You might also like
- Behavior Intervention MenuDocument56 pagesBehavior Intervention Menuapi-479527084100% (4)
- Chapter 6 Strategy Analysis and Choice: Strategic Management: A Competitive Advantage Approach, 16e (David)Document27 pagesChapter 6 Strategy Analysis and Choice: Strategic Management: A Competitive Advantage Approach, 16e (David)Masum ZamanNo ratings yet
- Robotics in EducationDocument6 pagesRobotics in EducationEditor IJTSRDNo ratings yet
- Chemical & Biological Depopulation (By Water Floridation and Food Additives or Preservatives) PDFDocument178 pagesChemical & Biological Depopulation (By Water Floridation and Food Additives or Preservatives) PDFsogunmola100% (2)
- Rosewood Case AnalysisDocument5 pagesRosewood Case AnalysisJayant KushwahaNo ratings yet
- Operator's ManualDocument110 pagesOperator's ManualAdam0% (1)
- Passage Planning: Dr. Arwa HusseinDocument15 pagesPassage Planning: Dr. Arwa HusseinArwa Hussein100% (3)
- Pre-Paid Customer Churn Prediction Using SPSSDocument18 pagesPre-Paid Customer Churn Prediction Using SPSSabhi1098No ratings yet
- The Application of Artificial Intelligence in Mobile Learning PDFDocument4 pagesThe Application of Artificial Intelligence in Mobile Learning PDFAmine HamdouchiNo ratings yet
- 3 PDFDocument2 pages3 PDFTalha KhalidNo ratings yet
- Build-a-Bot Teaching Conversational AI Using A TraDocument8 pagesBuild-a-Bot Teaching Conversational AI Using A Trachaimae.bouafoudNo ratings yet
- Teaching Artificial Intelligence AI With AI For AIDocument4 pagesTeaching Artificial Intelligence AI With AI For AIsmeet kadamNo ratings yet
- Cooperative Thinking - Analyzing A New Framework For Software Engineering EducationDocument12 pagesCooperative Thinking - Analyzing A New Framework For Software Engineering EducationAmeera AishaNo ratings yet
- Exploring The Potential of Metaverse in Software Engineering EducationDocument4 pagesExploring The Potential of Metaverse in Software Engineering EducationS2MCA21 Preeti RaiNo ratings yet
- Computational Thinking and User Interfaces A Systematic ReviewDocument10 pagesComputational Thinking and User Interfaces A Systematic ReviewΚΩΝΣΤΑΝΤΙΝΟΣ ΖΑΧΑΡΗΣNo ratings yet
- The Extent of AI Applications in EFL Learning and TeachingDocument11 pagesThe Extent of AI Applications in EFL Learning and TeachingblumingelfNo ratings yet
- Ai Online Program BrochureDocument10 pagesAi Online Program BrochuredejireNo ratings yet
- 1 The Role of Mathematics and Modeling in A CompetenDocument9 pages1 The Role of Mathematics and Modeling in A CompetenNothing NameNo ratings yet
- Chapter 02 Elements of AIDocument5 pagesChapter 02 Elements of AIMubasher HussainNo ratings yet
- INTELEK An Interactive Learning Kiosk For Elementary PupilsDocument6 pagesINTELEK An Interactive Learning Kiosk For Elementary PupilsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Learning Markets An AI Collaboration Framework Based On Blockchain and Smart ContractsDocument14 pagesLearning Markets An AI Collaboration Framework Based On Blockchain and Smart ContractsFelipe Titonel AbreuNo ratings yet
- IITB ML AI BrochureDocument14 pagesIITB ML AI BrochuregvbahlNo ratings yet
- Preparing For Industry 4.0 - Collaborative Virtual Learning Environments in Engineering EducationDocument6 pagesPreparing For Industry 4.0 - Collaborative Virtual Learning Environments in Engineering EducationHasniza HarunNo ratings yet
- An Analysis of Mobile Learning Implementation in Shinas College of Technology (SHCT)Document4 pagesAn Analysis of Mobile Learning Implementation in Shinas College of Technology (SHCT)ijcnesNo ratings yet
