You might also like
- Z-Transforms Solved ProblemsDocument5 pagesZ-Transforms Solved ProblemsHarsha100% (1)
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Arihant 41 Years Maths (Crackjee - Xyz) PDFDocument625 pagesArihant 41 Years Maths (Crackjee - Xyz) PDFShushma100% (2)
- FMEA - Student ManualDocument115 pagesFMEA - Student ManualRajkumar35No ratings yet
- Xam Idea Mathematics - Class 12 Term 1 and 2 Question BankDocument563 pagesXam Idea Mathematics - Class 12 Term 1 and 2 Question BankAkshya PatelNo ratings yet
- Beam BucklingDocument45 pagesBeam BucklingSaleha QuadsiaNo ratings yet
- Conic Sections PDFDocument95 pagesConic Sections PDFManoj Baishya100% (1)
- ISC 12 Mathematics SyllabusDocument8 pagesISC 12 Mathematics Syllabussupercell.mail.helpshift.sharingNo ratings yet
- ISC Class 12 Mathematics Syllabus 2023 24Document10 pagesISC Class 12 Mathematics Syllabus 2023 24Gowtham JayavarapuNo ratings yet
- ISC MathematicsDocument9 pagesISC MathematicsPRACHI GUPTANo ratings yet
- ISC Class 12 Mathematics SyllabusDocument9 pagesISC Class 12 Mathematics Syllabusfatima.aasia25No ratings yet
- Isc Class12 Maths SyllabusDocument9 pagesIsc Class12 Maths Syllabusviveksahu47156No ratings yet
- ISC MathematicsDocument9 pagesISC MathematicsAyush SrivastavaNo ratings yet
- 17 ISC-MathematicsDocument7 pages17 ISC-MathematicsAlone AlkalineNo ratings yet
- ISC Mathematics XIIDocument10 pagesISC Mathematics XIIUnkwonNo ratings yet
- 2021ISCReducedSyllabusXII MATHEMATICS PDFDocument8 pages2021ISCReducedSyllabusXII MATHEMATICS PDFAfroz Alam Ki VinesNo ratings yet
- ISC Mathematics Class XII (Amended) - 2021Document9 pagesISC Mathematics Class XII (Amended) - 2021aditricNo ratings yet
- Mathematics (860) : Class XiiDocument7 pagesMathematics (860) : Class XiiMariamNo ratings yet
- ISC MathematicsDocument20 pagesISC MathematicsprinceNo ratings yet
- ISC MathematicsDocument20 pagesISC MathematicsRajit AnandNo ratings yet
- ISC Class 11 Mathematics Syllabus 2023 24Document10 pagesISC Class 11 Mathematics Syllabus 2023 24hafsNo ratings yet
- Mathematics (860) : AimsDocument20 pagesMathematics (860) : AimsHiteshRawalNo ratings yet
- Mathematics (860) : Class XiDocument8 pagesMathematics (860) : Class XiYour Laptop GuideNo ratings yet
- ISC Mathematics XI RevisedDocument8 pagesISC Mathematics XI RevisedDev KhariNo ratings yet
- Mathematics-12Document8 pagesMathematics-12Sidhant MalhotraNo ratings yet
- Class 12 Revised Syllabus For 2023 Board Examination-1Document14 pagesClass 12 Revised Syllabus For 2023 Board Examination-1Arkin DixitNo ratings yet
- Class Xii Mathematics BookletDocument239 pagesClass Xii Mathematics BookletBasant KothariNo ratings yet
- Syllabus Comparison - XII MathsDocument4 pagesSyllabus Comparison - XII MathsSparsh SinghalNo ratings yet
- CUET QB Mathematics SyllabusDocument3 pagesCUET QB Mathematics SyllabusShreyas BansalNo ratings yet
- Class-Xii (2018-19) : One Paper Time: 3 Hrs. Max Marks. 100Document8 pagesClass-Xii (2018-19) : One Paper Time: 3 Hrs. Max Marks. 100RishabhNo ratings yet
- CUET Syllabus 2022 MathematicsDocument9 pagesCUET Syllabus 2022 MathematicsADITYA VERMANo ratings yet
- Class 12Document5 pagesClass 12Aryan GuptaNo ratings yet
- 11 SM 2017 Math Eng-1Document222 pages11 SM 2017 Math Eng-1nehabehlNo ratings yet
