You might also like
- Unit 2 CaoDocument8 pagesUnit 2 CaoZamal AhmedNo ratings yet
- Various Type of Addressing ModeDocument3 pagesVarious Type of Addressing ModeRajalakshmi PNo ratings yet
- Fundamentals of Computer Organization and Digital ElectronicsDocument93 pagesFundamentals of Computer Organization and Digital ElectronicsGogNo ratings yet
- Chapter 3Document48 pagesChapter 3Aman Ethio LijNo ratings yet
- Unit-2 Part-1: Basic Computer Organization and Design: ContentsDocument20 pagesUnit-2 Part-1: Basic Computer Organization and Design: ContentsSeid DeguNo ratings yet
- COA-Unit-II-part-1Document20 pagesCOA-Unit-II-part-1asmitNo ratings yet
- Introduction of Stack Based CPU Organization: Processer DesignDocument15 pagesIntroduction of Stack Based CPU Organization: Processer DesignlalitNo ratings yet
- 10 - Processor Structure and FunctionDocument45 pages10 - Processor Structure and FunctionAbdukadir AbdullahNo ratings yet
- Unit-4 CoaDocument17 pagesUnit-4 CoaArun KrishNo ratings yet
- Group 6 Cpu Design PresentationDocument50 pagesGroup 6 Cpu Design PresentationFerry AriNo ratings yet
- 01 Introduction To The Microprocessor and Computer The Microprocessor and Its ArchitectureDocument15 pages01 Introduction To The Microprocessor and Computer The Microprocessor and Its ArchitectureRam AnandNo ratings yet
- Coa 5Document37 pagesCoa 5pahujahimankNo ratings yet
- Computer Organization and Architecture: Chapter FourDocument43 pagesComputer Organization and Architecture: Chapter FourZerihun BekeleNo ratings yet
- Assembly Language Fundamentals and Protected Mode MultitaskingDocument23 pagesAssembly Language Fundamentals and Protected Mode MultitaskingMutahhir Khan100% (1)
- Chapter 5 Basic Computer Organization and DesignDocument25 pagesChapter 5 Basic Computer Organization and Designamanterefe99No ratings yet
- Coa LMRDocument11 pagesCoa LMRff8005636No ratings yet
- Central Processing Unit: EditionDocument10 pagesCentral Processing Unit: Editioncadetjalal9No ratings yet
- Cpu Design 1Document12 pagesCpu Design 1Parth ChauhanNo ratings yet
- Basic Computer Organisation and DesignDocument30 pagesBasic Computer Organisation and DesignLakshya VermaNo ratings yet
- COA_I_Unit_QADocument9 pagesCOA_I_Unit_QAdineshgandrakotiNo ratings yet
- Module 2 CoaDocument13 pagesModule 2 CoacabbywarzoneNo ratings yet
- Addressing Modes GuideDocument4 pagesAddressing Modes GuideMesay NebelbalNo ratings yet
- Dpco Unit 3Document16 pagesDpco Unit 3pl.babyshalini palanisamyNo ratings yet
- COM AssignmentDocument27 pagesCOM AssignmentsunnybaggaNo ratings yet
- 8086 Microprocessor RajDocument86 pages8086 Microprocessor RajVenkata Rajkumar ChNo ratings yet
- Basic Computer OrganizationDocument20 pagesBasic Computer OrganizationMag Creation100% (1)
- Co RegDocument8 pagesCo Regaryan.shivam.10No ratings yet
- Co 3Document29 pagesCo 3Gautam ChhabraNo ratings yet
- Basic Computer OrganizationDocument23 pagesBasic Computer OrganizationKibrom HaftuNo ratings yet
- ARM 4 Part2Document9 pagesARM 4 Part2SUGYAN ANAND MAHARANANo ratings yet
- Chapter 3CEDocument19 pagesChapter 3CEMohammedNo ratings yet
- ES Assignment 3Document12 pagesES Assignment 3satinder singhNo ratings yet