- Towards Emotinally Aware AI Smart Classroom Current Issues and Directions For Engineering and EducationDocument22 pagesTowards Emotinally Aware AI Smart Classroom Current Issues and Directions For Engineering and EducationJuan José Delgado QuesadaNo ratings yet
- Teaching Soft Skills in Software Engineering (Artículo)Document9 pagesTeaching Soft Skills in Software Engineering (Artículo)Jorge Isaac OrtizNo ratings yet
- Dellermann 2019 HuAI PDFDocument10 pagesDellermann 2019 HuAI PDFJerimNo ratings yet
- A Feasible Study of A Deep Learning Model Supporting Human-Machine Collaborative Learning of Object-Oriented ProgrammingDocument15 pagesA Feasible Study of A Deep Learning Model Supporting Human-Machine Collaborative Learning of Object-Oriented ProgrammingHarsh ChitaliyaNo ratings yet
- Sensors: Cognitive Accessibility and Support in Special EducationDocument28 pagesSensors: Cognitive Accessibility and Support in Special EducationEstante de CoresNo ratings yet
- Marcoreferenciaiia Ceibal EngDocument28 pagesMarcoreferenciaiia Ceibal EngGustavo Garcia LutzNo ratings yet
- Constructionism and Ai - A History and Possible FuturesDocument13 pagesConstructionism and Ai - A History and Possible Futuresapi-691604939No ratings yet
- Artificial Intelligence Applications To Support K-12 Teachers and TeachingDocument20 pagesArtificial Intelligence Applications To Support K-12 Teachers and TeachingCristian CatalinNo ratings yet
- Ijcs 49 2 28Document11 pagesIjcs 49 2 28Duy PhanNo ratings yet
- Design Thinking and Agile Practices For Software EDocument7 pagesDesign Thinking and Agile Practices For Software EJoão Pedro de OliveiraNo ratings yet
- Artificial Intelligence in Computer Science Teaching and ResearchDocument5 pagesArtificial Intelligence in Computer Science Teaching and Researchsehar AmbreenNo ratings yet
- Using AI in Higher EducationDocument31 pagesUsing AI in Higher EducationDeepak ManeNo ratings yet
- Information Architecture: Enhancing User Experience through Artificial IntelligenceFrom EverandInformation Architecture: Enhancing User Experience through Artificial IntelligenceNo ratings yet
- Object Oriented Programming in Computer ScienceDocument14 pagesObject Oriented Programming in Computer SciencePertiwi Dwi NingsihNo ratings yet
- Teaching Introductory Artificial Intelligence With Pac-Man: January 2010Document6 pagesTeaching Introductory Artificial Intelligence With Pac-Man: January 2010mamadas mNo ratings yet
- 1 s2.0 S1877050920320512 MainDocument7 pages1 s2.0 S1877050920320512 MainSalahodin PandapatanNo ratings yet
- The Integration of Augmented Reality in The Virtual Learning Environment For Practical ActivitiesDocument6 pagesThe Integration of Augmented Reality in The Virtual Learning Environment For Practical ActivitiesbrenogangelottiNo ratings yet
- Revised Obe Syllabus Comprog4 Java GuiDocument5 pagesRevised Obe Syllabus Comprog4 Java GuiFernando Lipardo Jr.No ratings yet
- A Low-Cost and Simple Arduino-Based Educational Robotics KitDocument8 pagesA Low-Cost and Simple Arduino-Based Educational Robotics KitJerry HalibasNo ratings yet
- Short Term Course On: Artificial Intelligence and Machine Learning Using Python (AIMLP-2019)Document6 pagesShort Term Course On: Artificial Intelligence and Machine Learning Using Python (AIMLP-2019)VINOD BANSALNo ratings yet
