You might also like
- Arco Asia Diesel 2020Document879 pagesArco Asia Diesel 2020abdullah kozanNo ratings yet
- Operator Manual: Kongsberg SDP (OS)Document395 pagesOperator Manual: Kongsberg SDP (OS)Madalin MoisaNo ratings yet
- Beier Radio - Dynamic Positioning Induction CourseDocument171 pagesBeier Radio - Dynamic Positioning Induction CourseManuel Gomez33% (3)
- User Manual Rolls-Royce Icon (TM) : Dynamic Positioning System Class 2Document226 pagesUser Manual Rolls-Royce Icon (TM) : Dynamic Positioning System Class 2Kvartira VilyyamsaNo ratings yet
- Kongsberg Maritime: Radius 1000 User'S ManualDocument58 pagesKongsberg Maritime: Radius 1000 User'S ManualGonzalo Villalobos Sanchez100% (2)
- Controller EXMP-K32EX-19 Installation Operation ManualDocument53 pagesController EXMP-K32EX-19 Installation Operation ManualSVS SVSNo ratings yet
- FVE830-091-Dynamic Positioning Operations ManualDocument110 pagesFVE830-091-Dynamic Positioning Operations ManualAilton NevesNo ratings yet
- Installation Manual Bandak Light Weight Taut Wire MK 15B: Kongsberg Part No.: 702788Document38 pagesInstallation Manual Bandak Light Weight Taut Wire MK 15B: Kongsberg Part No.: 702788TEUKUNo ratings yet
- DP Operator Manual: Section 10 Hydro Acoustic Position Reference Systems (HPR)Document7 pagesDP Operator Manual: Section 10 Hydro Acoustic Position Reference Systems (HPR)Kunal SinghNo ratings yet
- Kongsberg Maritime: Fanbeam 4.2, Combined Installation, Technical and Operations ManualDocument94 pagesKongsberg Maritime: Fanbeam 4.2, Combined Installation, Technical and Operations ManualSergei Kurpish50% (2)
- Yantai BKJ2 Marine Master-Slave ClockDocument7 pagesYantai BKJ2 Marine Master-Slave ClockFront Crown100% (1)
- Cpos Operator ManualDocument316 pagesCpos Operator ManualJuliana Borges0% (1)
- Kongsberg K-Pos DP Capability and Motion Prediction AnalysisDocument68 pagesKongsberg K-Pos DP Capability and Motion Prediction AnalysisАндрей Питкевич100% (1)
- C-Joy OT Operator Manual 8.1Document209 pagesC-Joy OT Operator Manual 8.1Emannuel Souza100% (3)
- CLH Vertical SilipumpDocument13 pagesCLH Vertical Silipumpriky nurgiantoroNo ratings yet
- Radius 700 - Long Range Battery Operated TransponderDocument2 pagesRadius 700 - Long Range Battery Operated TransponderNishant PandyaNo ratings yet
- NLS Cargo Record Book PDFDocument50 pagesNLS Cargo Record Book PDFAnonymous sSapxstOvh100% (3)
- DP Operations Procedure: BON-PRD-0701.0010-rev.21Document42 pagesDP Operations Procedure: BON-PRD-0701.0010-rev.21AR El Patron KadryNo ratings yet
- Dics 6100 PDFDocument97 pagesDics 6100 PDFGonzalo Villalobos SanchezNo ratings yet
- LTW MK15 Operation Manual - Vol 2 Rev CDocument25 pagesLTW MK15 Operation Manual - Vol 2 Rev Cmolecule112100% (2)
- Taut Wire Operate ManualDocument27 pagesTaut Wire Operate ManualGonzalo Villalobos SanchezNo ratings yet
- DP NotationsDocument5 pagesDP NotationssandeepNo ratings yet
- V 10 WCMBR Sewage Treatment Unit CatalougeSILI PUMPDocument4 pagesV 10 WCMBR Sewage Treatment Unit CatalougeSILI PUMPRokhmatuSivaNo ratings yet
