You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- CCIE Enterprise Infrastructure - A Complete Guide: Authored byDocument655 pagesCCIE Enterprise Infrastructure - A Complete Guide: Authored byRgey Aadas100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Predicting Life Expectancy Using Machine LearningDocument9 pagesPredicting Life Expectancy Using Machine LearningBhavya Singh100% (1)
- To BuffersDocument65 pagesTo Bufferssanafayaz12No ratings yet
- BSC FypDocument30 pagesBSC Fypsanafayaz12No ratings yet
- Control of 3-Leg 4-Wire Inverter With Passive LC Output Filter Operating With Nonlinear Unbalanced LoadDocument6 pagesControl of 3-Leg 4-Wire Inverter With Passive LC Output Filter Operating With Nonlinear Unbalanced Loadsanafayaz12No ratings yet
- Electronics 07 00062Document19 pagesElectronics 07 00062sanafayaz12No ratings yet
- Sciencedirect: © 2019, Ifac (International Federation of Automatic Control) Hosting by Elsevier Ltd. All Rights ReservedDocument6 pagesSciencedirect: © 2019, Ifac (International Federation of Automatic Control) Hosting by Elsevier Ltd. All Rights Reservedsanafayaz12No ratings yet
- Reconfiguration of MV Distribution Networks With Multicost and Multipoint Alternative Supply, Part II Reconfiguration Plan 2017490216Document7 pagesReconfiguration of MV Distribution Networks With Multicost and Multipoint Alternative Supply, Part II Reconfiguration Plan 2017490216sanafayaz12No ratings yet
- Visual Programming by Dr. Hikmat Ullah KhanDocument14 pagesVisual Programming by Dr. Hikmat Ullah Khansanafayaz12No ratings yet
- Small Scale Propagation Model: Dr. Zeeshan Kaleem EE Department, CIIT WahDocument37 pagesSmall Scale Propagation Model: Dr. Zeeshan Kaleem EE Department, CIIT Wahsanafayaz12No ratings yet
- Assembly Language For Intel-Based Computers, 4 EditionDocument55 pagesAssembly Language For Intel-Based Computers, 4 Editionsanafayaz12No ratings yet
- Life Long Learning Competencies: Program For EngineersDocument15 pagesLife Long Learning Competencies: Program For Engineerssanafayaz12No ratings yet
- Lecture 4 DBDocument27 pagesLecture 4 DBsanafayaz12No ratings yet
- Production and Service Planning II Case Study Macpherson Refrigeration Limited PDFDocument15 pagesProduction and Service Planning II Case Study Macpherson Refrigeration Limited PDFArth GuptaNo ratings yet
- ABB Serial Data ConvertersDocument13 pagesABB Serial Data ConvertersRodrigo Valdez CuellarNo ratings yet
- Complete VBDocument159 pagesComplete VBpraveen1510No ratings yet
- Title of The Project: Existing SystemDocument3 pagesTitle of The Project: Existing SystemvanamgouthamNo ratings yet
- Cyber Crime Theoretical FrameworkDocument58 pagesCyber Crime Theoretical FrameworkReonel Ferreria50% (8)
- Curriculum Vitae - Thuso MolefeDocument3 pagesCurriculum Vitae - Thuso MolefeThuso Keabetswe Eric MolefeNo ratings yet
- National Instruments Products For Wind Turbine Condition MonitoringDocument4 pagesNational Instruments Products For Wind Turbine Condition MonitoringMatheus ZegattiNo ratings yet
- Goldwind 15MW Product Brochure 2013Document6 pagesGoldwind 15MW Product Brochure 2013Oswaldo MuñozNo ratings yet
- EPE 321 StudyGuide 2017Document17 pagesEPE 321 StudyGuide 2017Ryan SchultzeNo ratings yet
- DC DC Converter Validation For Battery Electric Vehicle Using HILSDocument24 pagesDC DC Converter Validation For Battery Electric Vehicle Using HILSxlnc1No ratings yet
- User Guide Guide de L'utilisateur Guía Del Usuario Manual Do UsuárioDocument16 pagesUser Guide Guide de L'utilisateur Guía Del Usuario Manual Do UsuárioStefany CarrilloNo ratings yet
- ISO 27001 2013 Vs ISO 20000 2011 Matrix EN PDFDocument10 pagesISO 27001 2013 Vs ISO 20000 2011 Matrix EN PDFthelmo jarrinNo ratings yet
- Clarity Visual Control Station: Video Wall ProcessorDocument4 pagesClarity Visual Control Station: Video Wall ProcessorHa MzaNo ratings yet
- Certified Optical Network Training Programme GuideDocument2 pagesCertified Optical Network Training Programme Guiderikii80No ratings yet
- Crackwise ArticleDocument8 pagesCrackwise ArticleYarko YurechkoNo ratings yet
- Wharfedale Xarus 5000Document5 pagesWharfedale Xarus 5000tomika432No ratings yet
- Reflection QuestionsDocument3 pagesReflection Questionsapi-530087883No ratings yet
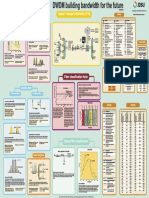
- DWDM Impairments Optical Transport Networks (OTN) : Linear EffectsDocument1 pageDWDM Impairments Optical Transport Networks (OTN) : Linear Effectskapil dev pandeyNo ratings yet
- Class Element El1, El2, El3: Selector Example SelectsDocument1 pageClass Element El1, El2, El3: Selector Example SelectsElvis KadicNo ratings yet
- Laporan 4 Simple Audio Amplifier PDFDocument9 pagesLaporan 4 Simple Audio Amplifier PDFAzman HanafiahNo ratings yet
- A Distributed Power Control of Series-Connected Module-Integrated Inverters For PV Grid-Tied ApplicationsDocument5 pagesA Distributed Power Control of Series-Connected Module-Integrated Inverters For PV Grid-Tied ApplicationsBrightworld ProjectsNo ratings yet
- Exhibit J Examples of Ff&E and Os&EDocument10 pagesExhibit J Examples of Ff&E and Os&ERafiek ZaherNo ratings yet
- Bionano Compute On Demand Flyer 1 1Document2 pagesBionano Compute On Demand Flyer 1 1muhammadakhtar201No ratings yet
- ABS MOC Guidance NotesDocument60 pagesABS MOC Guidance NotesElla AgbettorNo ratings yet
- The Sims 4 CheatsDocument3 pagesThe Sims 4 Cheatscg97No ratings yet
- Training and Placement Cell AbstractDocument5 pagesTraining and Placement Cell AbstractTelika Ramu100% (1)
- Usermanual Leica Ultra Locators and Generators v1-0-1Document132 pagesUsermanual Leica Ultra Locators and Generators v1-0-1Mohamed AbdelattyNo ratings yet
- TSS 30 - Application Form - SODocument4 pagesTSS 30 - Application Form - SOkemvanNo ratings yet