You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
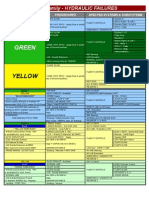
- A320 Hydraulic FailuresDocument2 pagesA320 Hydraulic FailuresMarcos Braga90% (42)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Crew Interface in Aircraft: Standard Specification ForDocument1 pageCrew Interface in Aircraft: Standard Specification ForJGarridoRubioNo ratings yet
- Hybrid Structure Solution For The A400M Wing Attachment FramesDocument38 pagesHybrid Structure Solution For The A400M Wing Attachment FramesszymusgNo ratings yet
- Description and Application of Dual Mass Dynamic Cone Penetrometer by Webster Et AlDocument52 pagesDescription and Application of Dual Mass Dynamic Cone Penetrometer by Webster Et AlIvan MasubaNo ratings yet
- Agk Full PDFDocument346 pagesAgk Full PDFSabik Rahim100% (1)
- Mil DTL 7788JDocument47 pagesMil DTL 7788JJGarridoRubioNo ratings yet
- JSSG-2010-5-Crew Systems Part 8Document5 pagesJSSG-2010-5-Crew Systems Part 8JGarridoRubioNo ratings yet
- Libro - Sae Arp4754Document115 pagesLibro - Sae Arp4754JGarridoRubioNo ratings yet
- MODAL VERBS IN THE PAST Subject + Modal Verb + HAVE + Past ParticipleDocument22 pagesMODAL VERBS IN THE PAST Subject + Modal Verb + HAVE + Past ParticipleJGarridoRubioNo ratings yet
- JSSG-2010-5-Crew Systems Part 9Document3 pagesJSSG-2010-5-Crew Systems Part 9JGarridoRubioNo ratings yet
- JSSG-2010-5-Crew Systems Part 4Document6 pagesJSSG-2010-5-Crew Systems Part 4JGarridoRubioNo ratings yet
- JSSG 2010 5 Crew Systems Part 5Document4 pagesJSSG 2010 5 Crew Systems Part 5JGarridoRubioNo ratings yet
- Botones MS25089Document5 pagesBotones MS25089JGarridoRubioNo ratings yet
- JSSG-2010-5-Crew Systems Part 3Document4 pagesJSSG-2010-5-Crew Systems Part 3JGarridoRubioNo ratings yet
- JSSG-2010-5-Crew Systems Part 2Document8 pagesJSSG-2010-5-Crew Systems Part 2JGarridoRubioNo ratings yet
- JSSG-2010-5-Crew Systems Part 1Document15 pagesJSSG-2010-5-Crew Systems Part 1JGarridoRubioNo ratings yet
- JSSG 2010 5 Crew SystemsDocument118 pagesJSSG 2010 5 Crew SystemsJGarridoRubioNo ratings yet
- MS35649HDocument3 pagesMS35649HJGarridoRubioNo ratings yet
- Nato Standard Amedp-8.1 Documentation Relative To Initial Medical Treatment and EvacuationDocument20 pagesNato Standard Amedp-8.1 Documentation Relative To Initial Medical Treatment and EvacuationJGarridoRubioNo ratings yet
- Paper Sobre Human Factors en La Cabina-11-12Document2 pagesPaper Sobre Human Factors en La Cabina-11-12JGarridoRubioNo ratings yet
- Paper Explicativo Del DEPDocument12 pagesPaper Explicativo Del DEPJGarridoRubioNo ratings yet
- A067 AnErgonomicsStudyofUniKLMSIPeroduaEco ChallengeRaceCarCockpitDocument7 pagesA067 AnErgonomicsStudyofUniKLMSIPeroduaEco ChallengeRaceCarCockpitJGarridoRubioNo ratings yet
- The Indication of The Selected Fuel Valve Position MustDocument1 pageThe Indication of The Selected Fuel Valve Position MustJGarridoRubioNo ratings yet
- Astm F31172Document1 pageAstm F31172JGarridoRubioNo ratings yet
- Ngineering Otes: Approximate Method of Deriving Loiter Time From RangeDocument3 pagesNgineering Otes: Approximate Method of Deriving Loiter Time From Rangekaique henrique minaNo ratings yet
- D ZX GopvDocument109 pagesD ZX GopvMiguel ChavezNo ratings yet
- BoeingDocument110 pagesBoeingandi suntoro100% (2)
- Airfix Club Magazine 2008.05 PDFDocument12 pagesAirfix Club Magazine 2008.05 PDFThussardNo ratings yet
- Aircraft Type Knowledge Warrior EditedDocument7 pagesAircraft Type Knowledge Warrior EditedTomiNo ratings yet
- Abnormal ProceduresDocument21 pagesAbnormal ProceduresMario SanclementeNo ratings yet
- LIRF Star 16-7-25 2015-09-17Document7 pagesLIRF Star 16-7-25 2015-09-17lanzeNo ratings yet
- L410NG PDFDocument12 pagesL410NG PDFtirmiziNo ratings yet
- History of HelicoptersDocument18 pagesHistory of HelicoptersMark PalisocNo ratings yet
- Performance Analysis of Boeing 777-200 E PDFDocument4 pagesPerformance Analysis of Boeing 777-200 E PDFMohamedAhmedShawkyNo ratings yet
- Latin American MRO Industry Trends & Market Forecast: Panama City, Panama February 14, 2018Document27 pagesLatin American MRO Industry Trends & Market Forecast: Panama City, Panama February 14, 2018Juan Manuel RoncoNo ratings yet
- Embraer Prodigy Flight Deck 300: Pilot's GuideDocument748 pagesEmbraer Prodigy Flight Deck 300: Pilot's GuideEric HenriqueNo ratings yet
- Flight ControlsDocument41 pagesFlight ControlsMichel Garandán PizzornoNo ratings yet
- Aviation 3Document3 pagesAviation 3Huzaifa IftikharNo ratings yet
- Fighter Aircraft Avionics Part IDocument132 pagesFighter Aircraft Avionics Part Iis icin75% (4)
- Holding Patterns 1Document5 pagesHolding Patterns 1sohaib arifNo ratings yet
- Hindustan Aeronautics LimitedDocument7 pagesHindustan Aeronautics LimitedSai Prathap ReddyNo ratings yet
- MOAI - SCR DronesDocument1 pageMOAI - SCR DronesCtayNo ratings yet
- Arado Ar 234Document12 pagesArado Ar 234moipedrasNo ratings yet
- Instrument Flight Rules RNAV Approaches in Complex Airspace: Wu-Tm-Ap-Tm-WuDocument24 pagesInstrument Flight Rules RNAV Approaches in Complex Airspace: Wu-Tm-Ap-Tm-WuDeepti EshwarNo ratings yet
- Flight Crew Operating Manual: Reference: CTV A320 Fleet Fcom Issue Date: 24 Jan 17Document1 pageFlight Crew Operating Manual: Reference: CTV A320 Fleet Fcom Issue Date: 24 Jan 17pedatiNo ratings yet
- Safran Network and Presence in ChinaDocument9 pagesSafran Network and Presence in ChinaJohn KevinNo ratings yet
- ICAO Rescue Fire Fighting (RFF) Category Compliance at AirportsDocument2 pagesICAO Rescue Fire Fighting (RFF) Category Compliance at Airportsluka_estNo ratings yet
- Donley - NavairDocument37 pagesDonley - Navairkishan2016100% (1)
- Notam Decode 13pgDocument13 pagesNotam Decode 13pgWilliam XavierNo ratings yet
- Common Interview Questions (EGYCPS)Document2 pagesCommon Interview Questions (EGYCPS)Youssef BelalNo ratings yet