- 11a Taut WireDocument10 pages11a Taut WireFábio GonçalvesNo ratings yet
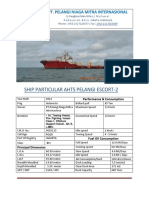
- Ship Particular Ahts-Pe-2Document6 pagesShip Particular Ahts-Pe-2Muhammad RIZALNo ratings yet
- List of Life Saving AppliancesDocument2 pagesList of Life Saving Appliances5t3r3No ratings yet
- OperationManual NavDP4000 v1600.$ - Release-15A b6651 PDFDocument315 pagesOperationManual NavDP4000 v1600.$ - Release-15A b6651 PDFPeterJBloomNo ratings yet
- 6 - Special ApplicationsDocument18 pages6 - Special ApplicationsandreyengNo ratings yet
- OwsDocument10 pagesOwsAnte BudimirNo ratings yet
- Kongsberg K-Pos Track Line Mode: Operator ManualDocument50 pagesKongsberg K-Pos Track Line Mode: Operator ManualMarv-Vic SantosNo ratings yet
- Bilgmon488 Instruction Manual VCDocument23 pagesBilgmon488 Instruction Manual VCLwin PhyoNo ratings yet
- Apos For Hipap Complete ManualDocument131 pagesApos For Hipap Complete ManualAlaa Eldin MohamedNo ratings yet
- Putri Iona - Survey StatusDocument28 pagesPutri Iona - Survey StatusDiana Triswasti KumariNo ratings yet
- VDR HyundaiDocument28 pagesVDR HyundaiDIPIN PNo ratings yet
- Artemis MK V PDFDocument2 pagesArtemis MK V PDFdeepsea74No ratings yet
- Autopilot Nautopilot Np60Document4 pagesAutopilot Nautopilot Np60yogaNo ratings yet
- 04 - DP Consequence AnalysisDocument10 pages04 - DP Consequence AnalysisLeca George100% (2)
- Xws 01327 Taha Assalam Annual DP Trial 2018 - Rev.1-MergedDocument102 pagesXws 01327 Taha Assalam Annual DP Trial 2018 - Rev.1-MergedLi Ann ChungNo ratings yet
- Main Engines Manual Fuel Treatment System Operations ManualDocument33 pagesMain Engines Manual Fuel Treatment System Operations Manualalejandro_roldán_61No ratings yet
- Bollard Pull Standard JIP PDFDocument2 pagesBollard Pull Standard JIP PDFRahmat AnpsNo ratings yet
- Tokyo Keiki IncDocument4 pagesTokyo Keiki IncILHAM PALSU100% (1)
- Confirm Subscription Details - Seastar Demodulators and Kongsberg DPSDocument3 pagesConfirm Subscription Details - Seastar Demodulators and Kongsberg DPSPrzemyslaw SlomaNo ratings yet
- Cy ScanDocument32 pagesCy ScanLi Ann ChungNo ratings yet
- Vecs ManualDocument10 pagesVecs ManualSunil KumarNo ratings yet
- 4 - DP Principles - HMIDocument22 pages4 - DP Principles - HMIandreyengNo ratings yet
- Hipap Instruction ManualDocument209 pagesHipap Instruction ManualCaroline MariaNo ratings yet
- K-Bridge 7.1 Autopilot Operator ManualDocument120 pagesK-Bridge 7.1 Autopilot Operator ManualViệt Dũng Vũ50% (2)
- Kongsberg Cjoy Ot Joystick System: Operator ManualDocument208 pagesKongsberg Cjoy Ot Joystick System: Operator ManualBeni SaputraNo ratings yet
- Smith Berger Shark JawsDocument2 pagesSmith Berger Shark JawsmanjuNo ratings yet
- 300 X 80 X 18 FT Flat Barge Rev.0: Deck Load 7.0 Ton/M2Document2 pages300 X 80 X 18 FT Flat Barge Rev.0: Deck Load 7.0 Ton/M2didinurielia100% (2)
- Furuno SSB Operator's Manual PDFDocument222 pagesFuruno SSB Operator's Manual PDFandersonpauser100% (1)
- CS3000 Service v6 E5 09 1 EDocument83 pagesCS3000 Service v6 E5 09 1 EHarman SandhuNo ratings yet
