You might also like
- Ebook PDF Landmarks in Humanities 5th EditionDocument61 pagesEbook PDF Landmarks in Humanities 5th Editionina.mccrea979100% (53)
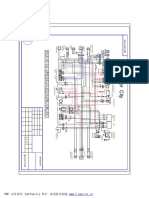
- Cpi Oliver City EldiagramDocument1 pageCpi Oliver City EldiagramHenry BraunNo ratings yet
- Engineering Specification: ESFU5A-8079-AADocument5 pagesEngineering Specification: ESFU5A-8079-AAjavier ortizNo ratings yet
- Cooling Water Treatment PDFDocument2 pagesCooling Water Treatment PDFvjNo ratings yet
- O A: T T O G M A C T: Ne For LL Owards Raining NE Raph Odel For LL Lassification AsksDocument22 pagesO A: T T O G M A C T: Ne For LL Owards Raining NE Raph Odel For LL Lassification AsksPratzoholNo ratings yet
- O A: T T O G M A C T: Ne For LL Owards Raining NE Raph Odel For LL Lassification AsksDocument23 pagesO A: T T O G M A C T: Ne For LL Owards Raining NE Raph Odel For LL Lassification Askszlixin701No ratings yet
- Paper 2Document19 pagesPaper 2Pritesh SuroliaNo ratings yet
- VIMA - General Robot Manipulation With Multimodal PromptsDocument48 pagesVIMA - General Robot Manipulation With Multimodal Promptselisio.silvaNo ratings yet
- Learning Multiple Visual Domains With Residual AdaptersDocument11 pagesLearning Multiple Visual Domains With Residual AdaptersYe DuNo ratings yet
- NN TextClassificationDocument7 pagesNN TextClassificationDian PuspitaNo ratings yet
- Transfer Learning Using VGG-16 With Deep ConvolutiDocument9 pagesTransfer Learning Using VGG-16 With Deep ConvolutimiguelNo ratings yet
- Siamese Neural Networks For One-Shot Image RecognitionDocument8 pagesSiamese Neural Networks For One-Shot Image Recognitionabyasingh04No ratings yet
- Socratic Models ML AI LM 2204.00598Document20 pagesSocratic Models ML AI LM 2204.00598michetraviNo ratings yet
- Transfer Learning Using VGG-16 With Deep ConvolutiDocument9 pagesTransfer Learning Using VGG-16 With Deep ConvolutiMistlemagicNo ratings yet
- Deep MIML NetworkDocument7 pagesDeep MIML NetworkSier TskianNo ratings yet
- Embedded-Model Flows Combining The Inductive BiaseDocument22 pagesEmbedded-Model Flows Combining The Inductive Biasejacksonns.brNo ratings yet
- 5-Object Oriented ProgrammingDocument148 pages5-Object Oriented ProgrammingBabul PratapNo ratings yet
- TURL: Table Understanding Through Representation Learning: Xiang Deng Huan Sun Alyssa LeesDocument14 pagesTURL: Table Understanding Through Representation Learning: Xiang Deng Huan Sun Alyssa Leesaegr82No ratings yet
- Recurrent Neural Network For Text Classification With Multi-Task LearningDocument7 pagesRecurrent Neural Network For Text Classification With Multi-Task LearningBassel GhaybourNo ratings yet
- Cs 2 PDFDocument4 pagesCs 2 PDFHarsimran KapoorNo ratings yet
- Deep Learning Computers TodayDocument13 pagesDeep Learning Computers TodaybobNo ratings yet
- Lack of Generatlisation Transformers. Yadlowsky Et Al. 2023. Google. 2311.00871Document13 pagesLack of Generatlisation Transformers. Yadlowsky Et Al. 2023. Google. 2311.00871djame seddahNo ratings yet
- Object Oriented Programming With C - Ug1Document92 pagesObject Oriented Programming With C - Ug1velmuruganNo ratings yet
- WizardLM - Empowering Large Language Models To Follow Complex InstructionsDocument39 pagesWizardLM - Empowering Large Language Models To Follow Complex InstructionswilhelmjungNo ratings yet
- Prompt Distribution LearningDocument13 pagesPrompt Distribution LearningreghecampflucaNo ratings yet
- Coupling and Cohesion in OOPDocument1 pageCoupling and Cohesion in OOPabouananeNo ratings yet
- Fast Inference and Learning For Modeling Documents With A Deep Boltzmann MachineDocument7 pagesFast Inference and Learning For Modeling Documents With A Deep Boltzmann Machinefabiohh90No ratings yet
- The Basics - Four Pillars of Object Oriented Programming: 1. AbstractionDocument1 pageThe Basics - Four Pillars of Object Oriented Programming: 1. AbstractionReymart NachorNo ratings yet