- Organisation of CompDocument7 pagesOrganisation of CompAditya KumarNo ratings yet
- Lec 03 Internal Micro ArchitectureDocument24 pagesLec 03 Internal Micro ArchitecturePaarth JamwalNo ratings yet
- Midterm CADocument5 pagesMidterm CAKashan AhmedNo ratings yet
- Lecture Note 292311150242100Document101 pagesLecture Note 292311150242100ETCi-101Monalisa RayNo ratings yet
- Answer of Q.2: Figure 1: A Generic ALU That Has 2 Inputs and 1 OutputDocument12 pagesAnswer of Q.2: Figure 1: A Generic ALU That Has 2 Inputs and 1 OutputAmit JainNo ratings yet
- Coa HW2Document6 pagesCoa HW2Mohammed AyadNo ratings yet
- Chapter 4Document71 pagesChapter 4Yididiya TilahunNo ratings yet
- II BSC Computer ArchitectureDocument76 pagesII BSC Computer ArchitectureSukanyaNo ratings yet
- Addressing Modes in Computer OrganizationDocument8 pagesAddressing Modes in Computer OrganizationArchana R gopinathNo ratings yet
- Sodapdf-Mazher 4Document6 pagesSodapdf-Mazher 4Mohammed Mazher40No ratings yet
- Microprocessors - III: Yashar HajiyevDocument83 pagesMicroprocessors - III: Yashar HajiyevMurad QəhramanovNo ratings yet
- Architecture of TMS320C54XX Digital Signal ProcessorsDocument20 pagesArchitecture of TMS320C54XX Digital Signal ProcessorsLydia Elezabeth Alappat100% (7)
- Unit 2Document60 pagesUnit 2Ashish kumarNo ratings yet
- Microprocessor & Interfacing Page 1Document56 pagesMicroprocessor & Interfacing Page 1Archana TiwariNo ratings yet
- Coa AssignmentDocument14 pagesCoa AssignmentsunnybaggaNo ratings yet
- Microprocessor FundamentalsDocument14 pagesMicroprocessor Fundamentalssenthilkumarm50No ratings yet
- Part 2Document41 pagesPart 2ah chongNo ratings yet
- Morris ManoDocument29 pagesMorris Manojupillisjohn_9650432100% (4)
- Implementation of A 16-Bit RISC Processor Using FPGA ProgrammingDocument25 pagesImplementation of A 16-Bit RISC Processor Using FPGA ProgrammingTejashree100% (3)
- Addressing Modes ExplainedDocument4 pagesAddressing Modes ExplainedAshutosh DubeyNo ratings yet
- Computer Architecture 2 MarksDocument32 pagesComputer Architecture 2 MarksArchanavgs0% (1)
- Unit 5 PDFDocument21 pagesUnit 5 PDFShifanilaNo ratings yet
- Unit - Iii 3.0) Introduction: Digital Logic and Computer OrganizationDocument34 pagesUnit - Iii 3.0) Introduction: Digital Logic and Computer OrganizationJit AggNo ratings yet
- Unit 3Document55 pagesUnit 3ladukhushi09No ratings yet
- Lecture 15 - Addressing ModesDocument4 pagesLecture 15 - Addressing ModesPragya SinghNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Design of A Low Power Dynamic Comparator in 180nm CMOS TechnologyDocument6 pagesDesign of A Low Power Dynamic Comparator in 180nm CMOS TechnologyVishnu VardhanNo ratings yet
- Vlsi DocumentDocument100 pagesVlsi Documentbaburao_kodavatiNo ratings yet
- Micro-operations and register transfersDocument2 pagesMicro-operations and register transfersugiyf eu6e6uNo ratings yet
- Ch341a Programmer 2.2.0.0 Devices Count 1393Document9 pagesCh341a Programmer 2.2.0.0 Devices Count 1393OlambaNo ratings yet
- AR101 Week 6 Data Transfer InstructionsDocument25 pagesAR101 Week 6 Data Transfer InstructionsCaptain KenthNo ratings yet
- PIC2Document85 pagesPIC2John LeungNo ratings yet
