You might also like
- Lecture 7 Loss Function and RegularizationDocument38 pagesLecture 7 Loss Function and RegularizationUtkarsh BhalodeNo ratings yet
- Web PageDocument13 pagesWeb PageSwapan Kumar SahaNo ratings yet
- Principal Component Analysis (PCA) : Dimensionality Reduction Using PcaDocument21 pagesPrincipal Component Analysis (PCA) : Dimensionality Reduction Using Pcaneeraj12121No ratings yet
- Chapter 3Document80 pagesChapter 3getaw bayuNo ratings yet
- Chapter14 Econometrics Stein RuleestimationDocument7 pagesChapter14 Econometrics Stein RuleestimationIftikhar AhmedNo ratings yet
- Lecture2012 7Document51 pagesLecture2012 7abhi7112No ratings yet
- Chapter 7: Estimating The Variance of An Estimate's Probability DistributionDocument31 pagesChapter 7: Estimating The Variance of An Estimate's Probability DistributionPoonam NaiduNo ratings yet
- WINSEM2020-21 CSE4020 ETH VL2020210504996 Reference Material I 26-Apr-2021 ClusteringDocument43 pagesWINSEM2020-21 CSE4020 ETH VL2020210504996 Reference Material I 26-Apr-2021 ClusteringRenuSharmaNo ratings yet
- Package CMC': R Topics DocumentedDocument9 pagesPackage CMC': R Topics DocumentedCristian ZuñigaNo ratings yet
- Lab 9: Matrices and Graphs - Spectral Techniques: Monday, November 12 Compsci 531, Fall 2018Document25 pagesLab 9: Matrices and Graphs - Spectral Techniques: Monday, November 12 Compsci 531, Fall 2018Ankit MalhotraNo ratings yet
- Lecture Guide Math006-1 PDFDocument49 pagesLecture Guide Math006-1 PDFJang ObisNo ratings yet
- PDFDocument37 pagesPDFaymanNo ratings yet
- Hw4 ProbsDocument12 pagesHw4 ProbssfaawrgawgNo ratings yet
- AEphd 2023 Week 2 SmallDocument10 pagesAEphd 2023 Week 2 SmallEku BoldNo ratings yet
- Introduction To Algorithms: NP-CompleteDocument19 pagesIntroduction To Algorithms: NP-CompleteRima MkhNo ratings yet
- Binomial Coefficients and Subsets Enumeration: The Basis of CombinatoricsDocument20 pagesBinomial Coefficients and Subsets Enumeration: The Basis of CombinatoricsJean-Pierre CoffeNo ratings yet
- Introduction To Data AssociationDocument45 pagesIntroduction To Data AssociationnakouyNo ratings yet
- Don'T Panic!: A Guide To MATA21 Analysis in One Variable Version: January 22, 2020 Jan-Fredrik OlsenDocument100 pagesDon'T Panic!: A Guide To MATA21 Analysis in One Variable Version: January 22, 2020 Jan-Fredrik Olsen1111111111111-859751No ratings yet
- Regression With One RegressorDocument25 pagesRegression With One RegressorFatemeh IglinskyNo ratings yet
- MidSem 202122 SolutionDocument7 pagesMidSem 202122 Solutionf20202072No ratings yet
- Lecture Notes On ClusteringDocument10 pagesLecture Notes On Clusteringyuyang zhangNo ratings yet
- Lecture 13Document12 pagesLecture 13Aviral UpadhyayNo ratings yet
- Lec 3Document47 pagesLec 3Anant AgnihotriNo ratings yet
- Where Did The BLOSUM62 Alignment Score Matrix Come From?: PrimerDocument2 pagesWhere Did The BLOSUM62 Alignment Score Matrix Come From?: PrimerKary ParraNo ratings yet
- Cse291d 7Document39 pagesCse291d 7ballechaseNo ratings yet
- Annova PDFDocument22 pagesAnnova PDFRKJhalendraNo ratings yet
