You might also like
- The Physics BookDocument338 pagesThe Physics BookElena Stanislav100% (34)
- All The Math You Missed - But Need To Know For Graduate SchoolDocument417 pagesAll The Math You Missed - But Need To Know For Graduate Schoolchakrapani2000100% (24)
- How Technology Works by DKDocument258 pagesHow Technology Works by DKchakrapani2000100% (3)
- Automatic Control ExercisesDocument183 pagesAutomatic Control ExercisesFrancesco Vasturzo100% (1)
- 1992 - Meyer - Wavelets Algorithms and ApplicationsDocument133 pages1992 - Meyer - Wavelets Algorithms and ApplicationsAnonymous BZ0l8Qylp100% (1)
- Crack Your Angular Interview PDFDocument67 pagesCrack Your Angular Interview PDFAmir Karacic100% (2)
- Simple Guide To Neural Networks and Deep Learning in Python - HackerEarth BlogDocument24 pagesSimple Guide To Neural Networks and Deep Learning in Python - HackerEarth BlogKshitij AggarwalNo ratings yet
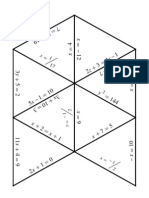
- Algebra1 Review PuzzleDocument3 pagesAlgebra1 Review PuzzleNicholas Yates100% (1)
- 6000 Most Common Korean Words - For All TOPIK Levels PDFDocument232 pages6000 Most Common Korean Words - For All TOPIK Levels PDFZac67% (3)
- Improving Trading Technical Analysis With TensorFlow Long Short-Term Memory (LSTM) Neural NetworkDocument11 pagesImproving Trading Technical Analysis With TensorFlow Long Short-Term Memory (LSTM) Neural NetworkAbdul-Basit Tanvir KhanNo ratings yet
- Time Series Analysis in Python With StatsmodelsDocument8 pagesTime Series Analysis in Python With StatsmodelsChong Hoo ChuahNo ratings yet
- CFD Python The 12 Steps To Navier-Stokes EquationsDocument3 pagesCFD Python The 12 Steps To Navier-Stokes EquationsabhinainNo ratings yet
- Time Series Analysis Using IpythonDocument69 pagesTime Series Analysis Using IpythonKaustubh KeskarNo ratings yet
- Contractor Hse Management ProgramDocument12 pagesContractor Hse Management ProgramAhmed IbrahimNo ratings yet
- Steam Gen: Detection and Classification of Discontinuities Using Discrete Wavelet Transform and MFL TestingDocument10 pagesSteam Gen: Detection and Classification of Discontinuities Using Discrete Wavelet Transform and MFL TestingMangalraj MadasamyNo ratings yet
- Introduction to Machine Learning in the Cloud with Python: Concepts and PracticesFrom EverandIntroduction to Machine Learning in the Cloud with Python: Concepts and PracticesNo ratings yet
- ResumeDocument3 pagesResumeSaharsh MaheshwariNo ratings yet
- Combinatorial Optimization: Alexander SchrijverDocument34 pagesCombinatorial Optimization: Alexander SchrijverWilfredo FelixNo ratings yet
- Time Series Cheat SheetDocument2 pagesTime Series Cheat SheetAshkNo ratings yet
- Christian Gourieroux, Alain Monfort - Time Series and Dynamic Models (Themes in Modern Econometrics) (1996)Document685 pagesChristian Gourieroux, Alain Monfort - Time Series and Dynamic Models (Themes in Modern Econometrics) (1996)HADDOU OUATTARNo ratings yet
- Build Your Own C InterpreterDocument18 pagesBuild Your Own C InterpreterRichard FergusonNo ratings yet
- Algorithmic Trading Using Intelligent AgentsDocument8 pagesAlgorithmic Trading Using Intelligent AgentsRyu UyNo ratings yet
- Reinforcement Learning TutorialDocument17 pagesReinforcement Learning TutorialSagar100% (1)
- POC For SF Cloud MigrationDocument2 pagesPOC For SF Cloud Migrationchakrapani2000No ratings yet
- RNN and LSTM: YANG JianchengDocument15 pagesRNN and LSTM: YANG JianchengseddikNo ratings yet
- Agent Based Simulation of A Financial MarketDocument21 pagesAgent Based Simulation of A Financial Marketmirando93No ratings yet
- Deep Reinforcement Learning Nanodegree Program SyllabusDocument4 pagesDeep Reinforcement Learning Nanodegree Program Syllabusİlkan SüslüNo ratings yet
- LmfitDocument117 pagesLmfitVíctor KNo ratings yet
- DD2431 Machine Learning Lab 4: Reinforcement Learning Python VersionDocument9 pagesDD2431 Machine Learning Lab 4: Reinforcement Learning Python VersionbboyvnNo ratings yet
- Algorithms - Hidden Markov ModelsDocument7 pagesAlgorithms - Hidden Markov ModelsMani NadNo ratings yet