- Computer Organization and Assembly Language: Lecture 11 & 12 Instruction Sets: Characteristics and FunctionsDocument17 pagesComputer Organization and Assembly Language: Lecture 11 & 12 Instruction Sets: Characteristics and Functionsdarwinvargas2011No ratings yet
- Lecture 3 Unit 1 Introduction To Microcomputer SystemsDocument8 pagesLecture 3 Unit 1 Introduction To Microcomputer SystemsvinitkumarNo ratings yet
- FPGA PresentationDocument57 pagesFPGA PresentationPanku RangareeNo ratings yet
- 128-Megabit 2.7-Volt Dual-Interface Dataflash At45Db1282 PreliminaryDocument35 pages128-Megabit 2.7-Volt Dual-Interface Dataflash At45Db1282 PreliminarymhasansharifiNo ratings yet
- Best Motherboard 2021Document5 pagesBest Motherboard 2021Kamran KhanNo ratings yet
- Lecture 1Document25 pagesLecture 1ronak.karmakarNo ratings yet
- General Purpose Programmable Peripheral DevicesDocument33 pagesGeneral Purpose Programmable Peripheral DevicesSudarshanBhardwajNo ratings yet
- Tutorial 6 - Part 2 SolutionDocument2 pagesTutorial 6 - Part 2 Solutionamit_coolbuddy20No ratings yet
- Architecture of 8086 Microprocessor Explained in 40 CharactersDocument3 pagesArchitecture of 8086 Microprocessor Explained in 40 CharactersAdaikkal U Kumar100% (2)
- Chapter 2: 8051 Assembly Language Programming: - Microcontroller'sDocument19 pagesChapter 2: 8051 Assembly Language Programming: - Microcontroller'sIsmailNo ratings yet
- Static CMOS Design Techniques for Low Power and High PerformanceDocument22 pagesStatic CMOS Design Techniques for Low Power and High PerformanceDebela TesfayeNo ratings yet
- Basic Structure and Functional Units of ComputersDocument46 pagesBasic Structure and Functional Units of ComputersTameem AhmedNo ratings yet
- Chapter 1 Solutions: Case Study 1: Chip Fabrication CostDocument142 pagesChapter 1 Solutions: Case Study 1: Chip Fabrication CostSaloni RakholiyaNo ratings yet
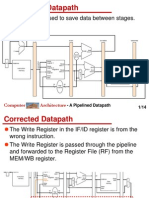
- A Pipelined Datapath: Resisters Are Used To Save Data Between StagesDocument14 pagesA Pipelined Datapath: Resisters Are Used To Save Data Between StagesJohnDaGRTNo ratings yet
- MOSIS Scalable CMOS Design RulesDocument1 pageMOSIS Scalable CMOS Design RulesCarlos SaavedraNo ratings yet
- Supermicro Motherboard x9DAi Quick ReferenceDocument1 pageSupermicro Motherboard x9DAi Quick ReferenceJeff hNo ratings yet
- تجميعات المعالجات1Document104 pagesتجميعات المعالجات1GaNo ratings yet
- Tutorial Module 4Document9 pagesTutorial Module 4Neupane Er KrishnaNo ratings yet
- 8086 Microprocessor Cheatsheet GuideDocument17 pages8086 Microprocessor Cheatsheet Guidedz15dzNo ratings yet
- Module5 1-DataTransferArithmeticInstDocument55 pagesModule5 1-DataTransferArithmeticInstAkademiko HelperNo ratings yet
- PIC TIMER PROGRAMMING IN C: TIMER MODES AND TIME DELAYSDocument30 pagesPIC TIMER PROGRAMMING IN C: TIMER MODES AND TIME DELAYSkeerthana murugeswaranNo ratings yet
- 8051 QuestionDocument9 pages8051 QuestionJai Singh MauryaNo ratings yet
- Vlsi NotesDocument9 pagesVlsi NotesVipin RajputNo ratings yet
- Qualified Memory Modules List for Matisse CPUsDocument8 pagesQualified Memory Modules List for Matisse CPUsalpa kijiroNo ratings yet