You might also like
- Computational Frameworks: Systems, Models and ApplicationsFrom EverandComputational Frameworks: Systems, Models and ApplicationsNo ratings yet
- A Unified Framework For Symbiosis of EvolutionaryDocument17 pagesA Unified Framework For Symbiosis of Evolutionaryai.nurhayati2020No ratings yet
- Design for the Unexpected: From Holonic Manufacturing Systems towards a Humane Mechatronics SocietyFrom EverandDesign for the Unexpected: From Holonic Manufacturing Systems towards a Humane Mechatronics SocietyNo ratings yet
- About Digital Organisms YilmazDocument6 pagesAbout Digital Organisms YilmazNONAME69No ratings yet
- Extended Finite Element Method: Tsinghua University Press Computational Mechanics SeriesFrom EverandExtended Finite Element Method: Tsinghua University Press Computational Mechanics SeriesNo ratings yet
- Research ProposalDocument8 pagesResearch ProposalJavaria Chiragh100% (1)
- Btab 649Document8 pagesBtab 649Yann FleatwoodNo ratings yet
- Huizinga 2018 CanalizationDocument25 pagesHuizinga 2018 Canalizationblrrrgh333No ratings yet
- Following The Organism To Map Synthetic GenomicsDocument4 pagesFollowing The Organism To Map Synthetic GenomicsGRAÇAS PERFUMARIANo ratings yet
- Conceptual Design in Structural EngineeringDocument8 pagesConceptual Design in Structural EngineeringNaveen SelvaraajuNo ratings yet
- Adami C Digital Genetics Unravelling The Genetic BDocument11 pagesAdami C Digital Genetics Unravelling The Genetic BPedro PazNo ratings yet
- Sciencedirect: Finite Element Analysis and Validation of Cellular StructuresDocument6 pagesSciencedirect: Finite Element Analysis and Validation of Cellular Structuresirfan nuryantaNo ratings yet
- li2020Document12 pagesli2020otavio.soaresNo ratings yet
- Modelling Biological SystemsDocument7 pagesModelling Biological Systemswatson191No ratings yet
- Jamt PDFDocument29 pagesJamt PDFYousif HagopainNo ratings yet
- Artificial Ecosystems For Creative Discovery: Jon MccormackDocument7 pagesArtificial Ecosystems For Creative Discovery: Jon MccormackAlice EldridgeNo ratings yet
- Machine Learning Components in Deterministic ModelDocument4 pagesMachine Learning Components in Deterministic Modelferdi66No ratings yet
- Hyper-Morphology: Experimentations With Bio-Inspired Design Processes For Adaptive Spatial Re-UseDocument10 pagesHyper-Morphology: Experimentations With Bio-Inspired Design Processes For Adaptive Spatial Re-Use黃智雅No ratings yet
- Entropy 24 00665Document25 pagesEntropy 24 00665walter stiersNo ratings yet
- A Hybrid Approach To Implement The Digital Twin Concept Into A Damage Evolution Prediction For Composite StructuresDocument141 pagesA Hybrid Approach To Implement The Digital Twin Concept Into A Damage Evolution Prediction For Composite Structures呆猫DemooNo ratings yet
- Building Blocks, Cohort Genetic Algorithms, and Hyperplane-De Ned FunctionsDocument19 pagesBuilding Blocks, Cohort Genetic Algorithms, and Hyperplane-De Ned FunctionsTarun KumarNo ratings yet
- Cell Formation, Cell Layout and Intracellular Machine Sequence in Cellular Manufacturing SystemsDocument13 pagesCell Formation, Cell Layout and Intracellular Machine Sequence in Cellular Manufacturing SystemsLove GolaNo ratings yet
- Simulating Microbial Community Patterns Using BiocellionDocument22 pagesSimulating Microbial Community Patterns Using BiocellionBeth mAcdonaldNo ratings yet
- Comparing Ontology Authoring Workflows With Prot G in T 2019 Journal of WeDocument11 pagesComparing Ontology Authoring Workflows With Prot G in T 2019 Journal of WegokhancantasNo ratings yet
- Structural Health Monitoring of Offshore Structures: January 2001Document22 pagesStructural Health Monitoring of Offshore Structures: January 2001ANDI AGUNG SNo ratings yet
- Evolving Structures in Complex SystemsDocument8 pagesEvolving Structures in Complex SystemsRodrigo Muñoz OjedaNo ratings yet