- Supporting MaterialDocument184 pagesSupporting MaterialAayush GuptaNo ratings yet
- Math FinalDocument11 pagesMath Finalabirholmes2000No ratings yet
- Mathematics XIDocument67 pagesMathematics XIDBXGAMINGNo ratings yet
- LESSON PLAN: BS-M101 (Mathematics-1A For CSE & IT)Document24 pagesLESSON PLAN: BS-M101 (Mathematics-1A For CSE & IT)Ireish Mae RutaNo ratings yet
- Question Paper Pu II Maths - IIpDocument47 pagesQuestion Paper Pu II Maths - IIpdnageshm4n244No ratings yet
- Maths 12 (2023-24) Final NEWDocument5 pagesMaths 12 (2023-24) Final NEWdhanoaraman39No ratings yet
- 5 6129609310025549618Document31 pages5 6129609310025549618priyanshuNo ratings yet
- Mathematics 11 2021-22 Term 1 SyllabusDocument4 pagesMathematics 11 2021-22 Term 1 SyllabusBetaBeast12No ratings yet
- A&r CBQ Pre-Course MaterilDocument129 pagesA&r CBQ Pre-Course MaterilJeyanthiNo ratings yet
- CBSE Q.B. XII Mathematics SyllabusDocument5 pagesCBSE Q.B. XII Mathematics Syllabusswatisinha743No ratings yet
- Study Material 12th Maths 2023-24Document79 pagesStudy Material 12th Maths 2023-24Gunish GuptaNo ratings yet
- 12th Syllabus Term1Document2 pages12th Syllabus Term1P I X Ξ LNo ratings yet
- CBSE Class 12 Maths Deleted Syllabus Portion For 2020 21Document2 pagesCBSE Class 12 Maths Deleted Syllabus Portion For 2020 21Mansi MeharaNo ratings yet
- 319 MathematicsDocument4 pages319 MathematicsmasterakmalonlineNo ratings yet
- Study Material Xii (Maths) 041 2023-24Document85 pagesStudy Material Xii (Maths) 041 2023-24AimbotNo ratings yet
- 2 Mathematics 1Document3 pages2 Mathematics 1pathir KroNo ratings yet
- S.No. ContentDocument196 pagesS.No. ContentKartikay RajNo ratings yet
- s479859 PDFDocument207 pagess479859 PDFHardik DonderiyaNo ratings yet
- Math - 11-Split Up SyllabusDocument3 pagesMath - 11-Split Up SyllabusAryan singhNo ratings yet
- 11 Math Eng 2024 25Document3 pages11 Math Eng 2024 25kiransharmmaa937No ratings yet
- Syllabus of Ktu IC s3Document3 pagesSyllabus of Ktu IC s3Shanu ApNo ratings yet
- MatricesDocument20 pagesMatricesanaymohi2421No ratings yet
- Punjab Board Class 11 Maths SyllabusDocument4 pagesPunjab Board Class 11 Maths SyllabusRavi KheraNo ratings yet
- Maths BookletDocument56 pagesMaths BookletRachita SinghNo ratings yet
- West Bengal Board Class 11 Mathematics SyllabusDocument4 pagesWest Bengal Board Class 11 Mathematics SyllabusRMNo ratings yet
- IntroductoryCourse TrigonometryDocument18 pagesIntroductoryCourse TrigonometryAzhar QadriNo ratings yet
- Elementary Analysis: The Commonwealth and International Library: Mathematics Division, Volume 1From EverandElementary Analysis: The Commonwealth and International Library: Mathematics Division, Volume 1No ratings yet
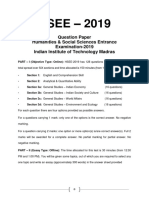
- Hsee - 2019: Question Paper Humanities & Social Sciences Entrance Examination-2019 Indian Institute of Technology MadrasDocument34 pagesHsee - 2019: Question Paper Humanities & Social Sciences Entrance Examination-2019 Indian Institute of Technology MadrasUTKARSH TIWARINo ratings yet
- HSEE 2020 QP y1EpqKUDocument23 pagesHSEE 2020 QP y1EpqKUUTKARSH TIWARINo ratings yet
- PHYSICS (861) : Paper I: Theory - Paper II: Practical - 3 HoursDocument12 pagesPHYSICS (861) : Paper I: Theory - Paper II: Practical - 3 HoursUTKARSH TIWARINo ratings yet