- Inteligencia Artificial y Sus Implicaciones en La Educación: ABSTRACT - Currently in The Field of Artificial IntelligenceDocument5 pagesInteligencia Artificial y Sus Implicaciones en La Educación: ABSTRACT - Currently in The Field of Artificial IntelligenceAlex Asdasd MCNo ratings yet
- 30 - The Future of Human-AI Collaboration - Dellermann - 2021 - ResaltadoDocument10 pages30 - The Future of Human-AI Collaboration - Dellermann - 2021 - ResaltadoOpen Box LaptopsNo ratings yet
- 1 s2.0 S2666920X20300011 MainDocument5 pages1 s2.0 S2666920X20300011 Main皮花花No ratings yet
- Information Fusion: SciencedirectDocument34 pagesInformation Fusion: SciencedirectNitesh LaguriNo ratings yet
- Instructional BookletDocument92 pagesInstructional BookletAya GlidaNo ratings yet
- Co-Designing Machine Learning Apps in K-12 With Primary School ChildrenDocument3 pagesCo-Designing Machine Learning Apps in K-12 With Primary School ChildrenLucas FiordelisiNo ratings yet
- Role of Artificial Intelligence in Indian Education SystemDocument4 pagesRole of Artificial Intelligence in Indian Education Systemankur singhNo ratings yet
- The AI Revolution and Higher EducationDocument45 pagesThe AI Revolution and Higher EducationJhoanna DariaNo ratings yet
- S2D Web-Based Programmable Logic Controller Learning: SessionDocument6 pagesS2D Web-Based Programmable Logic Controller Learning: SessionAnthony BarrónNo ratings yet
- A Low-Cost and Simple Arduino-Based Educational Robotics KitDocument8 pagesA Low-Cost and Simple Arduino-Based Educational Robotics KitEder Coelho PaulaNo ratings yet
- Bsce Calculus 2 SyllabiDocument4 pagesBsce Calculus 2 SyllabiMiguelito DapieNo ratings yet
- IT 205-Intergartive Programming and Technologies 1Document15 pagesIT 205-Intergartive Programming and Technologies 1Aaron Jude PaelNo ratings yet
- Ontology-Based Modeling of The Learner in A Web Educational System: Towards Learning Analytics and Adaptive LearningDocument10 pagesOntology-Based Modeling of The Learner in A Web Educational System: Towards Learning Analytics and Adaptive LearningInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- DTISA09Document8 pagesDTISA09Kazzy SourNo ratings yet
- User Context Aware Delivery of E-Learning Material: Approach and ArchitectureDocument9 pagesUser Context Aware Delivery of E-Learning Material: Approach and ArchitecturePriya MahajanNo ratings yet
- Inclusion in Computing and Engineering EducationDocument8 pagesInclusion in Computing and Engineering EducationleluqueNo ratings yet
- Python Tutor: Philip Guo (2013)Document1 pagePython Tutor: Philip Guo (2013)Aaron RodriguezNo ratings yet
- (IJCST-V9I6P2) :yew Kee WongDocument6 pages(IJCST-V9I6P2) :yew Kee WongEighthSenseGroupNo ratings yet
- An Agile Framework For Teaching With Scrum in The IT Project Management ClassroomDocument14 pagesAn Agile Framework For Teaching With Scrum in The IT Project Management ClassroomMEHUL RANKANo ratings yet
- Block-Oriented Programming With Tangibles: An Engaging Way To Learn Computational Thinking SkillsDocument4 pagesBlock-Oriented Programming With Tangibles: An Engaging Way To Learn Computational Thinking SkillsAlar Urrutikoetxea VicenteNo ratings yet
- Assessing IOT Projects in University Education - A Framework For Problem-Based LearningDocument7 pagesAssessing IOT Projects in University Education - A Framework For Problem-Based LearningAnvit NegiNo ratings yet
- Using App Inventor 2 in A Summer Programming Workshop: Improvements Over Previous YearsDocument6 pagesUsing App Inventor 2 in A Summer Programming Workshop: Improvements Over Previous YearsMathiasReolonNo ratings yet