- Digital Morphogenesis in Architectural DDocument17 pagesDigital Morphogenesis in Architectural DGUANCI ZHUNo ratings yet
- Arc Moraes 20030611Document290 pagesArc Moraes 20030611Andreea MarinNo ratings yet
- Adaptation in Natural and Artificial SystemsDocument245 pagesAdaptation in Natural and Artificial Systemsel_ruso__83100% (1)
- Cuckoo Optimization Algorithm: Applied Soft ComputingDocument11 pagesCuckoo Optimization Algorithm: Applied Soft ComputingcarloslycanXNo ratings yet
- Dmu ThesisDocument4 pagesDmu ThesisJessica Henderson100% (1)
- On Interpretability of Artificial Neural Networks A SurveyDocument20 pagesOn Interpretability of Artificial Neural Networks A SurveyERICK MANUEL RUBIONo ratings yet
- Katholieke Universiteit Leuven: Sign in To My EbscohostDocument9 pagesKatholieke Universiteit Leuven: Sign in To My EbscohostingdasNo ratings yet
- RolfSteilGienger2011 ICDL OnlineGoalBabblingDocument9 pagesRolfSteilGienger2011 ICDL OnlineGoalBabblingArsh UppalNo ratings yet
- Comprehensive ModelingDocument4 pagesComprehensive ModelingBababa EkeNo ratings yet
- Biological Robots - Perspectives On An Emerging Interdisciplinary FieldDocument21 pagesBiological Robots - Perspectives On An Emerging Interdisciplinary FieldLuca MaciNo ratings yet
- Using Morphogenetic Models to Develop Spatial StructuresDocument6 pagesUsing Morphogenetic Models to Develop Spatial Structuresfrenape591177No ratings yet
- Karr A Whole Cell Computational Model 2012Document25 pagesKarr A Whole Cell Computational Model 2012AndaNo ratings yet
- Performative Exploration of Generative Systems_vBuelowDocument17 pagesPerformative Exploration of Generative Systems_vBuelowErrolHTNo ratings yet
- Evolving A Neurocontroller Through A Process of EmbryogenyDocument10 pagesEvolving A Neurocontroller Through A Process of EmbryogenyIon Mikel Onandia MartinezNo ratings yet
- Bachelor Thesis UlmDocument4 pagesBachelor Thesis Ulmtiffanymillerlittlerock100% (2)
- Proof: Materials Today: ProceedingsDocument3 pagesProof: Materials Today: ProceedingsabhinavrautNo ratings yet
- The Anatomy of A Human Body A Model To Design SmarDocument8 pagesThe Anatomy of A Human Body A Model To Design SmarBazingaNo ratings yet
- The Evolved Radio and Its Implications For Modelling The Evolution of Novel SensorsDocument6 pagesThe Evolved Radio and Its Implications For Modelling The Evolution of Novel SensorsYaakov PhotosNo ratings yet
- A Review of Validation Approaches and Modelling ChallengesDocument12 pagesA Review of Validation Approaches and Modelling ChallengesMoustafa AnwarNo ratings yet
- Thesis 2.1 Header ImageDocument7 pagesThesis 2.1 Header Imageafknfbdpv100% (2)
- Giselbrecht 2004Document8 pagesGiselbrecht 2004ducNo ratings yet
- Lander 2011 - Cell - Pattern Growth and ControlDocument15 pagesLander 2011 - Cell - Pattern Growth and ControlPilar AufrastoNo ratings yet
- Designing Neural Networks Through Neuroevolution: Review ArticleDocument12 pagesDesigning Neural Networks Through Neuroevolution: Review ArticlevukasinkgNo ratings yet
- Ins v1 PDFDocument29 pagesIns v1 PDFTeodora StevanovicNo ratings yet
- Bio-Inspired Back Support System For Backpacks: Elena AngeleskaDocument8 pagesBio-Inspired Back Support System For Backpacks: Elena AngeleskaDjedili AmelNo ratings yet
- INCOM VareillesDocument7 pagesINCOM VareillesAnsh PalNo ratings yet
- 1 s2.0 S187802961630055X MainDocument12 pages1 s2.0 S187802961630055X MainInas AbdelsabourNo ratings yet
- Advanced Materials - 2021 - Bertassoni - Bioprinting of Complex Multicellular Organs With Advanced Functionality RecentDocument21 pagesAdvanced Materials - 2021 - Bertassoni - Bioprinting of Complex Multicellular Organs With Advanced Functionality RecentfnkldhagfNo ratings yet
- Gox 10 E4523Document9 pagesGox 10 E4523David SidhomNo ratings yet
- Biomaterial Scaffold Fabrication Techniques For PoDocument20 pagesBiomaterial Scaffold Fabrication Techniques For PoAnuj ShandilyaNo ratings yet
