citra Digital3Ganbatte NeetaNo ratings yet
- Quantum Probabilities As Bayesian ProbabilitiesDocument6 pagesQuantum Probabilities As Bayesian ProbabilitiesmelanocitosNo ratings yet
- MC Cormick Ru Ma 12Document17 pagesMC Cormick Ru Ma 12robinknit2009No ratings yet
- Commentary A Double Robust Approach To Causal Effects in Case-Control StudiesDocument7 pagesCommentary A Double Robust Approach To Causal Effects in Case-Control StudiesBerliana Via AnggeliNo ratings yet
- Chapter8 BayesDocument24 pagesChapter8 BayesTanushree GupatNo ratings yet
- Bayes Formula For Medical Decision MakingDocument6 pagesBayes Formula For Medical Decision MakingcleitonmoyaNo ratings yet
- BR J Philos Sci 2015 Colombo Bjps Axv036Document34 pagesBR J Philos Sci 2015 Colombo Bjps Axv036Eliza PopaNo ratings yet
- Probability TheoryDocument22 pagesProbability TheoryVenu KumarNo ratings yet
- PRu 3Document8 pagesPRu 3Yash ShahNo ratings yet
- Binomial Probability DistributionDocument17 pagesBinomial Probability Distributionsanjay reddyNo ratings yet
- Chap 013Document67 pagesChap 013Bruno MarinsNo ratings yet
- Modern Optimization Techniques in Power SystemsDocument2 pagesModern Optimization Techniques in Power SystemskannanchammyNo ratings yet
- Ques Tions S Olve Ka Rne K I NINJA Technique!: by Gaurav GhatorayDocument16 pagesQues Tions S Olve Ka Rne K I NINJA Technique!: by Gaurav Ghatorayshubham sahuNo ratings yet
- Pre-quiz9-Preview - Case-Control StudiesDocument2 pagesPre-quiz9-Preview - Case-Control StudiesTofik MohammedNo ratings yet
- Chapter 1Document29 pagesChapter 1tain mounNo ratings yet
- INLA RinlaDocument87 pagesINLA RinlaRachmawati RofahNo ratings yet
- Formula Sheet FMDocument3 pagesFormula Sheet FMAbdullah ShahNo ratings yet
- Solution Reilly-Brown Ch-8Document10 pagesSolution Reilly-Brown Ch-8রাসেলআহমেদ50% (2)
- Regresia Multipla (1) - Modelare, Interpretare Si TestareDocument10 pagesRegresia Multipla (1) - Modelare, Interpretare Si TestareDelia RaduNo ratings yet
- Sharpe, Treynor and Jensen MeasuresDocument17 pagesSharpe, Treynor and Jensen MeasuresAbhijeetNo ratings yet
- TVP VarDocument35 pagesTVP VarOğuzhan ÖzçelebiNo ratings yet
- 3GREPDocument885 pages3GREPcmtssikarNo ratings yet
- Chapter 11 - Simulation Models: Page 1Document14 pagesChapter 11 - Simulation Models: Page 1RashaNo ratings yet
- Statistics For Management - 2Document14 pagesStatistics For Management - 2Nandhini P Asst.Prof/MBA100% (3)
- Handout 4 - BUS 309Document26 pagesHandout 4 - BUS 309ahmedeNo ratings yet
- GIBBONS & KUMAR - The Unofficial Solution Manual To A Primer in Game Theory - Unfinished DraftDocument36 pagesGIBBONS & KUMAR - The Unofficial Solution Manual To A Primer in Game Theory - Unfinished DraftLuu BeHl100% (2)
- Tarea 10nestadisticaDocument9 pagesTarea 10nestadisticacamilomelgarejo92No ratings yet
- Calculate Your Risk of RuinDocument3 pagesCalculate Your Risk of Ruinsourabh6chakrabort-1No ratings yet
- Econometrics CRT M2: Regression Model EvaluationDocument7 pagesEconometrics CRT M2: Regression Model EvaluationDickson phiriNo ratings yet
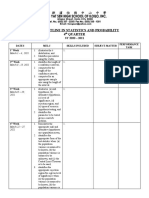
- Course Outline in Statistics and Probability 4 Quarter: Dates Melc Skills Included Subject-Matter Performance Task 1 WeekDocument2 pagesCourse Outline in Statistics and Probability 4 Quarter: Dates Melc Skills Included Subject-Matter Performance Task 1 WeekTiffany Joy Lencioco GambalanNo ratings yet
- mgmt650 Lecture3Document32 pagesmgmt650 Lecture3Leah CastroNo ratings yet
- Prob Expos MooDocument17 pagesProb Expos MooriefardNo ratings yet
- ZXUR 9000 UMTS (V4.15.10.20) Radio Network Controller Performance Counter ReferenceDocument4,107 pagesZXUR 9000 UMTS (V4.15.10.20) Radio Network Controller Performance Counter ReferenceKhải Khà KhàNo ratings yet
- Logit Models of Individual Choices: Thierry Magnac Université de ToulouseDocument7 pagesLogit Models of Individual Choices: Thierry Magnac Université de ToulouseGerald HartmanNo ratings yet
- QMB SolutionsDocument180 pagesQMB SolutionsPierre Rodriguez0% (1)
- S K Mondal: Key: (4) SolDocument40 pagesS K Mondal: Key: (4) SolChaitanya Kishore ChitikenaNo ratings yet
- 271 552 1 SMDocument14 pages271 552 1 SMKadek Chrisappolosta BrainyNo ratings yet
- Module 2 Additional ActivitiesDocument3 pagesModule 2 Additional ActivitiesYell AsiaNo ratings yet
- Evolutionary Game Theory Toulouse School of Economics: J Orgen WeibullDocument34 pagesEvolutionary Game Theory Toulouse School of Economics: J Orgen WeibulljeffNo ratings yet