- Corepure1 Chapter 1::: Complex NumbersDocument27 pagesCorepure1 Chapter 1::: Complex NumbersJon HadleyNo ratings yet
- Corepure2 Chapter 6::: Hyperbolic FunctionsDocument46 pagesCorepure2 Chapter 6::: Hyperbolic FunctionsMadalina ChiriloiNo ratings yet
- PVB301 2021 W8 Quantum Statistical MechanicsDocument44 pagesPVB301 2021 W8 Quantum Statistical MechanicsliquefiedbutterNo ratings yet
- Codigo Box Cox SASDocument37 pagesCodigo Box Cox SASRodrigo Romo MuñozNo ratings yet
- BA4101 - Statistics - For - Management - RevisedDocument21 pagesBA4101 - Statistics - For - Management - RevisedAbishek balajiNo ratings yet
- Equilibrium Dialysis Multiple Site Binding: Thinking QuestionDocument7 pagesEquilibrium Dialysis Multiple Site Binding: Thinking QuestionEmmanuel HoangNo ratings yet
- Lecture 20Document22 pagesLecture 20huey4966No ratings yet
- Multiple Direction ExcitationDocument2 pagesMultiple Direction Excitationcelestinodl736No ratings yet
- Statistics Part1 2013Document17 pagesStatistics Part1 2013Victor De Paula VilaNo ratings yet
- Lecture 4 0 From Keypoints To CorrespondencesDocument20 pagesLecture 4 0 From Keypoints To CorrespondencesEliNo ratings yet
- Supplementary Notes On Partial FractionsDocument10 pagesSupplementary Notes On Partial FractionsMmatshepo Molefe Waha MofokengNo ratings yet
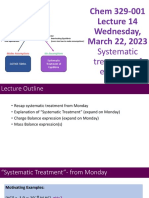
- Chem 329 Spring 2023 Dorris Lecture 15 Systematic Treatment For StudentsDocument18 pagesChem 329 Spring 2023 Dorris Lecture 15 Systematic Treatment For StudentsPRERANA SAMPATHNo ratings yet
- m07 LogicDocument74 pagesm07 LogicchakravarthyashokNo ratings yet
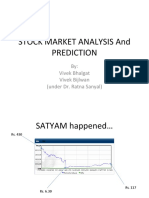
- Stock Market Analysis and PredictionDocument26 pagesStock Market Analysis and Predictionhitesh_qsNo ratings yet
- Computational Linguistics II: Parsing Tomita's Parser: Laura Kallmeyer University of T Ubingen Winter Term 2006/2007Document4 pagesComputational Linguistics II: Parsing Tomita's Parser: Laura Kallmeyer University of T Ubingen Winter Term 2006/2007Rjneesh KaurNo ratings yet
- 2018 Yearly Exam SolutionsDocument7 pages2018 Yearly Exam SolutionsYu-Tang LinNo ratings yet
- Lecture 17Document7 pagesLecture 17minimailNo ratings yet
- CalculusDocument9 pagesCalculusMahmud Alam NauNo ratings yet
- Quantum Information & ComputingDocument32 pagesQuantum Information & ComputingJulien GaconNo ratings yet
- Ising ProjDocument12 pagesIsing ProjSyarifatul UlfaNo ratings yet
- Final Exam ArtificialDocument2 pagesFinal Exam ArtificialZaidBNo ratings yet
- Gap StatisticDocument32 pagesGap StatisticKikie Goguma GyuNo ratings yet
- Discrete Random Variables: Online Page ProofsDocument32 pagesDiscrete Random Variables: Online Page ProofsBella CarrNo ratings yet
- Learning With Linear Neurons: Adapted From Lectures by Geoffrey Hinton and Others Updated by N. Intrator, May 2007Document59 pagesLearning With Linear Neurons: Adapted From Lectures by Geoffrey Hinton and Others Updated by N. Intrator, May 2007Mohammad Al SamhouriNo ratings yet
- Tutorial 10Document18 pagesTutorial 10Yang ElvisQUNo ratings yet
- ESM 244 Lecture 4Document39 pagesESM 244 Lecture 4László SágiNo ratings yet