- Evolutionary Computation and Strucutral Design-State of The Art-CSDocument36 pagesEvolutionary Computation and Strucutral Design-State of The Art-CSkostas formulagrNo ratings yet
- Roudavski Towards Morphogenesis in Architecture 09Document30 pagesRoudavski Towards Morphogenesis in Architecture 09Jack Danai SurasaNo ratings yet
- Kinetics and Thermodynamics of Protein FoldingDocument21 pagesKinetics and Thermodynamics of Protein FoldingEduardo OtalvaroNo ratings yet
- The Future of Biomedical Engineering: SciencedirectDocument3 pagesThe Future of Biomedical Engineering: Sciencedirectayush guptaNo ratings yet
- Structural Theory: Introduction To Structural Analysis: Prepared By: Dr. Ramela B. RamirezDocument7 pagesStructural Theory: Introduction To Structural Analysis: Prepared By: Dr. Ramela B. RamirezCraeven AranillaNo ratings yet
- Globalization and Environmental IssuesDocument18 pagesGlobalization and Environmental IssuesCraeven AranillaNo ratings yet
- Numerical Integration TechniquesDocument22 pagesNumerical Integration TechniquesCraeven AranillaNo ratings yet
- Stability Analysisof Nonlocal Elastic Columnswith Initial ImperfectionDocument12 pagesStability Analysisof Nonlocal Elastic Columnswith Initial ImperfectionCraeven AranillaNo ratings yet
- Philippines Development Finance Assessment - Policies, Institutional Arrangments and FlowsDocument100 pagesPhilippines Development Finance Assessment - Policies, Institutional Arrangments and FlowsCraeven AranillaNo ratings yet
- Stability Analysisof Nonlocal Elastic Columnswith Initial ImperfectionDocument12 pagesStability Analysisof Nonlocal Elastic Columnswith Initial ImperfectionCraeven AranillaNo ratings yet
- Introduction To Transportation Engineering Part 1 PrelimDocument33 pagesIntroduction To Transportation Engineering Part 1 PrelimCraeven AranillaNo ratings yet
- International Financial InstitutionsDocument13 pagesInternational Financial InstitutionsCraeven AranillaNo ratings yet
- Stability Analysisof Nonlocal Elastic Columnswith Initial ImperfectionDocument12 pagesStability Analysisof Nonlocal Elastic Columnswith Initial ImperfectionCraeven AranillaNo ratings yet
- Globalization and Environmental IssuesDocument18 pagesGlobalization and Environmental IssuesCraeven AranillaNo ratings yet
- Numerical Integration TechniquesDocument22 pagesNumerical Integration TechniquesCraeven AranillaNo ratings yet
- Globalization and Environmental IssuesDocument18 pagesGlobalization and Environmental IssuesCraeven AranillaNo ratings yet
- International Financial InstitutionsDocument13 pagesInternational Financial InstitutionsCraeven AranillaNo ratings yet
- Stability Analysisof Nonlocal Elastic Columnswith Initial ImperfectionDocument12 pagesStability Analysisof Nonlocal Elastic Columnswith Initial ImperfectionCraeven AranillaNo ratings yet
- Philippines Development Finance Assessment - Policies, Institutional Arrangments and FlowsDocument100 pagesPhilippines Development Finance Assessment - Policies, Institutional Arrangments and FlowsCraeven AranillaNo ratings yet
- Numerical Integration TechniquesDocument22 pagesNumerical Integration TechniquesCraeven AranillaNo ratings yet
- Stability Analysisof Nonlocal Elastic Columnswith Initial ImperfectionDocument12 pagesStability Analysisof Nonlocal Elastic Columnswith Initial ImperfectionCraeven AranillaNo ratings yet
- International Financial InstitutionsDocument13 pagesInternational Financial InstitutionsCraeven AranillaNo ratings yet
- Globalization and Environmental IssuesDocument18 pagesGlobalization and Environmental IssuesCraeven AranillaNo ratings yet
- International Financial InstitutionsDocument13 pagesInternational Financial InstitutionsCraeven AranillaNo ratings yet
- Philippines Development Finance Assessment - Policies, Institutional Arrangments and FlowsDocument100 pagesPhilippines Development Finance Assessment - Policies, Institutional Arrangments and FlowsCraeven AranillaNo ratings yet
