You might also like
- Assignment 03: 1 Explain Unit Step Response of First Order Linear Time Invariant SystemsDocument6 pagesAssignment 03: 1 Explain Unit Step Response of First Order Linear Time Invariant SystemsSyed AfzalNo ratings yet
- Control System Labsheet Exp4Document8 pagesControl System Labsheet Exp4REDWAN AHMED MIAZEENo ratings yet
- Flow System ControlDocument7 pagesFlow System ControlAli Waleed JaafarNo ratings yet
- Second Order SystemDocument11 pagesSecond Order SystemSaravanan SukumaranNo ratings yet
- Module 4: Time Response of Discrete Time Systems: Lecture Note 1Document5 pagesModule 4: Time Response of Discrete Time Systems: Lecture Note 1nirmal_inbox100% (1)
- UGRD-EE6301-Feedback-and-Control-Systems-Overall-Midterm QuizessDocument13 pagesUGRD-EE6301-Feedback-and-Control-Systems-Overall-Midterm QuizessJitlee PapaNo ratings yet
- Control SystemDocument11 pagesControl Systembalaji1986No ratings yet
- MTX Unit 4Document21 pagesMTX Unit 4Chetan HoleNo ratings yet
- Chapter 4 ControlDocument44 pagesChapter 4 ControlFootball HDNo ratings yet
- Control System Engineering Lab: Avanish Niranjan 17104088 EEN 210Document17 pagesControl System Engineering Lab: Avanish Niranjan 17104088 EEN 210Umang SoinNo ratings yet
- Automated Control Unit III Part 1,2Document13 pagesAutomated Control Unit III Part 1,2Rakgnar LodbrokNo ratings yet
- 5 2020 04 13!08 16 05 Am PDFDocument17 pages5 2020 04 13!08 16 05 Am PDFUM ZaidNo ratings yet
- QLabs Controls Instructor Resources Sample QUBE Servo 2 Position Control PDFDocument6 pagesQLabs Controls Instructor Resources Sample QUBE Servo 2 Position Control PDFBite RamanNo ratings yet
- Performance CriterionDocument28 pagesPerformance CriterionAbd Al Kareem AzoozNo ratings yet
- 05 - Second Order System and Higher OrderDocument11 pages05 - Second Order System and Higher OrderhomitNo ratings yet
- QUBE-Servo 2 - Second Order Systems Workbook (Student)Document6 pagesQUBE-Servo 2 - Second Order Systems Workbook (Student)daanish petkarNo ratings yet
- Assignment 04: 1 What Is Meant by Stability of A Control System? Explain Routh Stability CriteriaDocument4 pagesAssignment 04: 1 What Is Meant by Stability of A Control System? Explain Routh Stability CriteriaSyed AfzalNo ratings yet
- Experiment No: 2 Determine The Step Response of First Order and Second Order System and Obtain Their Transfer FunctionDocument11 pagesExperiment No: 2 Determine The Step Response of First Order and Second Order System and Obtain Their Transfer FunctionYAKALA RAVIKUMARNo ratings yet
- Lecture 04 Feedback Control System CharacteristicsDocument23 pagesLecture 04 Feedback Control System Characteristicscesar ruizNo ratings yet
- Assignment 04: 1 What Is Meant by Stability of A Control System? Explain Routh Stability CriteriaDocument4 pagesAssignment 04: 1 What Is Meant by Stability of A Control System? Explain Routh Stability CriteriaSyed AfzalNo ratings yet
- 05 - Second Order System and Higher OrderDocument10 pages05 - Second Order System and Higher OrderStellaNo ratings yet
- CSL05Document6 pagesCSL05Mahnoor KhanNo ratings yet
- EEN-305 Advanced Control Systems Lab ReportDocument16 pagesEEN-305 Advanced Control Systems Lab ReportRitik MathurNo ratings yet
- Department of Petrochemical Engineering College of Technical Engineering University of Polytechnic-DuhokDocument11 pagesDepartment of Petrochemical Engineering College of Technical Engineering University of Polytechnic-DuhokWalid AdnanNo ratings yet
- QUBE-Servo Second-Order Systems Workbook (Student)Document5 pagesQUBE-Servo Second-Order Systems Workbook (Student)Luis EnriquezNo ratings yet
- Chapter 10 PID 1Document36 pagesChapter 10 PID 1Taufiq GalangNo ratings yet
- The Design of Feedback Control SystemsDocument36 pagesThe Design of Feedback Control SystemsNirmal Kumar PandeyNo ratings yet
