You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Measures of Position - Calculating Quartiles Using Different MethodsDocument6 pagesMeasures of Position - Calculating Quartiles Using Different Methodssergio paulo esguerraNo ratings yet
- Service Manual KTM Adventure 1190Document226 pagesService Manual KTM Adventure 1190Tim BlockxNo ratings yet
- Collateral Asset DefinitionsDocument116 pagesCollateral Asset Definitionsapi-3748391100% (2)
- Mercruiser 4.3L Mpi SpecsDocument2 pagesMercruiser 4.3L Mpi Specssalvatore dalessandro100% (1)
- The Update of IEC 61400-24 Lightning Protection of Wind TurbinesDocument17 pagesThe Update of IEC 61400-24 Lightning Protection of Wind TurbinesHar HarNo ratings yet
- Egyptian Town PlanningDocument43 pagesEgyptian Town PlanningAbhishek Venkitaraman Iyer96% (23)
- Microeconomics Lecture - Profit Maximization and Competitive SupplyDocument48 pagesMicroeconomics Lecture - Profit Maximization and Competitive Supplybigjanet100% (1)
- Digsilent Powerfactory: Technical Reference DocumentationDocument35 pagesDigsilent Powerfactory: Technical Reference DocumentationHar Har100% (1)
- Transformer TankDocument2 pagesTransformer TankSameeksha Anand100% (3)
- NEPLAN Turbine-Governor ModelsDocument99 pagesNEPLAN Turbine-Governor ModelsRatilal M Jadav100% (1)
- Team Leader WorkbookDocument171 pagesTeam Leader Workbooktousah2010No ratings yet
- TechRef SynchronousMachine PDFDocument35 pagesTechRef SynchronousMachine PDFBaiceanu FlorynNo ratings yet
- TechRef SynchronousMachine PDFDocument35 pagesTechRef SynchronousMachine PDFBaiceanu FlorynNo ratings yet
- International ArbitrageDocument24 pagesInternational Arbitrageaadis191No ratings yet
- TRV Circuit BreakersDocument41 pagesTRV Circuit BreakersrmendozaingNo ratings yet
- Fundamentals of Teleprotection SystemsDocument36 pagesFundamentals of Teleprotection SystemsMohammedSaadaniHassani100% (4)
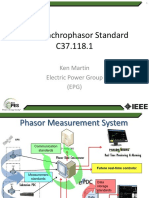
- SynchrophasorStd C37.118.1 KenM 23jan14Document8 pagesSynchrophasorStd C37.118.1 KenM 23jan14Har HarNo ratings yet
- An IEC 61000-4-30 Class A - Power Quality Monitor: Development and Performance AnalysisDocument7 pagesAn IEC 61000-4-30 Class A - Power Quality Monitor: Development and Performance Analysisaoc2000No ratings yet
- Synchrophasorstandardsdevelopment IEEEC37.118IEC61850 90 5Document9 pagesSynchrophasorstandardsdevelopment IEEEC37.118IEC61850 90 5Har HarNo ratings yet
- IEEE C37.118 2 Synchrophasor Communication FrameworkDocument11 pagesIEEE C37.118 2 Synchrophasor Communication FrameworkHar HarNo ratings yet
- Economic Mobility: The Stanford Center On Poverty and InequalityDocument7 pagesEconomic Mobility: The Stanford Center On Poverty and InequalityOliver HinojosaNo ratings yet
- Short-Circuit Current Calculation Application For A.C 3 Phase On Marine and Mobile O Ffshore Installations Based On IEC-61363 StandardDocument8 pagesShort-Circuit Current Calculation Application For A.C 3 Phase On Marine and Mobile O Ffshore Installations Based On IEC-61363 StandardrenegadeNo ratings yet
- Design and Development of A Synchrophasor Measurement Unit As Per IEEE Standard C37.118.1 2011 Saeed Hassan Khan 20151112 1Document15 pagesDesign and Development of A Synchrophasor Measurement Unit As Per IEEE Standard C37.118.1 2011 Saeed Hassan Khan 20151112 1Har HarNo ratings yet
- HITACHI ABB - Shared E-Mobility - The Backbone of Tomorrow's Smart CitiesDocument8 pagesHITACHI ABB - Shared E-Mobility - The Backbone of Tomorrow's Smart CitiesHar HarNo ratings yet
- Dry-Type Air Core Shunt Reactor SpecificationDocument2 pagesDry-Type Air Core Shunt Reactor SpecificationHar HarNo ratings yet
- Showcase your talent and skills at Momentum 2021Document48 pagesShowcase your talent and skills at Momentum 2021Tanishq VermaNo ratings yet
- Primary Storage DevicesDocument2 pagesPrimary Storage DevicesOumotiaNo ratings yet
- Code: Final Exam in English: Grade 8Document7 pagesCode: Final Exam in English: Grade 8Luka EradzeNo ratings yet
- Job DescriptionDocument4 pagesJob Descriptionnafis hasnayenNo ratings yet
- Dryspell+ ManualDocument71 pagesDryspell+ ManualAldo D'AndreaNo ratings yet
- Tds CPD Sika ViscoCrete 2100 Us PDFDocument2 pagesTds CPD Sika ViscoCrete 2100 Us PDFSamirHashimNo ratings yet
- The Making of BuckshotDocument13 pagesThe Making of BuckshotDominicNo ratings yet
- Expert Coaching CatalogDocument37 pagesExpert Coaching CatalogJosh WhiteNo ratings yet
- Seaskills Maritime Academy: Purchase OrderDocument8 pagesSeaskills Maritime Academy: Purchase OrderSELVA GANESHNo ratings yet
- Finite Element and Analytical Modelling of PVC-confined Concrete Columns Under Axial CompressionDocument23 pagesFinite Element and Analytical Modelling of PVC-confined Concrete Columns Under Axial CompressionShaker QaidiNo ratings yet
- GW - Energy Storage Solutions - Brochure-ENDocument24 pagesGW - Energy Storage Solutions - Brochure-ENjhtdtNo ratings yet
- NTSE MAT Maharashtra 2011Document38 pagesNTSE MAT Maharashtra 2011Edward FieldNo ratings yet
- Inorganic Polymers: Classification and PropertiesDocument46 pagesInorganic Polymers: Classification and PropertiesGokul KannanNo ratings yet
- Aluminio 2024-T3Document2 pagesAluminio 2024-T3IbsonhNo ratings yet
- Creo Simulate Components for Stress and Strain QuantitiesDocument1 pageCreo Simulate Components for Stress and Strain QuantitiesSebastiao SilvaNo ratings yet
- Windows 7 Dial-Up Connection Setup GuideDocument7 pagesWindows 7 Dial-Up Connection Setup GuideMikeNo ratings yet
- Roll No. Form No.: Private Admission Form S.S.C. Examination First Annual 2023 9th FRESHDocument3 pagesRoll No. Form No.: Private Admission Form S.S.C. Examination First Annual 2023 9th FRESHBeenish MirzaNo ratings yet
- Chord MethodDocument17 pagesChord MethodJedielson GirardiNo ratings yet
- Literature ReviewDocument2 pagesLiterature ReviewDeepak Jindal67% (3)
- Java Layout ManagersDocument16 pagesJava Layout ManagersVijaya Kumar VadladiNo ratings yet
- LU9245Document2 pagesLU9245mudassir.bukhariNo ratings yet
- Neeraj KumariDocument2 pagesNeeraj KumariThe Cultural CommitteeNo ratings yet