You might also like
- Junguian PsychotherapyDocument194 pagesJunguian PsychotherapyRene Galvan Heim100% (13)
- CanbuswiringforDSEcontrollers (Motores Eletrônicos)Document34 pagesCanbuswiringforDSEcontrollers (Motores Eletrônicos)Gustavo PereiraNo ratings yet
- F2 IS Exam 1 (15-16)Document10 pagesF2 IS Exam 1 (15-16)羅天佑No ratings yet
- Hirschmann Ethernet GuideDocument100 pagesHirschmann Ethernet Guidepeterholiday100% (3)
- (Culture and History of The Ancient Near East 65) Leslie Anne Warden - Pottery and Economy in Old Kingdom Egypt-Brill Academic Publishers (2014)Document343 pages(Culture and History of The Ancient Near East 65) Leslie Anne Warden - Pottery and Economy in Old Kingdom Egypt-Brill Academic Publishers (2014)HugoBotello100% (1)
- Sliding Sleeves Catalog Evolution Oil ToolsDocument35 pagesSliding Sleeves Catalog Evolution Oil ToolsEvolution Oil Tools100% (1)
- Low Voltage CMOS SAR ADC DesignDocument68 pagesLow Voltage CMOS SAR ADC DesignAyush SukaniNo ratings yet
- Ami ManDocument78 pagesAmi ManGuillermo RamirezNo ratings yet
- Carbon Emission and Battery Monitoring SystemDocument17 pagesCarbon Emission and Battery Monitoring SystemIJRASETPublicationsNo ratings yet
- Fifesonywp - en USDocument22 pagesFifesonywp - en UStheimagingsourceNo ratings yet
- Point Grey Grasshopper DatasheetDocument2 pagesPoint Grey Grasshopper Datasheetjohn645270No ratings yet
- IEEE 1394 FireWire For Industrial Cameras PDFDocument7 pagesIEEE 1394 FireWire For Industrial Cameras PDFFaraz ElectronicNo ratings yet
- Camera Link SpecificationDocument34 pagesCamera Link Specificationmohitmangal84No ratings yet
- Lan8700 PDFDocument83 pagesLan8700 PDFsaberNo ratings yet
- ATM Pico NodeB PDFDocument2 pagesATM Pico NodeB PDFRenn CruzNo ratings yet
- LAN8700/LAN8700 IDocument74 pagesLAN8700/LAN8700 Ivaibhav savajadiyaNo ratings yet
- NI Tutorial 2808 enDocument4 pagesNI Tutorial 2808 enharjanto_utomoNo ratings yet
- Basic Serial EEPROM OperationDocument15 pagesBasic Serial EEPROM OperationVu LeNo ratings yet
- EEprom Serial 1Document16 pagesEEprom Serial 1macepaNo ratings yet
- Telematics Data SheetDocument2 pagesTelematics Data Sheetwqd dqwdwdNo ratings yet
- HW FunctionalityDocument35 pagesHW FunctionalityBeto MurguiaNo ratings yet
- User's Guide: 100/10M PCI Adapter & 100/10M Wake On LAN PCI AdapterDocument7 pagesUser's Guide: 100/10M PCI Adapter & 100/10M Wake On LAN PCI AdapterIrina IovanelNo ratings yet
- nanoBTS 1800-1900Document2 pagesnanoBTS 1800-1900merrion123No ratings yet
- As I TutorialDocument20 pagesAs I TutorialadrianLion2No ratings yet
- Fms PinzaDocument2 pagesFms Pinzaomar delgadoNo ratings yet
- A Brief Introduction To Controller Area NetworkDocument6 pagesA Brief Introduction To Controller Area NetworkSergio FinkNo ratings yet
- 5992-1205EN Impedance Analyzers and Vector Network Analyzers Optimizing Connections Using USB and LAN Interfaces (Jan 2018)Document9 pages5992-1205EN Impedance Analyzers and Vector Network Analyzers Optimizing Connections Using USB and LAN Interfaces (Jan 2018)郑登宇No ratings yet
- 9500 MPR Release 1.3 Technical Description: V. 3.0 - June 2009Document21 pages9500 MPR Release 1.3 Technical Description: V. 3.0 - June 2009Ahmed AliNo ratings yet
- Dax RouterDocument356 pagesDax RouterfsstkkNo ratings yet
- Automatic Resistance Detection and Abrasion Testing of Copper Wire Used in Transformer or Motor Windings by ARM 7 ProcessorDocument4 pagesAutomatic Resistance Detection and Abrasion Testing of Copper Wire Used in Transformer or Motor Windings by ARM 7 ProcessorInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- MAX9273 22-Bit GMSL Serializer With Coax or STP Cable Drive: General Description Benefits and FeaturesDocument49 pagesMAX9273 22-Bit GMSL Serializer With Coax or STP Cable Drive: General Description Benefits and FeaturesRamachandra_CNo ratings yet