- Where Are We in Embedding Spaces? A Comprehensive Analysis On Network Embedding Approaches For Recommender SystemsDocument9 pagesWhere Are We in Embedding Spaces? A Comprehensive Analysis On Network Embedding Approaches For Recommender SystemsData LOG NGUYENNo ratings yet
- 4.1 - Unsupervised Visual Representation Learning by Context PredictionDocument10 pages4.1 - Unsupervised Visual Representation Learning by Context Predictionfarzad imanpourNo ratings yet
- XAI P T A Brief Review of ExplainableDocument9 pagesXAI P T A Brief Review of Explainableghrab MedNo ratings yet
- Person Re-Identification by Deep Joint Learning ofDocument8 pagesPerson Re-Identification by Deep Joint Learning ofVõ Minh TríNo ratings yet
- Semisupervised Autoencoder For Sentiment Analysis12059-55631-1-PBDocument7 pagesSemisupervised Autoencoder For Sentiment Analysis12059-55631-1-PBPhamThi ThietNo ratings yet
- Distilling Kowledge by Mimicking FeaturesDocument16 pagesDistilling Kowledge by Mimicking FeaturesGaurav HarjuleNo ratings yet
- Tructured Ttention Etworks: (Yoonkim@seas, Carldenton@college, Lhoang@g, Srush@seas) .Harvard - EduDocument21 pagesTructured Ttention Etworks: (Yoonkim@seas, Carldenton@college, Lhoang@g, Srush@seas) .Harvard - EduMehrshad GhasemabadiNo ratings yet
- Cutting Down On Prompts and Parameters: Simple Few-Shot Learning With Language ModelsDocument12 pagesCutting Down On Prompts and Parameters: Simple Few-Shot Learning With Language Modelswalter huNo ratings yet
- Iclr2023-Prompt Learning With Optimal TDocument18 pagesIclr2023-Prompt Learning With Optimal T郭妙恬No ratings yet
- 2016-Revisiting Semi-Supervised Learning With Graph EmbeddingsDocument9 pages2016-Revisiting Semi-Supervised Learning With Graph EmbeddingsHedy LiuNo ratings yet
- Khan Introducing Language Guidance in Prompt-Based Continual Learning ICCV 2023 PaperDocument11 pagesKhan Introducing Language Guidance in Prompt-Based Continual Learning ICCV 2023 PaperreghecampflucaNo ratings yet
- Glam: Fine-Tuning Large Language Models For Domain Knowledge Graph Alignment Via Neighborhood Partitioning and Generative Subgraph EncodingDocument8 pagesGlam: Fine-Tuning Large Language Models For Domain Knowledge Graph Alignment Via Neighborhood Partitioning and Generative Subgraph EncodingJOHNNo ratings yet
- Oriental College of Technology: Ritika MakhijaDocument23 pagesOriental College of Technology: Ritika Makhijaritika makhijaNo ratings yet
- Wu Et Al - 2019 - A Comprehensive Survey On Graph Neural NetworksDocument22 pagesWu Et Al - 2019 - A Comprehensive Survey On Graph Neural NetworksMonicaNo ratings yet
- Classes Versus Prototypes in Object-Oriented LanguagesDocument5 pagesClasses Versus Prototypes in Object-Oriented Languageszsolt kormanyNo ratings yet
- Max-Margin Tensor Neural Network For Chinese Word SegmentationDocument11 pagesMax-Margin Tensor Neural Network For Chinese Word SegmentationafnanmajidNo ratings yet
- Task-Based Moe For Multitask Multilingual Machine TranslationDocument11 pagesTask-Based Moe For Multitask Multilingual Machine TranslationbilletonNo ratings yet
- Neural TuringDocument194 pagesNeural TuringIamINNo ratings yet
- Unit IVDocument63 pagesUnit IVrmn4466No ratings yet
- OOP Concept Programming.Document1 pageOOP Concept Programming.Jenny BatausaNo ratings yet
- Object Counting YoloDocument7 pagesObject Counting YoloHi ManshuNo ratings yet
- Multimodal Chain of Thought Reasoning in Language ModelsDocument19 pagesMultimodal Chain of Thought Reasoning in Language ModelsBlerim HasaNo ratings yet
- Ascertaining Important Features of The JAPROSIM Simulation LibraryDocument8 pagesAscertaining Important Features of The JAPROSIM Simulation LibraryAlka AgarwalNo ratings yet
- HUSE Multi Input Deep Learning ModelDocument10 pagesHUSE Multi Input Deep Learning ModelLast AbNo ratings yet
- Context Aware Document Embedding: Lau and Baldwin 2016 Le and Mikolov 2014Document8 pagesContext Aware Document Embedding: Lau and Baldwin 2016 Le and Mikolov 2014Yoann DragneelNo ratings yet
