You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Dede - (2010) - Comparing Frameworks For 21st Century Skills PDFDocument16 pagesDede - (2010) - Comparing Frameworks For 21st Century Skills PDFNaing Lynn HtunNo ratings yet
- A-Health Advance - Application Form With InstructionsDocument14 pagesA-Health Advance - Application Form With InstructionsExsan OthmanNo ratings yet
- AVR On Load Tap ChangerDocument39 pagesAVR On Load Tap ChangerInsan Aziz100% (1)
- Fulltext PDFDocument454 pagesFulltext PDFVirmantas JuoceviciusNo ratings yet
- Plastics Library 2016 enDocument32 pagesPlastics Library 2016 enjoantanamal tanamaNo ratings yet
- BIO SCI OsmosisDocument10 pagesBIO SCI OsmosisJoy FernandezNo ratings yet
- Ponce vs. Court of AppealsDocument7 pagesPonce vs. Court of AppealsMp CasNo ratings yet
- Microtech Testing & Research Laboratory: Condition of Sample, When Received: SatisfactoryDocument1 pageMicrotech Testing & Research Laboratory: Condition of Sample, When Received: SatisfactoryKumar AbhishekNo ratings yet
- Betty Blue Eyes Kotta PDFDocument306 pagesBetty Blue Eyes Kotta PDFCsóka Anita83% (6)
- Engineering Data: Wireway SelectionDocument3 pagesEngineering Data: Wireway SelectionFidel Castrzzo BaeNo ratings yet
- Ecological Building: Term Project For ME 599Document32 pagesEcological Building: Term Project For ME 599Junaid AnwarNo ratings yet
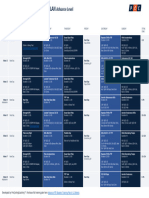
- FTP Booster Training Plan OverviewDocument1 pageFTP Booster Training Plan Overviewwiligton oswaldo uribe rodriguezNo ratings yet
- Hex 33 X 80Document1 pageHex 33 X 80PurchaseNo ratings yet
- Ism Practical File NothingDocument84 pagesIsm Practical File NothingADITYA GUPTANo ratings yet
- Direct MessagesDocument338 pagesDirect Messages1Ksubs with a cod trickshotNo ratings yet
- 007: The Stealth Affair ManualDocument11 pages007: The Stealth Affair Manualcodigay769No ratings yet
- AWP 4A Syllabus Fall 2021 (Misinformation)Document11 pagesAWP 4A Syllabus Fall 2021 (Misinformation)camNo ratings yet
- MSDS Potassium DichromateDocument8 pagesMSDS Potassium DichromateAyu Lakshemini OkaNo ratings yet
- Analog Digital Thermopile Application Note PDFDocument18 pagesAnalog Digital Thermopile Application Note PDFGopal HegdeNo ratings yet
- Modal Verbs EjercicioDocument2 pagesModal Verbs EjercicioAngel sosaNo ratings yet
- Assessment of Locomotive and Multi-Unit Fatigue Strength Considering The Results of Certifi Cation Tests in Ukraine and EU CountriesDocument8 pagesAssessment of Locomotive and Multi-Unit Fatigue Strength Considering The Results of Certifi Cation Tests in Ukraine and EU CountriesLeonardo Antônio Pereira100% (1)
- Chemical Recycling of Textile PolymersDocument8 pagesChemical Recycling of Textile PolymersVaishali RaneNo ratings yet
- Form ConstructionDocument36 pagesForm ConstructionYhoga DheviantNo ratings yet
- Lesson 3 - Practical ResearchDocument17 pagesLesson 3 - Practical ResearchBenNo ratings yet
- APA 6th Edition - Citation Styles APA, MLA, Chicago, Turabian, IEEE - LibGuDocument2 pagesAPA 6th Edition - Citation Styles APA, MLA, Chicago, Turabian, IEEE - LibGuJan Louis SalazarNo ratings yet
- Level 2 Online BPDocument98 pagesLevel 2 Online BProbertduvallNo ratings yet
- V3 Tool Installation GuideDocument13 pagesV3 Tool Installation GuideLeonardo Floresta NascimentoNo ratings yet
- December 2022 Issue: More Transparency, P S An R T e R o M, y C en Ar P P, y PDocument24 pagesDecember 2022 Issue: More Transparency, P S An R T e R o M, y C en Ar P P, y Pwpp8284No ratings yet
- 3.3 (B) Mole N MassDocument20 pages3.3 (B) Mole N MassFidree AzizNo ratings yet
- Small Molecule Modulators of PCSK9 A Litera 2018 Bioorganic Medicinal CHDocument6 pagesSmall Molecule Modulators of PCSK9 A Litera 2018 Bioorganic Medicinal CHMikeNo ratings yet