- Walker 7070Document2 pagesWalker 7070bobNo ratings yet
- Rolls-Royce Rotary Vane Steering Gear: Technical Data SheetDocument1 pageRolls-Royce Rotary Vane Steering Gear: Technical Data SheetElena BajuNo ratings yet
- Techcross Electro-Cleen Operation - Maintenance - andSafetyManual (OMSM) - Rev. 0.1 - Dated April 21 - 2018Document250 pagesTechcross Electro-Cleen Operation - Maintenance - andSafetyManual (OMSM) - Rev. 0.1 - Dated April 21 - 2018Panda Radu100% (1)
- 02a DP Position WeightingDocument9 pages02a DP Position WeightingFábio GonçalvesNo ratings yet
- Loading PlanDocument6 pagesLoading PlanIordache Dumitru100% (1)
- Sailor 6110 Mini C Gmdss User ManualDocument134 pagesSailor 6110 Mini C Gmdss User ManualborisgolodenkoNo ratings yet
- Marine VHF Radio Telephone Operation Manual STR-6000D: Samyungenc Co.,LtdDocument64 pagesMarine VHF Radio Telephone Operation Manual STR-6000D: Samyungenc Co.,LtdMahfooz AliNo ratings yet
- Dynamic Postioning SystemDocument50 pagesDynamic Postioning Systempraveen_meo1No ratings yet
- Imca m190 Rev.1 (Cat A B C)Document4 pagesImca m190 Rev.1 (Cat A B C)Xa MauNo ratings yet
- Furuno GPS GP150Document105 pagesFuruno GPS GP150Akin OnalNo ratings yet
- Annexure 2Document2 pagesAnnexure 2Anoop DamodaranNo ratings yet
- Slvu 930Document20 pagesSlvu 930pabloNo ratings yet
- KHF Series Fan CurvesDocument3 pagesKHF Series Fan CurvesGonzalo Villalobos SanchezNo ratings yet
- Catalogo Adaptadores HidraulicosDocument97 pagesCatalogo Adaptadores HidraulicosGonzalo Villalobos SanchezNo ratings yet
- D3 - DPS Evc CDocument2 pagesD3 - DPS Evc CGonzalo Villalobos SanchezNo ratings yet
- HTML-Maersk-Implementer-1765Document2 pagesHTML-Maersk-Implementer-1765Gonzalo Villalobos SanchezNo ratings yet
- Load Sharing Module: ApplicationsDocument2 pagesLoad Sharing Module: ApplicationsGonzalo Villalobos SanchezNo ratings yet
- B31003500TCBRA3 Seastar Corrections Over Fleet BroadbandDocument2 pagesB31003500TCBRA3 Seastar Corrections Over Fleet BroadbandGonzalo Villalobos SanchezNo ratings yet
- En SNR 1206Document3 pagesEn SNR 1206Gonzalo Villalobos SanchezNo ratings yet
- ELECTROLUX Compass Control Electrolux MacedoniaDocument2 pagesELECTROLUX Compass Control Electrolux MacedoniaGonzalo Villalobos SanchezNo ratings yet
- Laundry Program Manager - ESTE ES BUENODocument1 pageLaundry Program Manager - ESTE ES BUENOGonzalo Villalobos SanchezNo ratings yet
- LG 32ld350-Ub Chassis La04a Exploded SCHDocument20 pagesLG 32ld350-Ub Chassis La04a Exploded SCHGonzalo Villalobos SanchezNo ratings yet
- Cyscan Engineer PDFDocument35 pagesCyscan Engineer PDFGonzalo Villalobos SanchezNo ratings yet
- Taut Wire Operate ManualDocument27 pagesTaut Wire Operate ManualGonzalo Villalobos SanchezNo ratings yet
- Marine Radar: 1932 MARK-2/1942 MARK-2Document52 pagesMarine Radar: 1932 MARK-2/1942 MARK-2Gonzalo Villalobos SanchezNo ratings yet
- Wireline Logging OperationsDocument15 pagesWireline Logging Operationsgladwin CorreiaNo ratings yet
- Shopdrawing Baja PDFDocument13 pagesShopdrawing Baja PDFFatahullaNo ratings yet