- Globalization and Environmental IssuesDocument18 pagesGlobalization and Environmental IssuesCraeven AranillaNo ratings yet
- Numerical Integration TechniquesDocument22 pagesNumerical Integration TechniquesCraeven AranillaNo ratings yet
- International Financial InstitutionsDocument13 pagesInternational Financial InstitutionsCraeven AranillaNo ratings yet
- Philippines Development Finance Assessment - Policies, Institutional Arrangments and FlowsDocument100 pagesPhilippines Development Finance Assessment - Policies, Institutional Arrangments and FlowsCraeven AranillaNo ratings yet
- Stability Analysisof Nonlocal Elastic Columnswith Initial ImperfectionDocument12 pagesStability Analysisof Nonlocal Elastic Columnswith Initial ImperfectionCraeven AranillaNo ratings yet
- Philippines Development Finance Assessment - Policies, Institutional Arrangments and FlowsDocument100 pagesPhilippines Development Finance Assessment - Policies, Institutional Arrangments and FlowsCraeven AranillaNo ratings yet
- Numerical Integration TechniquesDocument22 pagesNumerical Integration TechniquesCraeven AranillaNo ratings yet
- Nguyen Et Al. - 2015 - Screening The Optimal Ratio of Symbiosis Between Isolated Yeast and Acetic Acid Bacteria Strain From Traditional-AnnotatedDocument25 pagesNguyen Et Al. - 2015 - Screening The Optimal Ratio of Symbiosis Between Isolated Yeast and Acetic Acid Bacteria Strain From Traditional-AnnotatedKim NgânNo ratings yet
- BROCHURE ODE Bassa - Valv para Maq CaféDocument7 pagesBROCHURE ODE Bassa - Valv para Maq Caféjf2003No ratings yet
- Fostering Innovation Through Experiential LearningDocument14 pagesFostering Innovation Through Experiential LearningAndrew TranNo ratings yet
- Ambiguity in Legal Translation: Salah Bouregbi Badji Mokhtar University Annaba - Algeria - Salihbourg@Document14 pagesAmbiguity in Legal Translation: Salah Bouregbi Badji Mokhtar University Annaba - Algeria - Salihbourg@MerHamNo ratings yet
- Theoretical Foundation in Nursing: LESSON 8Document4 pagesTheoretical Foundation in Nursing: LESSON 8Gabriel SorianoNo ratings yet
- DLL Els Quarter 1 Week 5Document4 pagesDLL Els Quarter 1 Week 5alyssa.ballonNo ratings yet
- Casey Cannon: EducationDocument1 pageCasey Cannon: Educationapi-355305449No ratings yet
- SPE 63041 Design and Installation of Sand Separation and Handling SystemDocument10 pagesSPE 63041 Design and Installation of Sand Separation and Handling Systemalexalek2000No ratings yet
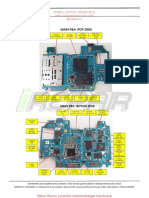
- SM-A102N Manual de Servicio Anibal Garcia IrepaiDocument37 pagesSM-A102N Manual de Servicio Anibal Garcia IrepaiJoaquin Koki Ventura100% (1)
- Class Test Dec 10Document6 pagesClass Test Dec 10trudes100No ratings yet
- The Future of Luxury Fashion ReportDocument70 pagesThe Future of Luxury Fashion Reportsalma andjaniNo ratings yet
- Yearly Lesson Plan LK Form 5Document26 pagesYearly Lesson Plan LK Form 5Nur'ain Abd RahimNo ratings yet
- DE Monthly Assessment - IDocument5 pagesDE Monthly Assessment - IJay KakadiyaNo ratings yet
- Articol S.brînza, V.stati Pag.96Document154 pagesArticol S.brînza, V.stati Pag.96crina1996No ratings yet
- Ai, Iot, Big Data & BlockchainDocument19 pagesAi, Iot, Big Data & BlockchainClick GroupNo ratings yet
- Challenges of Deep Excavation for KVMRT StationsDocument85 pagesChallenges of Deep Excavation for KVMRT StationsAlwin AntonyNo ratings yet
- Crane Company Within SingaporeDocument4 pagesCrane Company Within SingaporeRash AcidNo ratings yet
- UNIT-I Problems (PSE EEE)Document6 pagesUNIT-I Problems (PSE EEE)Aditya JhaNo ratings yet
- Uncertainty in Measurements - Lab ReportDocument4 pagesUncertainty in Measurements - Lab ReportStaniaNo ratings yet
- Srikanth Aadhar Iti CollegeDocument1 pageSrikanth Aadhar Iti CollegeSlns AcptNo ratings yet
- Perpus Pusat Bab 1 Dan 2Document62 pagesPerpus Pusat Bab 1 Dan 2imam rafifNo ratings yet