- Logic and Boolean AlgebraDocument79 pagesLogic and Boolean Algebranastaranesmaeilzadeh2No ratings yet
- Regression Logistic 4Document51 pagesRegression Logistic 4TofikNo ratings yet
- MA225 - DifferentiationDocument14 pagesMA225 - DifferentiationRebecca RumseyNo ratings yet
- Analysis and Control of Nonlinear Infinite Dimensional SystemsFrom EverandAnalysis and Control of Nonlinear Infinite Dimensional SystemsNo ratings yet
- Emt 341 Class Wk1Document19 pagesEmt 341 Class Wk1Ashraf YusofNo ratings yet
- Emt 341 Class Wk4Document71 pagesEmt 341 Class Wk4Ashraf YusofNo ratings yet
- EMT 341 Class WK3Document26 pagesEMT 341 Class WK3Ashraf YusofNo ratings yet
- EMT341 Lect4 202021Document14 pagesEMT341 Lect4 202021Ashraf YusofNo ratings yet
- EMT341 Lect5 202021Document32 pagesEMT341 Lect5 202021Ashraf YusofNo ratings yet
- EMT341 Lect2 202021aDocument26 pagesEMT341 Lect2 202021aAshraf YusofNo ratings yet
- 13 MogDocument101 pages13 MogAshraf YusofNo ratings yet
- Idp2020 ConquerorsDocument70 pagesIdp2020 ConquerorsAshraf YusofNo ratings yet
- An Implementation of Illuminance Meter Using Light Dependent Resistor Integrated With Labview ProgramDocument11 pagesAn Implementation of Illuminance Meter Using Light Dependent Resistor Integrated With Labview ProgramAshraf YusofNo ratings yet
- Sistem Irigasi Otomatis Pada Tanaman Padi Menggunakan Arduino Dan Sensor Kelembapan TanahDocument11 pagesSistem Irigasi Otomatis Pada Tanaman Padi Menggunakan Arduino Dan Sensor Kelembapan TanahAshraf YusofNo ratings yet
- Management: Ong Wei Loong Zainul Abidin Bin Ishak Ashraf Bin Mohd Yusof Abdul Muis Bin Mustpha Shahrul Afnan Bin AhmadDocument3 pagesManagement: Ong Wei Loong Zainul Abidin Bin Ishak Ashraf Bin Mohd Yusof Abdul Muis Bin Mustpha Shahrul Afnan Bin AhmadAshraf YusofNo ratings yet
- Arduino-Based Smart Irrigation Using Water Flow Sensor, Soil Moisture Sensor, Temperature Sensor and Esp8266 Wifi ModuleDocument4 pagesArduino-Based Smart Irrigation Using Water Flow Sensor, Soil Moisture Sensor, Temperature Sensor and Esp8266 Wifi ModuleAshraf YusofNo ratings yet
- Chapter 5 - System FunctionDocument19 pagesChapter 5 - System FunctionAshraf YusofNo ratings yet
- Food DeliveryDocument9 pagesFood DeliveryAshraf YusofNo ratings yet
- Reliability & Failure AnalysisDocument31 pagesReliability & Failure AnalysisAshraf YusofNo ratings yet
- EMT 480 - Lecture 6Document36 pagesEMT 480 - Lecture 6Ashraf YusofNo ratings yet
- Faculty of Electronic Engineering Technology Universiti Malaysia Perlis (Unimap)Document4 pagesFaculty of Electronic Engineering Technology Universiti Malaysia Perlis (Unimap)Ashraf YusofNo ratings yet
- Singular & Plural Nouns: Regular PluralsDocument4 pagesSingular & Plural Nouns: Regular PluralsМарина ВетерNo ratings yet
- Microsoft Official Course: Installing and Configuring Windows Server 2012Document18 pagesMicrosoft Official Course: Installing and Configuring Windows Server 2012jttodorovNo ratings yet
- MNLG 4Document2 pagesMNLG 4Kanchana Venkatesh39% (18)
- Presente Progresive TenseDocument21 pagesPresente Progresive TenseAriana ChanganaquiNo ratings yet