- Chapter 1 PDFDocument4 pagesChapter 1 PDFIrfan AhmedNo ratings yet
- Dynamic Fusion Network For Multi-Domain End-To-End Task-Oriented DialogDocument11 pagesDynamic Fusion Network For Multi-Domain End-To-End Task-Oriented DialogMuhammad Fhadli SullivanNo ratings yet
- Zhou Learning Deep Features CVPR 2016 Paper PDFDocument9 pagesZhou Learning Deep Features CVPR 2016 Paper PDFricksant2003No ratings yet
- Parameter-Efficient Sparsity Crafting From Dense To Mixture-Of-Experts For Instruction Tuning On General TasksDocument13 pagesParameter-Efficient Sparsity Crafting From Dense To Mixture-Of-Experts For Instruction Tuning On General TasksKayky RamosNo ratings yet
- An Inter-Classes Obfuscation Method For Java ProgramDocument6 pagesAn Inter-Classes Obfuscation Method For Java ProgramPrajwal AtramNo ratings yet
- Semantic-Guided Selective Representation For ImageDocument10 pagesSemantic-Guided Selective Representation For ImageTomislav IvandicNo ratings yet
- Xian Latent Embeddings For CVPR 2016 PaperDocument9 pagesXian Latent Embeddings For CVPR 2016 PaperHenri MindjanaNo ratings yet
- Latent Translation: Crossing Modalities by Bridging Generative ModelsDocument16 pagesLatent Translation: Crossing Modalities by Bridging Generative ModelsPhilippe EslingNo ratings yet
- Object Oriented Programming Inheritance: Fundamentals and ApplicationsFrom EverandObject Oriented Programming Inheritance: Fundamentals and ApplicationsNo ratings yet
- Qaballah and Tarot: A Basic Course in Nine Lessons Lesson III-bbDocument50 pagesQaballah and Tarot: A Basic Course in Nine Lessons Lesson III-bbPolaris93100% (1)
- Oxygen Concentrator 7F-5 User's ManualDocument9 pagesOxygen Concentrator 7F-5 User's ManualJunx TripoliNo ratings yet
- 09-S and P Block Elements - Set-Test-Final-EDocument3 pages09-S and P Block Elements - Set-Test-Final-EAbhishek RavirajNo ratings yet
- Onthly Urrent Ffairs: - Sebi Rbi - NabardDocument204 pagesOnthly Urrent Ffairs: - Sebi Rbi - NabardjenniNo ratings yet
- Religious Freedom: Why Now? Defending An Embattled Human RightDocument97 pagesReligious Freedom: Why Now? Defending An Embattled Human RightIslam and Religious Freedom100% (2)
- 145kV GTP BPDBDocument4 pages145kV GTP BPDBJRC TestingNo ratings yet
- BrochureDocument20 pagesBrochuresitaNo ratings yet
- BS en 01793-3-1998 PDFDocument6 pagesBS en 01793-3-1998 PDFNayan jainNo ratings yet
- Phil Precolonial ArtDocument23 pagesPhil Precolonial ArtMonnette Ann Banzuela100% (2)
- 1 - Aqueduct RETROSPECTOSDocument10 pages1 - Aqueduct RETROSPECTOSirving.barrios.vzlaNo ratings yet
- Casio Pathfinder 3070Document15 pagesCasio Pathfinder 3070ebsonccNo ratings yet
- EYE Emergency Manual An Illustrated Guide: Second EditionDocument51 pagesEYE Emergency Manual An Illustrated Guide: Second EditionMin MawNo ratings yet
- Marketing Plan - MattDocument22 pagesMarketing Plan - MattMatt ENo ratings yet
- Unit 4 Notes GDJPDocument2 pagesUnit 4 Notes GDJPAnanth VelNo ratings yet
- IDFT & CONVOLUTIONS - PROBLEMS Part 6Document19 pagesIDFT & CONVOLUTIONS - PROBLEMS Part 6Abishek RajeshNo ratings yet
- CHAPTER 1 The Human Body An OrientationDocument78 pagesCHAPTER 1 The Human Body An OrientationLyndee MayNo ratings yet
- Draka Rs485 1p 24awg Pe SWBDocument2 pagesDraka Rs485 1p 24awg Pe SWBuzair rosdiNo ratings yet
- Stinger 3470Document8 pagesStinger 3470allen_renziNo ratings yet
- NCSS Questions: Lte Ra Pao 3.0Document38 pagesNCSS Questions: Lte Ra Pao 3.0Imran AslamNo ratings yet
- Evap-Lt 60 KV CG ShimaDocument439 pagesEvap-Lt 60 KV CG ShimaDax CasraNo ratings yet
- Ermias TamiruDocument119 pagesErmias TamiruAli HassenNo ratings yet
- More PdfsDocument213 pagesMore PdfsShayan AliNo ratings yet
- 中國成語Document19 pages中國成語Nguyễn HiềnNo ratings yet
- Draft 2Document7 pagesDraft 2api-446158134No ratings yet
- Phontech Ics 6200Document193 pagesPhontech Ics 6200danh voNo ratings yet
- Application: Atlanta DWV Sanitary Pipe IsDocument2 pagesApplication: Atlanta DWV Sanitary Pipe IsBruce DoyaoenNo ratings yet