- All-In-One Field Tester For Fixed and Mobile Networks: Product Overview BrochureDocument20 pagesAll-In-One Field Tester For Fixed and Mobile Networks: Product Overview BrochureIbrahim MaihoubNo ratings yet
- Industrial Fiber - AV00-0269EN - 051818 PDFDocument12 pagesIndustrial Fiber - AV00-0269EN - 051818 PDFmarioNo ratings yet
- Interfacing The Serial / RS232 Port: Part 1: Hardware (PC'S)Document40 pagesInterfacing The Serial / RS232 Port: Part 1: Hardware (PC'S)MAENo ratings yet
- AS-interface Simple, Robust, Device-Level BusDocument20 pagesAS-interface Simple, Robust, Device-Level BusmdarwishbpNo ratings yet
- Tiducb 9Document55 pagesTiducb 9aaroh vishnoiNo ratings yet
- Telematics Data SheetDocument2 pagesTelematics Data SheetFelix Alberto Acevedo AvalNo ratings yet
- Forval Modems Offer High-Speed Options Up to 19.2 KbpsDocument5 pagesForval Modems Offer High-Speed Options Up to 19.2 KbpsdyfhgfxjNo ratings yet
- SIM7000X-PCIE Series SPEC 20220210Document3 pagesSIM7000X-PCIE Series SPEC 20220210bflizardoNo ratings yet
- Metronode Spec SheetDocument5 pagesMetronode Spec SheetemcviltNo ratings yet
- COMP-AC A p01 - 13Document13 pagesCOMP-AC A p01 - 13Anderson SejasNo ratings yet
- INVT DA200 Servo CatalogDocument24 pagesINVT DA200 Servo Catalogsteve yamamotoNo ratings yet
- NI Tutorial 2895 enDocument3 pagesNI Tutorial 2895 enalibob78No ratings yet
- A Brief Introduction To Controller Area Network PDFDocument6 pagesA Brief Introduction To Controller Area Network PDFSivaNo ratings yet
- Apple Iphone 6s A1688 Smartphone Chipworks Teardown Report BPT-1509-801 With CommentaryDocument68 pagesApple Iphone 6s A1688 Smartphone Chipworks Teardown Report BPT-1509-801 With Commentarysiev29No ratings yet
- A Brief Introduction To Controller Area Network PDFDocument6 pagesA Brief Introduction To Controller Area Network PDFSiva100% (1)
- Anexo ACaracteristicas Tecnicas de Los EquiposDocument18 pagesAnexo ACaracteristicas Tecnicas de Los EquiposAlvaroZolaNo ratings yet
- Moxa PDFDocument6 pagesMoxa PDFksenthil77No ratings yet
- Microchip 280317 KSZ9031MNX-ScrdDocument73 pagesMicrochip 280317 KSZ9031MNX-ScrdJonathan WuNo ratings yet
- LAN8720A/LAN8720Ai: Small Footprint RMII 10/100 Ethernet Transceiver With HP Auto-MDIX SupportDocument79 pagesLAN8720A/LAN8720Ai: Small Footprint RMII 10/100 Ethernet Transceiver With HP Auto-MDIX Supportapi-432313169No ratings yet
- Ib Thg520 Dhg525rev2 GBDocument41 pagesIb Thg520 Dhg525rev2 GBOvidiu DamianNo ratings yet
- Etdp Tigers Mannheim 2018Document12 pagesEtdp Tigers Mannheim 2018ChefiaNo ratings yet
- 16/8 Ch. 14-bit 500 MS/s Digitizer FamilyDocument2 pages16/8 Ch. 14-bit 500 MS/s Digitizer FamilyJairo GonzálezNo ratings yet
- Price List: Fourstar Electronic Technology Co., Ltd. Deyang ChinaDocument30 pagesPrice List: Fourstar Electronic Technology Co., Ltd. Deyang ChinaSanjeev JangraNo ratings yet
- Price List: Fourstar Electronic Technology Co., Ltd. Deyang ChinaDocument30 pagesPrice List: Fourstar Electronic Technology Co., Ltd. Deyang ChinaSanjeev JangraNo ratings yet
- Fourstar Electronic Technology Co Product Price ListDocument30 pagesFourstar Electronic Technology Co Product Price ListSanjeev JangraNo ratings yet
- Price List: Fourstar Electronic Technology Co., Ltd. Deyang ChinaDocument30 pagesPrice List: Fourstar Electronic Technology Co., Ltd. Deyang ChinaAnand BagadeNo ratings yet
- Price List: Fourstar Electronic Technology Co., Ltd. Deyang ChinaDocument30 pagesPrice List: Fourstar Electronic Technology Co., Ltd. Deyang ChinaSanjeev JangraNo ratings yet
- Price List: Fourstar Electronic Technology Co., Ltd. Deyang ChinaDocument30 pagesPrice List: Fourstar Electronic Technology Co., Ltd. Deyang ChinaSanjeev JangraNo ratings yet
- The RF Reader ADIDocument88 pagesThe RF Reader ADIyuri_bvNo ratings yet
