You might also like
- Physics Module Form 4 Teachers' Guide Chapter 2: Force and MotionDocument44 pagesPhysics Module Form 4 Teachers' Guide Chapter 2: Force and MotionCikgu Zul Zacherry85% (13)
- Modelling and Analysis of Flexure Based Compliant MicrogripperDocument9 pagesModelling and Analysis of Flexure Based Compliant MicrogripperMalek SghaierNo ratings yet
- Development of A Pantograph Based Micro Machine For Nano ScratchingDocument9 pagesDevelopment of A Pantograph Based Micro Machine For Nano ScratchingSoumen MandalNo ratings yet
- Preliminary Design of A Three-Finger Underactuated Adaptive End Effector With A Breakaway Clutch MechanismDocument8 pagesPreliminary Design of A Three-Finger Underactuated Adaptive End Effector With A Breakaway Clutch MechanismSelva LakshmiNo ratings yet
- Design and Development of A Low-Cost Exure-Based Hand-Held Mechanism For MicromanipulationDocument7 pagesDesign and Development of A Low-Cost Exure-Based Hand-Held Mechanism For MicromanipulationDamián Cortina LópezNo ratings yet
- Design and Fabrication of Automated Sand Filter and Waste Separator MachineDocument6 pagesDesign and Fabrication of Automated Sand Filter and Waste Separator MachineIJRASETPublicationsNo ratings yet
- Flwchart Bab3 SSRN-id4255407Document27 pagesFlwchart Bab3 SSRN-id4255407Insannul HakimNo ratings yet
- A Simple and Effective Dynamic ModelingDocument6 pagesA Simple and Effective Dynamic ModelingToufique YalsangikarNo ratings yet
- Additively Manufactured Custom Soft GripperDocument10 pagesAdditively Manufactured Custom Soft GripperRuhan TahirNo ratings yet
- Review: The Re-Configurable Robotic Gripper Design, Dynamics, and ControlDocument20 pagesReview: The Re-Configurable Robotic Gripper Design, Dynamics, and ControlTJPRC PublicationsNo ratings yet
- Flank Wear + Surface RoughnessDocument16 pagesFlank Wear + Surface Roughnessfirdauz 97No ratings yet
- Optimizing Design of Piezoelectric Actuated Compliant Microgripper MechanismDocument4 pagesOptimizing Design of Piezoelectric Actuated Compliant Microgripper Mechanismvinnu162No ratings yet
- Chatter Stability Prediction in High-Speed Micromilling of Ti6Al4V Via Finite Element Based Microend Mill DynamicsDocument12 pagesChatter Stability Prediction in High-Speed Micromilling of Ti6Al4V Via Finite Element Based Microend Mill Dynamicssundaramaks saravana muruganNo ratings yet
- 3D Printing of Robotic Soft Actuators WithDocument9 pages3D Printing of Robotic Soft Actuators WithPringgo Widyo LaksonoNo ratings yet
- Modeling and Simulation of Wear in A Pin On Disc TribometerDocument10 pagesModeling and Simulation of Wear in A Pin On Disc Tribometergoldy243usNo ratings yet
- Fahim 2020Document5 pagesFahim 2020senthilNo ratings yet
- PID367463Document4 pagesPID367463Lucas TorquatoNo ratings yet
- IJREI - Fabrication and Analysis of Spring Testing MachineDocument6 pagesIJREI - Fabrication and Analysis of Spring Testing MachineIjrei JournalNo ratings yet
- A Novel Multi Objective Constraints Based Industrial Gripper Design With Optimized Stiffness For Object GraspingDocument14 pagesA Novel Multi Objective Constraints Based Industrial Gripper Design With Optimized Stiffness For Object GraspingtayzarlwintunNo ratings yet
- Robotic End Effector Using 4-ReportDocument39 pagesRobotic End Effector Using 4-Reportkarthikds91100% (3)