- ConvexOptimization in PythonDocument31 pagesConvexOptimization in PythonSaberNo ratings yet
- BMS Institute of Technology and Management Department of MCADocument10 pagesBMS Institute of Technology and Management Department of MCAGopi Krishna100% (1)
- Atsalakis Et Al. 2011 - Elliott Wave Theory and Neuro-Fuzzy Systems in Stock Market Prediction - The WASP SystemDocument11 pagesAtsalakis Et Al. 2011 - Elliott Wave Theory and Neuro-Fuzzy Systems in Stock Market Prediction - The WASP Systemegonfish100% (1)
- Time Series Forecasting Using Autoarima PythonDocument9 pagesTime Series Forecasting Using Autoarima Pythonante mitarNo ratings yet
- Czekanowski Index-Based Similarity As Alternative Correlation Measure in N-Asset Portfolio AnalysisDocument1 pageCzekanowski Index-Based Similarity As Alternative Correlation Measure in N-Asset Portfolio AnalysisKonrad KonefałNo ratings yet
- Complete Guide To Parameter Tuning in XGBoost (With Codes in Python) PDFDocument20 pagesComplete Guide To Parameter Tuning in XGBoost (With Codes in Python) PDFTeodor von BurgNo ratings yet
- Solution 2Document4 pagesSolution 2fra.public0% (1)
- Travelling Salesman Problem Using Ant Colonization OptimizationDocument13 pagesTravelling Salesman Problem Using Ant Colonization OptimizationwahoNo ratings yet
- Accident Detection Using Convolutional Neural NetworksDocument6 pagesAccident Detection Using Convolutional Neural NetworksNabeel HashimNo ratings yet
- cs229 Notes1 PDFDocument28 pagescs229 Notes1 PDFRichieQCNo ratings yet
- Implementing Graph Neural Networks With TensorFlowDocument5 pagesImplementing Graph Neural Networks With TensorFlowKevin Mendoza PomaNo ratings yet
- R & PythonDocument22 pagesR & PythonPrajesh Kumar PandaNo ratings yet
- Neural Network For SSCV HydrodynamicsDocument104 pagesNeural Network For SSCV Hydrodynamicsvane-16No ratings yet
- Brinson Fachler 1985 Multi Currency PADocument4 pagesBrinson Fachler 1985 Multi Currency PAGeorgi MitovNo ratings yet
- Introduction and The Simple Linear Regression ModelDocument35 pagesIntroduction and The Simple Linear Regression ModelNazmul H. PalashNo ratings yet
- Table of Contents - LatestDocument5 pagesTable of Contents - LatestGaurav ManglaNo ratings yet
- Student Notes Introduction To Digital CommunicationDocument24 pagesStudent Notes Introduction To Digital CommunicationKATRINA DYERNo ratings yet
- Data Analysis ChecklistDocument2 pagesData Analysis ChecklistLuca CameriniNo ratings yet
- Ant Colony - TSP - OptimizationDocument37 pagesAnt Colony - TSP - Optimizationgridtester100% (4)
- How to Design Optimization Algorithms by Applying Natural Behavioral PatternsFrom EverandHow to Design Optimization Algorithms by Applying Natural Behavioral PatternsNo ratings yet
- Introduction To ML Partial 2 PDFDocument54 pagesIntroduction To ML Partial 2 PDFLesocrateNo ratings yet
- OmetricDocument26 pagesOmetricJean-Michel Renders100% (1)
- Parallela Cluster by Michael Johan KrugerDocument56 pagesParallela Cluster by Michael Johan KrugerGiacomo Marco ToigoNo ratings yet
- Localized Feature ExtractionDocument6 pagesLocalized Feature ExtractionsujithaNo ratings yet
- Sound Hack ManualDocument56 pagesSound Hack Manualjandro94No ratings yet
- Building Transformer Models With Attention - Web - PageDocument19 pagesBuilding Transformer Models With Attention - Web - PageAparajita AggarwalNo ratings yet
- AdvancedPython PartI PDFDocument44 pagesAdvancedPython PartI PDFabuobidaNo ratings yet
- Lightgbm Gradient Boosting TreeDocument9 pagesLightgbm Gradient Boosting TreeweaponNo ratings yet
- Python Machine Learning Tutorial With Scikit-LearnDocument16 pagesPython Machine Learning Tutorial With Scikit-LearnSebastián EmdefNo ratings yet
- Optimization With RDocument54 pagesOptimization With RJay100% (1)
- Drishtant Rai Ki DayaDocument24 pagesDrishtant Rai Ki DayaTusharNo ratings yet
- Octave Programming and Linear AlgebraDocument17 pagesOctave Programming and Linear AlgebraVictor MiclovichNo ratings yet