- Contoh REPORT Open Ended CONTROLDocument32 pagesContoh REPORT Open Ended CONTROLtiko lolipopNo ratings yet
- Exp2 Time ResponseDocument3 pagesExp2 Time Responsegangam aashrithNo ratings yet
- Time Response of Second Order SystemDocument6 pagesTime Response of Second Order System12343567890No ratings yet
- Time and Frequency Response Analysis of Fuzzy Controller: IEEE Member Asso. Prof., IEEE MemberDocument10 pagesTime and Frequency Response Analysis of Fuzzy Controller: IEEE Member Asso. Prof., IEEE MemberPero01No ratings yet
- Inno2020 Emt4203 Control II Chap2a PidsDocument35 pagesInno2020 Emt4203 Control II Chap2a Pidskabuej3No ratings yet
- Week 7A - Online Classes - S2020Document16 pagesWeek 7A - Online Classes - S2020Muhammad Tayyab YousafzaiNo ratings yet
- Lab # 6 Time Response AnalysisDocument10 pagesLab # 6 Time Response AnalysisFahad AneebNo ratings yet
- Chapter 2p5p5Document4 pagesChapter 2p5p5Manasa Sathyanarayana SNo ratings yet
- 1) 1 Order Systems Parameter Changes (K and A)Document9 pages1) 1 Order Systems Parameter Changes (K and A)Ali El-GazzarNo ratings yet
- Presentation For ControllerDocument42 pagesPresentation For ControllerAlakshendra JohariNo ratings yet
- CS LabReport 3Document10 pagesCS LabReport 3Muhammad AfzaalNo ratings yet
- Lesson 6 PID Control of Heat Exchanger Temp PDFDocument2 pagesLesson 6 PID Control of Heat Exchanger Temp PDFJenny GoNo ratings yet
- Lecture 6 2nd Order System Time ResponseDocument81 pagesLecture 6 2nd Order System Time ResponseFahad ChaudharyNo ratings yet
- IN 227 Control Systems DesignDocument11 pagesIN 227 Control Systems DesignAbhinavNo ratings yet
- Cs-Module 1 NotesDocument58 pagesCs-Module 1 NotesSuprithaNo ratings yet
- Step Response of First Order System Expt ChE Lab 2Document5 pagesStep Response of First Order System Expt ChE Lab 2simonatics08No ratings yet
- Control System Design by Frequency Response Using Matlab: Riyadh Nazar Ali AL-Gburi, Ali Saleh AzizDocument7 pagesControl System Design by Frequency Response Using Matlab: Riyadh Nazar Ali AL-Gburi, Ali Saleh AzizAmanNo ratings yet
- CD 08 Apendice Teoría Básica de ControlDocument47 pagesCD 08 Apendice Teoría Básica de ControlAnonymous AtAGVssJNo ratings yet
- Time Response Analysis of SystemDocument2 pagesTime Response Analysis of SystemJames Lee IlaganNo ratings yet
- 04 Performance CriteriaDocument14 pages04 Performance CriteriaLincolyn MoyoNo ratings yet
- Tda VS FdaDocument18 pagesTda VS FdaJames AlexNo ratings yet
- CHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsDocument6 pagesCHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsIzzat AzmanNo ratings yet
- Model Questions Class Test SolutionDocument22 pagesModel Questions Class Test SolutionAnanthan SrijithNo ratings yet
- Experiment No: 3 Design and Evaluation of Second Order SystemDocument6 pagesExperiment No: 3 Design and Evaluation of Second Order SystemBorse RajNo ratings yet
- Control Systems N6 TERM 3/2018: Test 2Document11 pagesControl Systems N6 TERM 3/2018: Test 2Green MichaelsNo ratings yet
- CHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsDocument6 pagesCHAPTER 1: Introduction To Discrete-Time Control Systems Digital Control SystemsIzzat AzmanNo ratings yet
- Control System - Exprmnt 8Document2 pagesControl System - Exprmnt 8VarunNo ratings yet
- CHE492 08 PC Flow Control TrainerDocument47 pagesCHE492 08 PC Flow Control TrainerAnkit Malhotra100% (2)
- 130403control System - Unit12Document4 pages130403control System - Unit12Nitin GoyalNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Harnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingFrom EverandHarnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- 2 PerceptionGDocument37 pages2 PerceptionGSyed AfzalNo ratings yet