- CHEMISTRY (862) : Paper I: Theory - Paper II: Practical: 3 Hours ... 15 MarksDocument12 pagesCHEMISTRY (862) : Paper I: Theory - Paper II: Practical: 3 Hours ... 15 MarksUTKARSH TIWARINo ratings yet
- Physical Education (875) : Class XiiDocument17 pagesPhysical Education (875) : Class XiiUTKARSH TIWARINo ratings yet
- Polynomials Level 2Document15 pagesPolynomials Level 2greycouncilNo ratings yet
- Algebra1 (2) (2) - RepairedDocument36 pagesAlgebra1 (2) (2) - RepairedKean BognotNo ratings yet
- NPTEL, Basic Linear Algebra, January 2019 Additional QuestionsDocument6 pagesNPTEL, Basic Linear Algebra, January 2019 Additional QuestionsRupendra yadavNo ratings yet
- C in (A, B) Such That FB Fa F C Ba: AP Calc Notes: DA2 - 2 Mean Value Theorem Mean Value Theorem (MVT)Document3 pagesC in (A, B) Such That FB Fa F C Ba: AP Calc Notes: DA2 - 2 Mean Value Theorem Mean Value Theorem (MVT)Alaka KondaNo ratings yet
- 12th TERM 1 Question PaperDocument3 pages12th TERM 1 Question PaperUnkown HumanNo ratings yet
- Matrices and Basic Calculus For Non Majors-MT161Document19 pagesMatrices and Basic Calculus For Non Majors-MT161Hamisi MzariNo ratings yet
- MIT2 086S13 TextbookDocument446 pagesMIT2 086S13 TextbookjayakumarNo ratings yet
- Villa College: Centre For Foundation StudiesDocument2 pagesVilla College: Centre For Foundation StudiesMular Abdul ShukoorNo ratings yet
- Lecture 1.b - Solutions of Higher Order ODE - Part 2-2ADocument37 pagesLecture 1.b - Solutions of Higher Order ODE - Part 2-2AJohn Carlo CortezNo ratings yet
- Reed Muller Codes Sebastian RaaphorstDocument20 pagesReed Muller Codes Sebastian RaaphorstsiyagNo ratings yet
- Worksheet Day 2Document2 pagesWorksheet Day 2jagannivasNo ratings yet
- Obj Selected QsDocument31 pagesObj Selected Qsjyotisahni13No ratings yet
- Numerical AnalysisDocument27 pagesNumerical AnalysisPKJ4LOV100% (1)
- Summative Week 2 Quarter 1Document4 pagesSummative Week 2 Quarter 1Joseph SimeraNo ratings yet
- Beddani Sums of Prime Element Orders in Finite GroupsDocument6 pagesBeddani Sums of Prime Element Orders in Finite Groupsmaria-ionela CrasneanNo ratings yet
- Simultaneous Linear Equations BBA-I Sem 2022 BatchDocument34 pagesSimultaneous Linear Equations BBA-I Sem 2022 BatchGaurav AgrawalNo ratings yet
- EdCET 2014 Mathematics Question Paper With AnswersDocument30 pagesEdCET 2014 Mathematics Question Paper With AnswerspavaniNo ratings yet
- HEI Workshop BahirDar Report MathDocument130 pagesHEI Workshop BahirDar Report MathGebrehiwotNegaa100% (1)
- Equation of Pair of Straight Lines: B A S I C L e V e LDocument11 pagesEquation of Pair of Straight Lines: B A S I C L e V e LAnkit Kumar ThakurNo ratings yet
- Phy 413 Lecture Three NotesDocument3 pagesPhy 413 Lecture Three Notesprudence.chepngenoNo ratings yet
- Linear Time Varying SystemsDocument653 pagesLinear Time Varying Systemspablo100% (1)
- Vectors Problems PDFDocument1 pageVectors Problems PDFIqbal A MirNo ratings yet
- 17 Taylor SeriesDocument14 pages17 Taylor SeriesSamica JoshuaNo ratings yet
- BS Zoology CurriculumDocument74 pagesBS Zoology CurriculumMaaz alamNo ratings yet
- 4047 - Y20 - Sy A MathDocument12 pages4047 - Y20 - Sy A Mathkll93No ratings yet
- 2nd Sem Discrete Structures (CSC160)Document6 pages2nd Sem Discrete Structures (CSC160)Hridaya KandelNo ratings yet