- MicroMachiningTechAssessment 0209 TECHDocument239 pagesMicroMachiningTechAssessment 0209 TECHds_srinivasNo ratings yet
- Surface Replication in Micro Injection MoldingDocument30 pagesSurface Replication in Micro Injection MoldingvenkithankamNo ratings yet
- A Topology-Optimized 3D Printed Compliant Finger With Flex Sensor For Adaptive Grasping of Unknown ObjectsDocument6 pagesA Topology-Optimized 3D Printed Compliant Finger With Flex Sensor For Adaptive Grasping of Unknown ObjectsRenato NoalNo ratings yet
- Air-Damped Microresonators With Enhanced Quality FactorDocument10 pagesAir-Damped Microresonators With Enhanced Quality Factorapi-3793067No ratings yet
- Nazemzadeh (2022) - Computing The Bond Strength of 3D Printed Polylactic Acid Scaffolds in Mode I and II Using Experimental Tests, Finite Element Method and Cohesive Zone ModelingDocument17 pagesNazemzadeh (2022) - Computing The Bond Strength of 3D Printed Polylactic Acid Scaffolds in Mode I and II Using Experimental Tests, Finite Element Method and Cohesive Zone ModelingIgnacio VillaNo ratings yet
- Beloglazov 2018 J. Phys. Conf. Ser. 1118 012007Document10 pagesBeloglazov 2018 J. Phys. Conf. Ser. 1118 012007Chaudhary MundhaliaNo ratings yet
- Machining of Micro Dimles For Friction Reduction in Cylinder LinersDocument5 pagesMachining of Micro Dimles For Friction Reduction in Cylinder LinersSHARANYA ADIGANo ratings yet
- 1 s2.0 S2214785320343170 MainDocument8 pages1 s2.0 S2214785320343170 MainXhoniNo ratings yet
- Deepak CVDocument7 pagesDeepak CVdeepakmitrNo ratings yet
- Guo 2013Document8 pagesGuo 2013Saood AliNo ratings yet
- Prosthetic Hand Paper68Document7 pagesProsthetic Hand Paper68Franck LeonelNo ratings yet
- Pipe Inspection RobotDocument7 pagesPipe Inspection RobotSharanabasappa SajjanNo ratings yet
- International Journal of Machine Tools & Manufacture: S.M. Afazov, S.M. Ratchev, J. Segal, A.A. PopovDocument11 pagesInternational Journal of Machine Tools & Manufacture: S.M. Afazov, S.M. Ratchev, J. Segal, A.A. PopovGanesh K CNo ratings yet
- Design and Finite Element Analysis of Broaching Tools: A.V. Pradeep, K. Ram Prasad, T. Victor BabuDocument8 pagesDesign and Finite Element Analysis of Broaching Tools: A.V. Pradeep, K. Ram Prasad, T. Victor BabuSanchit SinglaNo ratings yet
- Design and Analysis of Two-Link Discrete Flexible ManipulatorDocument13 pagesDesign and Analysis of Two-Link Discrete Flexible ManipulatorDuc AnhNo ratings yet
- Actuators: Design of Soft Origami Mechanisms With Targeted SymmetriesDocument16 pagesActuators: Design of Soft Origami Mechanisms With Targeted SymmetriesOrigami toturial by AbhijeetNo ratings yet
- Computing The Bond Strength of 3D Printed PolylactDocument18 pagesComputing The Bond Strength of 3D Printed Polylactashutosh.2022cc09No ratings yet
- Song2017 PDFDocument6 pagesSong2017 PDFNigus TeklehaymanotNo ratings yet
- Kolekar 2019Document19 pagesKolekar 2019Naresh JonnaNo ratings yet
- Uncertainty Determination of A Novel Single F - 2022 - CIRP Journal of ManufactuDocument13 pagesUncertainty Determination of A Novel Single F - 2022 - CIRP Journal of ManufactuMark RNo ratings yet
- A Brief Review On Modeling Approaches of Friction Dampers Used in TurbomachineryDocument13 pagesA Brief Review On Modeling Approaches of Friction Dampers Used in TurbomachineryUtku Arda TöreNo ratings yet