- Presentation On HR Department of Mobilink.Document18 pagesPresentation On HR Department of Mobilink.Sadaf YaqoobNo ratings yet
- Map Index: RD - To CE MP AR KDocument1 pageMap Index: RD - To CE MP AR KswaggerboxNo ratings yet
- Di Franco Amended Factum 2021-05-03Document30 pagesDi Franco Amended Factum 2021-05-03Michael BueckertNo ratings yet
- Automated Long-Distance HADR ConfigurationsDocument73 pagesAutomated Long-Distance HADR ConfigurationsKan DuNo ratings yet
- LITERATURE MATRIX PLAN LastimosaDocument2 pagesLITERATURE MATRIX PLAN LastimosaJoebelle LastimosaNo ratings yet
- Item Bank - Science 5 - 2ND QuarterDocument11 pagesItem Bank - Science 5 - 2ND QuarterJasmine AguilaNo ratings yet
- BrookfieldDocument8 pagesBrookfieldFariha Naseer Haral - 28336/TCHR/JVAITNo ratings yet
- IOSH Managing Safely Leaflet For Training ProvidersDocument6 pagesIOSH Managing Safely Leaflet For Training ProvidersShakil Ahmad AligNo ratings yet
- Faust Part Two - Johann Wolfgang Von GoetheDocument401 pagesFaust Part Two - Johann Wolfgang Von GoetherharsianiNo ratings yet
- ArticlesOfConfederation Constitution 3.0Document6 pagesArticlesOfConfederation Constitution 3.0ChristinaNo ratings yet
- Stephen Law Morality Without GodDocument9 pagesStephen Law Morality Without GodJiReH MeCuaNo ratings yet
- Rainfall Runoff ModellingDocument23 pagesRainfall Runoff ModellingmansikakaniNo ratings yet
- 2016 01 15 12 00 22 PDFDocument26 pages2016 01 15 12 00 22 PDFABHIJEET SHARMANo ratings yet
- Science Fiction FilmsDocument5 pagesScience Fiction Filmsapi-483055750No ratings yet
- 2nd Exam 201460 UpdatedDocument12 pages2nd Exam 201460 UpdatedAlbert LuchyniNo ratings yet
- English 7 Compare Contrast The People Could Fly Harriet TubmanDocument3 pagesEnglish 7 Compare Contrast The People Could Fly Harriet Tubmanapi-508729334No ratings yet
- Strengthsfinder Sept GBMDocument32 pagesStrengthsfinder Sept GBMapi-236473176No ratings yet
- BSP Training MatrixDocument2 pagesBSP Training MatrixLeonisa V. BraganzaNo ratings yet
- Definition Environmental Comfort in IdDocument43 pagesDefinition Environmental Comfort in Idharis hambaliNo ratings yet
- Introduction To Computational Fluid DynamicsDocument3 pagesIntroduction To Computational Fluid DynamicsJonyzhitop TenorioNo ratings yet
- Finding Roots of Equations Bracketing MethodsDocument11 pagesFinding Roots of Equations Bracketing MethodsmebrahtenNo ratings yet
- Berms For Stablizing Earth Retaining Structures: Youssef Gomaa Youssef Morsi B.SC., Civil EngineeringDocument212 pagesBerms For Stablizing Earth Retaining Structures: Youssef Gomaa Youssef Morsi B.SC., Civil EngineeringChan KNo ratings yet
- Tutorials in Complex Photonic Media SPIE Press Monograph Vol PM194 PDFDocument729 pagesTutorials in Complex Photonic Media SPIE Press Monograph Vol PM194 PDFBadunoniNo ratings yet
- Chapter 2Document16 pagesChapter 2nannaNo ratings yet
- Chapter 3 SIP MethodologyDocument43 pagesChapter 3 SIP MethodologyMáxyne NalúalNo ratings yet
- Book Review Leffel Cateura, Oil Painting SecretsDocument4 pagesBook Review Leffel Cateura, Oil Painting SecretsAnonymous H3kGwRFiENo ratings yet