- CSE Syllabus Booklet 4 Yr BTech Revised 060120163 PDFDocument83 pagesCSE Syllabus Booklet 4 Yr BTech Revised 060120163 PDFkappi4uNo ratings yet
- Instrument Automation With Python by Keysight 5992-4268Document15 pagesInstrument Automation With Python by Keysight 5992-4268jigg1777No ratings yet
- Ps and Solution CS229Document55 pagesPs and Solution CS229Anonymous COa5DYzJwNo ratings yet
- C SyntaxDocument14 pagesC SyntaxrishikarthickNo ratings yet
- Time Series Forecasting Using A Hybrid ARIMADocument17 pagesTime Series Forecasting Using A Hybrid ARIMAlocvotuongNo ratings yet
- Understanding LSTM NetworksDocument7 pagesUnderstanding LSTM NetworksZhivko ZhelyazkovNo ratings yet
- Azure CSP DocumntationDocument376 pagesAzure CSP Documntationchakrapani2000No ratings yet
- 1802SupplementaryNotes FullDocument235 pages1802SupplementaryNotes FullCourtney WilliamsNo ratings yet
- UntitledDocument37 pagesUntitledUnknown UserNo ratings yet
- A C Engines and Jet Propulsion1Document16 pagesA C Engines and Jet Propulsion1Mukesh KumarNo ratings yet
- Haberman Data Logistic Regression AnalysisDocument5 pagesHaberman Data Logistic Regression AnalysisEvelynNo ratings yet
- 3-Storeyed 31-3-2015-Schedule PDFDocument1 page3-Storeyed 31-3-2015-Schedule PDFSi Thu AungNo ratings yet
- COCCIMORPHDocument13 pagesCOCCIMORPHmiminNo ratings yet
- 1.rle Rubrics For Case PresentationDocument2 pages1.rle Rubrics For Case PresentationKhristine EstosoNo ratings yet
- Review. Applications of Ecogeography and Geographic Information Systems in Conservation and Utilization of Plant Genetic ResourcesDocument11 pagesReview. Applications of Ecogeography and Geographic Information Systems in Conservation and Utilization of Plant Genetic ResourcesEmilio Patané SpataroNo ratings yet
- Basic Program Structure in C++: Study Guide For Module No. 2Document9 pagesBasic Program Structure in C++: Study Guide For Module No. 2Ji YoungNo ratings yet
- Labour Law Assignment - Gross NegligenceDocument6 pagesLabour Law Assignment - Gross NegligenceOlaotse MoletsaneNo ratings yet
- Staad 4Document37 pagesStaad 4saisssms9116100% (2)
- Original Research PapersDocument13 pagesOriginal Research Papersrikaseo rikaNo ratings yet
- 12.07.20. O&M Manual 41013 - New PLCDocument41 pages12.07.20. O&M Manual 41013 - New PLCFranco Sebastián GenreNo ratings yet
- Detailed Lesson Plan in Mathematics 10 I. ObjectivesDocument4 pagesDetailed Lesson Plan in Mathematics 10 I. ObjectivesLouis Fetilo FabunanNo ratings yet
- Week 8: Spread-Spectrum Modulation - Direct Sequence Spread SpectrumDocument79 pagesWeek 8: Spread-Spectrum Modulation - Direct Sequence Spread SpectrumAmir MustakimNo ratings yet
- Instruction Manual: Slit Lamp Bon SL-EDocument20 pagesInstruction Manual: Slit Lamp Bon SL-EVladimir LevchenkoNo ratings yet
- Chilere - Unitatile de Racire - Technical - Brochures - NX - 0152P - 0812P - EN PDFDocument72 pagesChilere - Unitatile de Racire - Technical - Brochures - NX - 0152P - 0812P - EN PDFDaniel MilosevskiNo ratings yet
- I. You'll Hear A Conversation Between Two People. Listen and Fill in The Blanks (10 PTS) This Is The VOA Special English Agriculture ReportDocument7 pagesI. You'll Hear A Conversation Between Two People. Listen and Fill in The Blanks (10 PTS) This Is The VOA Special English Agriculture ReportTHỌ NGUYỄN VĂNNo ratings yet
- G20 SolutionDocument11 pagesG20 SolutionAbidemi Benjamen AttehNo ratings yet
- Case Study: Medisys Corp The Intense Care Product Development TeamDocument10 pagesCase Study: Medisys Corp The Intense Care Product Development TeamBig BNo ratings yet
- SPECIFIC ENERGY, ENERGY DENSITY OF FUELS and PRIMARY ENERGY SOURCESDocument17 pagesSPECIFIC ENERGY, ENERGY DENSITY OF FUELS and PRIMARY ENERGY SOURCESPranavBalarajuNo ratings yet
- PUP 200 Quizzes 6Document47 pagesPUP 200 Quizzes 6Nam TranNo ratings yet
- Avinash Uttareshwar MeherDocument6 pagesAvinash Uttareshwar MeheravinashNo ratings yet
- One Plan Student 1Document7 pagesOne Plan Student 1api-465826207No ratings yet
- Entropy Equation For A Control VolumeDocument12 pagesEntropy Equation For A Control VolumenirattisaikulNo ratings yet