- 1 s2.0 S2212827123003347 MainDocument6 pages1 s2.0 S2212827123003347 MainnetamentenetoNo ratings yet
- 1 s2.0 S2214785322045953 MainDocument7 pages1 s2.0 S2214785322045953 Mainmarkpoland21No ratings yet
- Pulsed PDFDocument13 pagesPulsed PDFrajeshNo ratings yet
- Liu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1043 032037Document11 pagesLiu 2021 IOP Conf. Ser. Mater. Sci. Eng. 1043 032037ntik 23No ratings yet
- Research ArticleDocument14 pagesResearch ArticleWajdi ben mohamedNo ratings yet
- Adaptive Design of A Universal Automotive Ball Joint Separating Device PDFDocument11 pagesAdaptive Design of A Universal Automotive Ball Joint Separating Device PDFUbakamma ChrisNo ratings yet
- Compliant Manipulators Springer 2014Document64 pagesCompliant Manipulators Springer 2014Alejandro GastonNo ratings yet
- Machining Subsurface Deformation Under Various Rake Angles 2022 Procedia CIRDocument5 pagesMachining Subsurface Deformation Under Various Rake Angles 2022 Procedia CIRlelag96085No ratings yet
- IRJET V6I5165rahularghodeDocument5 pagesIRJET V6I5165rahularghodeSebin MathewNo ratings yet
- Design and Finite Elements Analysis of A Hydraulic Excavator's Robot Arm SystemDocument10 pagesDesign and Finite Elements Analysis of A Hydraulic Excavator's Robot Arm SystemHung VuNo ratings yet
- A Case Study On Design of A Flywheel For Punching Press OperationDocument4 pagesA Case Study On Design of A Flywheel For Punching Press OperationAnkit BhadesiaNo ratings yet
- Continuum ManipulatorDocument10 pagesContinuum Manipulatormb.farooqui02No ratings yet
- Design Blades of A Wind Turbine Using Flexible Multibody ModellingDocument8 pagesDesign Blades of A Wind Turbine Using Flexible Multibody Modellingsrinath_iitmNo ratings yet
- A Brief Review On Micromachining of MaterialsDocument6 pagesA Brief Review On Micromachining of Materialsprasanth kNo ratings yet
- 1903 10939 PDFDocument34 pages1903 10939 PDFEd Gar YundaNo ratings yet
- Mechanical Design, Analysis and Testing of A Large-Range Compliant MicrogripperDocument8 pagesMechanical Design, Analysis and Testing of A Large-Range Compliant MicrogripperHo Nhat LinhNo ratings yet
- Mechanical Design, Analysis and Testing of A Large-Range Compliant MicrogripperDocument8 pagesMechanical Design, Analysis and Testing of A Large-Range Compliant MicrogripperraghulthoppaeNo ratings yet
- Printflatables Udayan PDFDocument12 pagesPrintflatables Udayan PDFparatinadanaNo ratings yet
- Schneider2019 Article SustainabilityInUltraPrecisionDocument10 pagesSchneider2019 Article SustainabilityInUltraPrecisionMOHAN KUMARNo ratings yet
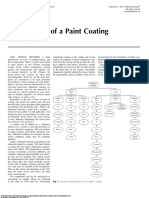
- Composition of A Paint CoatingDocument7 pagesComposition of A Paint CoatingJefferson ChavarríaNo ratings yet
- WO 2010/121846 Al: Intellectual (10) InternationalDocument18 pagesWO 2010/121846 Al: Intellectual (10) InternationalJefferson ChavarríaNo ratings yet
- US7431364Document7 pagesUS7431364Jefferson ChavarríaNo ratings yet
- Characterization and Operation of A Mechanically Actuated Silicon MicrogripperDocument6 pagesCharacterization and Operation of A Mechanically Actuated Silicon MicrogripperJefferson ChavarríaNo ratings yet