- Intro To AI - Teacher Guide - aiEDUDocument24 pagesIntro To AI - Teacher Guide - aiEDUinfoNo ratings yet
- and Install OfficeDocument1 pageand Install OfficePreeti SinghalNo ratings yet
- AI Project Showcase PDFDocument16 pagesAI Project Showcase PDFValli SankaranarayananNo ratings yet
- 21CLD Student Work RubricsDocument44 pages21CLD Student Work RubricsSinclair LijNo ratings yet
- Virtual Robotics Coding Proposal For Schools - May 2021Document19 pagesVirtual Robotics Coding Proposal For Schools - May 2021Preeti SinghalNo ratings yet
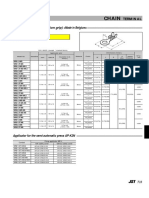
- Chain: SRB Series (With Insulation Grip)Document1 pageChain: SRB Series (With Insulation Grip)shankarNo ratings yet
- Chapter 9Document28 pagesChapter 9Aniket BatraNo ratings yet
- 3-A Y 3-B Brenda Franco DíazDocument4 pages3-A Y 3-B Brenda Franco DíazBRENDA FRANCO DIAZNo ratings yet
- The Limits of The Sectarian Narrative in YemenDocument19 pagesThe Limits of The Sectarian Narrative in Yemenهادي قبيسيNo ratings yet
- MC4 CoCU 6 - Welding Records and Report DocumentationDocument8 pagesMC4 CoCU 6 - Welding Records and Report Documentationnizam1372100% (1)
- Shoshana Bulka PragmaticaDocument17 pagesShoshana Bulka PragmaticaJessica JonesNo ratings yet
- X Lube Bushes PDFDocument8 pagesX Lube Bushes PDFDavid TurnerNo ratings yet
- 12 Logarithm Approximate FloatingDocument6 pages12 Logarithm Approximate FloatingPhilippe Englert VelhaNo ratings yet
- (Polish Journal of Sport and Tourism) The Estimation of The RAST Test Usefulness in Monitoring The Anaerobic Capacity of Sprinters in AthleticsDocument5 pages(Polish Journal of Sport and Tourism) The Estimation of The RAST Test Usefulness in Monitoring The Anaerobic Capacity of Sprinters in AthleticsAfizieNo ratings yet
- Very Hungry Caterpillar Clip CardsDocument5 pagesVery Hungry Caterpillar Clip CardsARTGRAVETO ARTNo ratings yet
- Cella Di Carico Sartorius MP77 eDocument3 pagesCella Di Carico Sartorius MP77 eNCNo ratings yet
- Pizza Restaurant PowerPoint TemplatesDocument49 pagesPizza Restaurant PowerPoint TemplatesAindrila BeraNo ratings yet
- S3 U4 MiniTestDocument3 pagesS3 U4 MiniTestĐinh Thị Thu HàNo ratings yet
- ING C1 CO JUN2016 CorrectorDocument6 pagesING C1 CO JUN2016 CorrectoraciameNo ratings yet
- QSasDocument50 pagesQSasArvin Delos ReyesNo ratings yet
- Performance Task 2Document3 pagesPerformance Task 2Edrose WycocoNo ratings yet
- Product Handbook Arendal 1961 Series SubwoofersDocument44 pagesProduct Handbook Arendal 1961 Series SubwoofersDomagoj KovacevicNo ratings yet
- Using Your Digital Assets On Q-GlobalDocument3 pagesUsing Your Digital Assets On Q-GlobalRemik BuczekNo ratings yet
- Evan Lagueux - H Argument EssayDocument7 pagesEvan Lagueux - H Argument Essayapi-692561087No ratings yet
- SANDWICH Elisa (Procedure) - Immunology Virtual Lab I - Biotechnology and Biomedical Engineering - Amrita Vishwa Vidyapeetham Virtual LabDocument2 pagesSANDWICH Elisa (Procedure) - Immunology Virtual Lab I - Biotechnology and Biomedical Engineering - Amrita Vishwa Vidyapeetham Virtual LabsantonuNo ratings yet
- BLG311 Cell Biology: Course Outline (Fall 2020)Document11 pagesBLG311 Cell Biology: Course Outline (Fall 2020)Emilija BjelajacNo ratings yet
- 3-Phase Short-Circuit Current (Isc) at Any Point Within A LV Installation - Electrical Installation GuideDocument6 pages3-Phase Short-Circuit Current (Isc) at Any Point Within A LV Installation - Electrical Installation GuideYuukinoriNo ratings yet
- EDAG0007Document5 pagesEDAG0007krunalNo ratings yet