- Wiring Diagram: Samsung Electronics 9-1Document2 pagesWiring Diagram: Samsung Electronics 9-1Nei Vinicius Hercules Rodrigues MirandaNo ratings yet
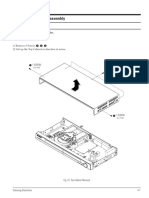
- 06 - Disassembly & ReassemblyDocument6 pages06 - Disassembly & ReassemblyNei Vinicius Hercules Rodrigues MirandaNo ratings yet
- Block Diagrams: This Document Can Not Be Used Without Samsung's Authorization. Samsung Electronics 8-1Document8 pagesBlock Diagrams: This Document Can Not Be Used Without Samsung's Authorization. Samsung Electronics 8-1Nei Vinicius Hercules Rodrigues MirandaNo ratings yet
- Troubleshooting: NO Power Detected (Stand by LED OFF)Document16 pagesTroubleshooting: NO Power Detected (Stand by LED OFF)Nei Vinicius Hercules Rodrigues MirandaNo ratings yet
- 01 CoverDocument1 page01 CoverNei Vinicius Hercules Rodrigues MirandaNo ratings yet
- 15 Software UpdateDocument4 pages15 Software UpdateNei Vinicius Hercules Rodrigues MirandaNo ratings yet
- ECOSYS M2030dn M2530dn M2035dn M2535dn SM UKDocument273 pagesECOSYS M2030dn M2530dn M2035dn M2535dn SM UKMaks Prost60% (5)
- Albert Einstein - Wikipedia, The Free EncyclopediaDocument34 pagesAlbert Einstein - Wikipedia, The Free EncyclopediaalhanunNo ratings yet
- SD Series Digital AC Servo System User Manual GuideDocument66 pagesSD Series Digital AC Servo System User Manual GuideAdnene SaanounNo ratings yet
- Vocabulary Practice 1Document3 pagesVocabulary Practice 1Phuong AnhNo ratings yet
- Modigliani MillerDocument12 pagesModigliani MillerAlvaro CamañoNo ratings yet
- Compiler Design and Linux System AdministrationDocument47 pagesCompiler Design and Linux System AdministrationGouri ShankerNo ratings yet
- Filipino Nationalism LessonDocument24 pagesFilipino Nationalism LessonIan Jay TumulakNo ratings yet
- Scotts S2048 S2554 Operators ManualDocument99 pagesScotts S2048 S2554 Operators ManualobixmtNo ratings yet
- How To Critique A Photograph - Facebook PDFDocument1 pageHow To Critique A Photograph - Facebook PDFpeterNo ratings yet
- Clone CDDocument2 pagesClone CDavk.oracleNo ratings yet
- New Ss 8 OutlineDocument3 pagesNew Ss 8 Outlineapi-251874206No ratings yet
- Integrated Marketing Communication PlanDocument5 pagesIntegrated Marketing Communication Planprojectwork185No ratings yet
- Man 400eDocument324 pagesMan 400eLopez Tonny100% (1)
- S1.4.5.) Datasheet PRESSURE GAUGEDocument3 pagesS1.4.5.) Datasheet PRESSURE GAUGEEkoNo ratings yet
- MMC Fiori Cheat Sheet PDFDocument2 pagesMMC Fiori Cheat Sheet PDFAleksandar KNo ratings yet
- Signals and Systems Analysis: NET 351 Instructor: Dr. Amer El-Khairy يريخلا &رماع .دDocument44 pagesSignals and Systems Analysis: NET 351 Instructor: Dr. Amer El-Khairy يريخلا &رماع .دمصعب جاسمNo ratings yet
- 1675.does Concrete Lighten or Change Color As It DriesDocument5 pages1675.does Concrete Lighten or Change Color As It DriestvrNo ratings yet
- HL-1060 User, Parts, and Service Manual 02Document6 pagesHL-1060 User, Parts, and Service Manual 02วรพงษ์ กอชัชวาลNo ratings yet
- OlayDocument36 pagesOlayrachit.chaudharyNo ratings yet
- Multicolor Fluorochrome Laser Chart PDFDocument1 pageMulticolor Fluorochrome Laser Chart PDFSathish KumarNo ratings yet
- Segmentation: NIVEA Sun Case Study Summary Downloaded From The Times 100 Edition 11Document2 pagesSegmentation: NIVEA Sun Case Study Summary Downloaded From The Times 100 Edition 11Boon-Pin NgNo ratings yet
- IM PS Fashion-Business-Digital-Communication-And-Media 3Y Course Pathway MI 04Document7 pagesIM PS Fashion-Business-Digital-Communication-And-Media 3Y Course Pathway MI 04oliwia bujalskaNo ratings yet
- Analisis Kinerja Turbin Uap Unit 3 BerdasarkanDocument12 pagesAnalisis Kinerja Turbin Uap Unit 3 BerdasarkanfebriansyahNo ratings yet
- F 83179Document6 pagesF 83179pcmfilhoNo ratings yet
- Swype ReportDocument8 pagesSwype ReportNagarjuna ReddyNo ratings yet