- Creating Quizzes in MS PowerPointDocument6 pagesCreating Quizzes in MS PowerPointZiel Cabungcal CardañoNo ratings yet
- 2GIG ZWave CT30e Thermostat Installation GuideDocument19 pages2GIG ZWave CT30e Thermostat Installation Guideyamimaker2002No ratings yet
- P90X2 Les Mills PUMP HybridDocument7 pagesP90X2 Les Mills PUMP HybridRamonBeltranNo ratings yet
- Lecture Notes (Chapter 2.3 Triple Integral)Document5 pagesLecture Notes (Chapter 2.3 Triple Integral)shinee_jayasila2080100% (1)
- Solid State Physics by Kettel Chapter 4Document17 pagesSolid State Physics by Kettel Chapter 4Taseer BalochNo ratings yet
- Kollmorgen S300 Servo Drive ManualDocument134 pagesKollmorgen S300 Servo Drive ManualCarlos SalazarNo ratings yet
- Fault Code 498 Engine Oil Level Sensor Circuit - Voltage Above Normal, or Shorted To High SourceDocument13 pagesFault Code 498 Engine Oil Level Sensor Circuit - Voltage Above Normal, or Shorted To High SourceAhmedmah100% (1)
- Assignment 5: Engineering Utilities IiDocument4 pagesAssignment 5: Engineering Utilities IiRex SabersonNo ratings yet
- No+bake+ing +vol+iiDocument132 pagesNo+bake+ing +vol+iiEugeny TikhomirovNo ratings yet
- Marine Structural Design CalculationsFrom EverandMarine Structural Design CalculationsRating: 4.5 out of 5 stars4.5/5 (13)
- Flow-Induced Vibrations: Classifications and Lessons from Practical ExperiencesFrom EverandFlow-Induced Vibrations: Classifications and Lessons from Practical ExperiencesTomomichi NakamuraRating: 4.5 out of 5 stars4.5/5 (4)
- Green Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsFrom EverandGreen Roofs, Facades, and Vegetative Systems: Safety Aspects in the StandardsNo ratings yet
- Pocket Guide to Flanges, Fittings, and Piping DataFrom EverandPocket Guide to Flanges, Fittings, and Piping DataRating: 3.5 out of 5 stars3.5/5 (22)
- Advanced Modelling Techniques in Structural DesignFrom EverandAdvanced Modelling Techniques in Structural DesignRating: 5 out of 5 stars5/5 (3)
- Structural Steel Design to Eurocode 3 and AISC SpecificationsFrom EverandStructural Steel Design to Eurocode 3 and AISC SpecificationsNo ratings yet
- Structural Cross Sections: Analysis and DesignFrom EverandStructural Cross Sections: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (19)
- To Engineer Is Human: The Role of Failure in Successful DesignFrom EverandTo Engineer Is Human: The Role of Failure in Successful DesignRating: 4 out of 5 stars4/5 (137)
- Transmission Pipeline Calculations and Simulations ManualFrom EverandTransmission Pipeline Calculations and Simulations ManualRating: 4.5 out of 5 stars4.5/5 (10)
- Pile Design and Construction Rules of ThumbFrom EverandPile Design and Construction Rules of ThumbRating: 4.5 out of 5 stars4.5/5 (15)
- Advanced Design Examples of Seismic Retrofit of StructuresFrom EverandAdvanced Design Examples of Seismic Retrofit of StructuresRating: 1 out of 5 stars1/5 (1)
- Bridge Engineering: Classifications, Design Loading, and Analysis MethodsFrom EverandBridge Engineering: Classifications, Design Loading, and Analysis MethodsRating: 4 out of 5 stars4/5 (16)
- Climate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingFrom EverandClimate Adaptation Engineering: Risks and Economics for Infrastructure Decision-MakingNo ratings yet
- Design and Construction of Soil Anchor PlatesFrom EverandDesign and Construction of Soil Anchor PlatesRating: 5 out of 5 stars5/5 (1)
- Offshore Pipelines: Design, Installation, and MaintenanceFrom EverandOffshore Pipelines: Design, Installation, and MaintenanceRating: 4.5 out of 5 stars4.5/5 (2)
- Piezocone and Cone Penetration Test (CPTu and CPT) Applications in Foundation EngineeringFrom EverandPiezocone and Cone Penetration Test (CPTu and CPT) Applications in Foundation EngineeringNo ratings yet
- Building Support Structures, 2nd Ed., Analysis and Design with SAP2000 SoftwareFrom EverandBuilding Support Structures, 2nd Ed., Analysis and Design with SAP2000 SoftwareRating: 4.5 out of 5 stars4.5/5 (15)