- 2021 S4 Emath (Bring Home Exam) Emath Test 1Document12 pages2021 S4 Emath (Bring Home Exam) Emath Test 1George ChooNo ratings yet
- Managing White Tails in Louisiana (Excerpts)Document14 pagesManaging White Tails in Louisiana (Excerpts)Louisiana Department of Wildlife and Fisheries100% (3)
- Dioxid de Clor DWT Technical DiscussionDocument16 pagesDioxid de Clor DWT Technical DiscussionAdrian BorsosNo ratings yet
- Internship Report On Industrial Training at Shangri-La BangaluruDocument6 pagesInternship Report On Industrial Training at Shangri-La BangaluruGEETANSH ARORANo ratings yet
- Etruscan GlossaryDocument78 pagesEtruscan GlossaryNenad RawNo ratings yet
- The Weathering Aircraft Issue 15 - Grease & DirtDocument64 pagesThe Weathering Aircraft Issue 15 - Grease & DirtDmitry MezhinskyNo ratings yet
- Still Om Pimespo Forklift Transmission Pst2 Repair Manual 41568042305Document23 pagesStill Om Pimespo Forklift Transmission Pst2 Repair Manual 41568042305garrettmartinez090198pxz100% (125)
- 520 - MPC Plate Chiller BulletinDocument4 pages520 - MPC Plate Chiller BulletinThanh Van LeNo ratings yet
- Evo BioDocument30 pagesEvo BioShareeze GomezNo ratings yet
- Low Voltage Duct Banks: Key PlanDocument1 pageLow Voltage Duct Banks: Key PlanFathy RamadanNo ratings yet
- Offering Memorandum: Hilton Garden Inn Shreveport - Hampton Inn & Suites NatchezDocument38 pagesOffering Memorandum: Hilton Garden Inn Shreveport - Hampton Inn & Suites Natchezmymle1No ratings yet
- Definition:: Pleural EffusionDocument4 pagesDefinition:: Pleural EffusionGetom NgukirNo ratings yet
- Probability Group 5Document3 pagesProbability Group 5Antoinette Nopia BienNo ratings yet
- Part 4 Physical ScienceDocument9 pagesPart 4 Physical Sciencejerick de veraNo ratings yet
- Plastics Material Selection Criteria: BY N.Mohan Kumar Cipet ChennaiDocument16 pagesPlastics Material Selection Criteria: BY N.Mohan Kumar Cipet ChennaisouravNo ratings yet
- Conservation-Agriculture en LRDocument46 pagesConservation-Agriculture en LRAZIZRAHMANABUBAKARNo ratings yet
- New Solutions For Cable: David Mitchinson Solutions Manager Paal Gulbrandsen Regional Account ManagerDocument53 pagesNew Solutions For Cable: David Mitchinson Solutions Manager Paal Gulbrandsen Regional Account ManagerVíctor Maya100% (1)
- Moto XT2019-X Service BOM: Revision HistoryDocument71 pagesMoto XT2019-X Service BOM: Revision Historyfreshjoint100% (2)
- 3rd Summative AssessmentDocument4 pages3rd Summative AssessmentAngelina TagleNo ratings yet
- A Method For Writing Essays About LiteratureDocument8 pagesA Method For Writing Essays About Literatureiygcdknbf100% (2)
- Project Report ABC PlasticsDocument6 pagesProject Report ABC PlasticsPankaj ShrivastavaNo ratings yet
- Similar PaperDocument8 pagesSimilar Papertech guruNo ratings yet
- HVDC TransmissionDocument14 pagesHVDC TransmissionAxay ShahNo ratings yet
- Day 1Document60 pagesDay 1Ricardo VelozNo ratings yet
- B2 Listening 11Document1 pageB2 Listening 11Juan MiguelNo ratings yet
- Mohr Stress Circle Exercise-KrDocument8 pagesMohr Stress Circle Exercise-KrFelipe Camacho HurtadoNo ratings yet