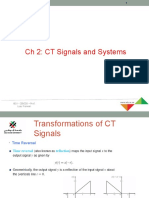
- Chapter 2 SignalsDocument53 pagesChapter 2 SignalsSyed AfzalNo ratings yet
- Power Electronics by D. W. Hart Chapter 07Document18 pagesPower Electronics by D. W. Hart Chapter 07Syed AfzalNo ratings yet
- Be Less Than The DC Term (Average Value)Document28 pagesBe Less Than The DC Term (Average Value)Syed AfzalNo ratings yet
- Power Electronics by D. W. Hart Chapter 03Document20 pagesPower Electronics by D. W. Hart Chapter 03Syed AfzalNo ratings yet
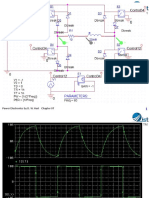
- Pspice Simulation of Feedback Control: Power Electronics by D. W. Hart Chapter 07Document19 pagesPspice Simulation of Feedback Control: Power Electronics by D. W. Hart Chapter 07Syed AfzalNo ratings yet
- 1 IntroductioDocument16 pages1 IntroductioSyed AfzalNo ratings yet
- 7.13 Power Supply Control Input Voltage and Duty Ratio.: Power Electronics by D. W. Hart Chapter 07Document12 pages7.13 Power Supply Control Input Voltage and Duty Ratio.: Power Electronics by D. W. Hart Chapter 07Syed AfzalNo ratings yet
- Power Electronics by D. W. Hart Chapter 07Document25 pagesPower Electronics by D. W. Hart Chapter 07Syed AfzalNo ratings yet
- Power Electronics by D. W. Hart Chapter 07Document25 pagesPower Electronics by D. W. Hart Chapter 07Syed AfzalNo ratings yet
- Creating A DC Voltage From An AC Source: Power Electronics by D. W. Hart Chapter 03Document41 pagesCreating A DC Voltage From An AC Source: Power Electronics by D. W. Hart Chapter 03Syed AfzalNo ratings yet
- Power Electronics by D. W. Hart Chapter 06Document10 pagesPower Electronics by D. W. Hart Chapter 06Syed AfzalNo ratings yet
- Power Electronics by Daniel W. Hart Chapter 04Document4 pagesPower Electronics by Daniel W. Hart Chapter 04Syed AfzalNo ratings yet
- Power Electronics by D. W. Hart Chapter 06Document19 pagesPower Electronics by D. W. Hart Chapter 06Syed AfzalNo ratings yet
- Pe 36 Ee17Document21 pagesPe 36 Ee17Syed AfzalNo ratings yet
- Power Electronics by D. W. Hart Chapter 07Document13 pagesPower Electronics by D. W. Hart Chapter 07Syed AfzalNo ratings yet
- Assignment #02 - 15 Oct To 22 Oct 2021Document21 pagesAssignment #02 - 15 Oct To 22 Oct 2021Syed AfzalNo ratings yet
- Power Electronics by D. W. Hart Chapter 03Document15 pagesPower Electronics by D. W. Hart Chapter 03Syed AfzalNo ratings yet
- For Different Values of ALPHA: Power Electronics by D. W. Hart Chapter 03Document16 pagesFor Different Values of ALPHA: Power Electronics by D. W. Hart Chapter 03Syed AfzalNo ratings yet
- Pe 26 Ee17Document23 pagesPe 26 Ee17Syed AfzalNo ratings yet
- Continuous-Current Case: Power Electronics by D. W. Hart Chapter 06Document20 pagesContinuous-Current Case: Power Electronics by D. W. Hart Chapter 06Syed AfzalNo ratings yet
- Power Electronics by Daniel W. Hart Chapter 05Document20 pagesPower Electronics by Daniel W. Hart Chapter 05Syed AfzalNo ratings yet
- Power Electronics by Daniel W. Hart Chapter 04Document13 pagesPower Electronics by Daniel W. Hart Chapter 04Syed AfzalNo ratings yet
- Full-Wave Rectifier With RL-Source Load-Continuous Current: Power Electronics by D.W.Hart Chapter 04Document20 pagesFull-Wave Rectifier With RL-Source Load-Continuous Current: Power Electronics by D.W.Hart Chapter 04Syed AfzalNo ratings yet
- Power Electronics by D.W.Hart Chapter 04Document12 pagesPower Electronics by D.W.Hart Chapter 04Syed AfzalNo ratings yet
- Power Electronics by Daniel W. Hart Chapter 01Document19 pagesPower Electronics by Daniel W. Hart Chapter 01Syed AfzalNo ratings yet
- Resistive Load Creating A DC Component Using An Electronic SwitchDocument22 pagesResistive Load Creating A DC Component Using An Electronic SwitchSyed AfzalNo ratings yet