- Design Hi eFF Centri BlowerDocument123 pagesDesign Hi eFF Centri BlowerJo PastorNo ratings yet
- Omni-Directional Drive and Mecanum PresentationDocument22 pagesOmni-Directional Drive and Mecanum PresentationRafael Ramírez Medina100% (1)
- Engineering Mechanics (GE6253) Two Marks ALL UNITS PDFDocument30 pagesEngineering Mechanics (GE6253) Two Marks ALL UNITS PDFVignesh Vicky94% (16)
- IS241 - Lecture-5 Heat EquationsDocument39 pagesIS241 - Lecture-5 Heat EquationskibagefourjeyNo ratings yet
- Aade 10 DF Ho 26Document9 pagesAade 10 DF Ho 26Trần Anh ĐứcNo ratings yet
- Lecture 4B.5: Calculation Examples: Example 1 Critical Temperature of Tension MemberDocument4 pagesLecture 4B.5: Calculation Examples: Example 1 Critical Temperature of Tension MemberTest NameNo ratings yet
- Linear ExpansionDocument2 pagesLinear ExpansionEzekiel ArtetaNo ratings yet
- LG - PSHSCVC - Grade10 - Physics2 - Current, Resistance, Ohm's LawDocument10 pagesLG - PSHSCVC - Grade10 - Physics2 - Current, Resistance, Ohm's LawqwertyNo ratings yet
- Hydro 36 37 PDFDocument24 pagesHydro 36 37 PDFMuhammad Rafi RenaldyNo ratings yet
- 3rd Quarter ReviewDocument76 pages3rd Quarter ReviewTina GuzmanNo ratings yet
- Inverted-T Capacity Calculation@Phase1v2Document11 pagesInverted-T Capacity Calculation@Phase1v2satyaNo ratings yet
- Fundamentals of Stress Analysis ConclusionDocument11 pagesFundamentals of Stress Analysis ConclusionAbdel Hamied EbrahemNo ratings yet
- Finite Element Shakedown Analysis of Reinforced Concrete 3D FramesDocument13 pagesFinite Element Shakedown Analysis of Reinforced Concrete 3D Framesjuan carlos molano toroNo ratings yet
- Simulation Investigation - Ballistic PendulumDocument3 pagesSimulation Investigation - Ballistic PendulumpixelhoboNo ratings yet
- The Aero and Hydromechanics of Keel Yachts PDFDocument645 pagesThe Aero and Hydromechanics of Keel Yachts PDFLorenzo VoltaNo ratings yet
- Microsoft Word - Project ReportDocument53 pagesMicrosoft Word - Project ReportVasanth AradhyaNo ratings yet
- Electromagnetic InductionDocument30 pagesElectromagnetic InductionAmitabh MahapatraNo ratings yet
- Specimen QP - Unit 2 WJEC Physics A-LevelDocument13 pagesSpecimen QP - Unit 2 WJEC Physics A-LevelSheikh Ridwan HuqNo ratings yet
- Q4 ExamDocument7 pagesQ4 ExamMARILYN ANTONIO ONGKIKONo ratings yet
- BookPgs ProbDocument5 pagesBookPgs Probmsenesi3100% (2)
- TensorDocument44 pagesTensorbilal5202050No ratings yet
- Fers U Britanniques À Ailes ParallèlesDocument2 pagesFers U Britanniques À Ailes ParallèlesNazar Abdul KareemNo ratings yet
- Loads On Pot - Ptfe Bearing - 3x17m SpanDocument12 pagesLoads On Pot - Ptfe Bearing - 3x17m SpanMalayKumarDebNo ratings yet
- Design of Machine Elements: Muhammad Ilyas, PHDDocument60 pagesDesign of Machine Elements: Muhammad Ilyas, PHDumer JuttNo ratings yet
- Arche2 Module 1Document19 pagesArche2 Module 1Justine MonteroNo ratings yet
- Use of Gas Tables Permitted, Assume Suitable Value For Missing DataDocument2 pagesUse of Gas Tables Permitted, Assume Suitable Value For Missing DataVenkitaraj K PNo ratings yet
- Class 9 Sci Topic 1 - Laws of Motion - Notes - Awatade ClassesDocument7 pagesClass 9 Sci Topic 1 - Laws of Motion - Notes - Awatade ClassesRamkrishnahari RaskarNo ratings yet
- MCQ It 1 Oct 2020Document8 pagesMCQ It 1 Oct 2020Narayan ManeNo ratings yet