- Fourier Series For A Periodic Function F (T) : Power Electronics by D. W. Hart Chapter 02Document43 pagesFourier Series For A Periodic Function F (T) : Power Electronics by D. W. Hart Chapter 02Syed AfzalNo ratings yet
- Reducing Load Current Harmonics: Power Electronics by D. W. Hart Chapter 03Document5 pagesReducing Load Current Harmonics: Power Electronics by D. W. Hart Chapter 03Syed AfzalNo ratings yet
- Circuit For Forced Response From Ac Source : Power Electronics by D. W. Hart Chapter 03Document21 pagesCircuit For Forced Response From Ac Source : Power Electronics by D. W. Hart Chapter 03Syed AfzalNo ratings yet
- E Dies Astm d5963 CuttingdiesDocument1 pageE Dies Astm d5963 CuttingdiesNate MercerNo ratings yet
- Entry Req EngDocument4 pagesEntry Req EngMatheus StefaniNo ratings yet
- BSMS Drexel ScheduleDocument4 pagesBSMS Drexel ScheduleAmy ZhiNo ratings yet
- Vibrational SpectrosDocument6 pagesVibrational Spectrosprasant906No ratings yet
- Full Report XeriaDocument11 pagesFull Report XeriaHamierul MohamadNo ratings yet
- Basics of RainforestsDocument14 pagesBasics of RainforestspsrelianceNo ratings yet
- GBC Module 1Document69 pagesGBC Module 1MOHAMED82% (129)
- Top10 Structural Engineer Interview Questions and AnswersDocument17 pagesTop10 Structural Engineer Interview Questions and Answersmodest_dhu100% (1)
- First M.SC Nursing Degree Examinations - October 2012: Q.P.Code 101375 Reg. No.:....................Document1 pageFirst M.SC Nursing Degree Examinations - October 2012: Q.P.Code 101375 Reg. No.:....................srinivasanaNo ratings yet
- Notes Physics 1Document668 pagesNotes Physics 1张书No ratings yet
- Code For VirtualboxDocument1 pageCode For VirtualboxAnonymous 4m8ueTNo ratings yet
- Modules in Grade 12: Quarter 1 - Week 3 Academic Track - StemDocument23 pagesModules in Grade 12: Quarter 1 - Week 3 Academic Track - StemZenarose MirandaNo ratings yet
- Kernel One SBDocument140 pagesKernel One SBronanNo ratings yet
- Seminar ReportDocument25 pagesSeminar ReportChethan kumar D NNo ratings yet
- Deed of Sale SampleDocument3 pagesDeed of Sale Samplebarbiegirl9497No ratings yet
- Torque SpecsDocument21 pagesTorque SpecssaturnayalaNo ratings yet
- Wa0009 PDFDocument22 pagesWa0009 PDFRameshwari ChaudharyNo ratings yet
- 2011 07 IDIP Unit A Past PaperDocument4 pages2011 07 IDIP Unit A Past Paperfh71No ratings yet
- Effect of Soil Deformability On RigidityDocument11 pagesEffect of Soil Deformability On RigidityCesar Basantes AvalosNo ratings yet
- .50 BMG - Wikipedia PDFDocument13 pages.50 BMG - Wikipedia PDFAce ActionNo ratings yet
- ECE Formula SheetDocument7 pagesECE Formula SheetMahendra ReddyNo ratings yet
- Holmstrom1982 Moral Hazard in TeamsDocument18 pagesHolmstrom1982 Moral Hazard in TeamsfaqeveaNo ratings yet
- De Quervains TenosynovitisDocument2 pagesDe Quervains TenosynovitisomboNo ratings yet
- PolicySchedule PDFDocument1 pagePolicySchedule PDFSandeep Borse100% (1)
- She-Ra Gem Tutorial by Anna Anderson - Cosplay and CoffeeDocument13 pagesShe-Ra Gem Tutorial by Anna Anderson - Cosplay and CoffeeAnna AndersonNo ratings yet
- 2022 Grade 10 Study GuideDocument85 pages2022 Grade 10 Study Guideeskaykhan11No ratings yet
- Coerver Training DrillsDocument5 pagesCoerver Training Drillsburvi200111860% (1)
- USEFUL TIPS For Repairing LAPTOPDocument17 pagesUSEFUL TIPS For Repairing LAPTOPGeronJosephusLofrancoManaiz100% (1)
- Sheet #6 Ensemble + Neural Nets + Linear Regression + Backpropagation + CNNDocument4 pagesSheet #6 Ensemble + Neural Nets + Linear Regression + Backpropagation + CNNrowaida elsayedNo ratings yet
- NCERT Exemplar Class 8 Maths Solutions Chapter 3 Square-Square Root & Cube-Cube RootDocument77 pagesNCERT Exemplar Class 8 Maths Solutions Chapter 3 Square-Square Root & Cube-Cube Rootdeep34No ratings yet