You might also like
- IC 555 TimerDocument11 pagesIC 555 TimersaifaljanahiNo ratings yet
- Install and Configure Essential Services on CentOS 7 ServerDocument48 pagesInstall and Configure Essential Services on CentOS 7 ServerMarina Molina MorenoNo ratings yet
- Specifications For Concrete Construction ACI 301-20: Field Reference ManualDocument6 pagesSpecifications For Concrete Construction ACI 301-20: Field Reference ManualIRFAN NAZIR50% (2)
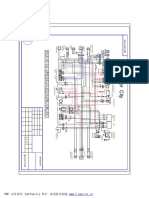
- Cpi Oliver City EldiagramDocument1 pageCpi Oliver City EldiagramHenry BraunNo ratings yet
- DMAIC Methods Tools MapDocument1 pageDMAIC Methods Tools MapDana WilliamsNo ratings yet
- Airline Benchmarking and Performance ImprovementDocument27 pagesAirline Benchmarking and Performance ImprovementJatin ParmarNo ratings yet
- Nonlinear Model & Controller Design For Magnetic Levitation System-IsPRADocument5 pagesNonlinear Model & Controller Design For Magnetic Levitation System-IsPRAIshtiaq AhmadNo ratings yet
- Dieu Khien He Thong Bi Trong Tu TruongDocument5 pagesDieu Khien He Thong Bi Trong Tu TruongNinhĐứcThànhNo ratings yet
- Simulation and Control Design of An Uniaxial Magnetic Levitation SystemDocument6 pagesSimulation and Control Design of An Uniaxial Magnetic Levitation SystemElmer Mamani PretelNo ratings yet
- Modeling and Simulation of Levitating Ball by Electromagnet Using Bond GraphDocument7 pagesModeling and Simulation of Levitating Ball by Electromagnet Using Bond GraphTiago OliveiraNo ratings yet
- Bifurcation chaos camless EMVDocument14 pagesBifurcation chaos camless EMVRené Mboyo KouayepNo ratings yet
- Optimal Control of Electromagnetic Suspension EMS System: Anan SuebsomranDocument8 pagesOptimal Control of Electromagnetic Suspension EMS System: Anan SuebsomranBarkhad MohamedNo ratings yet
- PM Linear ActuatorDocument7 pagesPM Linear ActuatorGthulasi78No ratings yet
- 3 - Joglekar2011Document10 pages3 - Joglekar2011Flávia Gonçalves FernandesNo ratings yet
- Article AMB First PNGDocument31 pagesArticle AMB First PNGFABIEN KENMOGNENo ratings yet
- Synthesis of Control Laws For Magnetic Levitation Systems Based On Serial Invariant ManifoldsDocument10 pagesSynthesis of Control Laws For Magnetic Levitation Systems Based On Serial Invariant ManifoldsIAES International Journal of Robotics and AutomationNo ratings yet
- Comparative Analysis of A Controller For A Magnetic Ball Levitation SystemDocument10 pagesComparative Analysis of A Controller For A Magnetic Ball Levitation SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A New Model of Magnetic Force in Magnetic Levitation SystemsDocument9 pagesA New Model of Magnetic Force in Magnetic Levitation SystemsCamilo Ramirez ANo ratings yet
- Modelling and State Estimation For Control of Magn PDFDocument7 pagesModelling and State Estimation For Control of Magn PDFIshmael AcevedoNo ratings yet
- A Robust Optimal Sliding-Mode Control Approach For Magnetic Levitation SystemsDocument8 pagesA Robust Optimal Sliding-Mode Control Approach For Magnetic Levitation Systemsankurgoel1975No ratings yet
- Mechanical Systems and Signal Processing: Adam Wijata, Krystian Polczyn Ski, Jan AwrejcewiczDocument22 pagesMechanical Systems and Signal Processing: Adam Wijata, Krystian Polczyn Ski, Jan AwrejcewiczGerson CruzNo ratings yet
- Sliding Mode Control For Electromagnetic Levitation System Based On Feedback LinearizationDocument5 pagesSliding Mode Control For Electromagnetic Levitation System Based On Feedback LinearizationAmit Kumar SahooNo ratings yet
- Magnetic Levitation.Document7 pagesMagnetic Levitation.komedimetrotvNo ratings yet
- Force CalculationDocument8 pagesForce CalculationAbirami RajagopalNo ratings yet
- Design of A two-Degree-of-Freedom Controller For A Magnetic Levitation System Based On LQG TechniqueDocument11 pagesDesign of A two-Degree-of-Freedom Controller For A Magnetic Levitation System Based On LQG TechniqueKhethanNo ratings yet
- Dynamic Modeling of Microcantilever Beams Over Full Operational RangeDocument9 pagesDynamic Modeling of Microcantilever Beams Over Full Operational RangeAnjireddy ThatiparthyNo ratings yet
- Garuda 1306425Document11 pagesGaruda 1306425raghavendran_beeeeNo ratings yet
- Control of A Magnetic Suspension System: Module Code: Module NameDocument30 pagesControl of A Magnetic Suspension System: Module Code: Module NameruhanNo ratings yet
- Robust Feedback Control Analysis of Magnetic Levitation SystemDocument7 pagesRobust Feedback Control Analysis of Magnetic Levitation SystemKhethanNo ratings yet
- PID Controller Design For A Magnetic Levitation System Using An IntelligentDocument8 pagesPID Controller Design For A Magnetic Levitation System Using An Intelligentambachew bizunehNo ratings yet
- Electromagnetic Levitation System: An Experimental ApproachDocument7 pagesElectromagnetic Levitation System: An Experimental Approachsh1n00b1No ratings yet
- Mems ActuatorDocument10 pagesMems ActuatorRohith RajNo ratings yet
- Modeling and Analysis of Magnetic LevitationDocument6 pagesModeling and Analysis of Magnetic Levitationambachew bizunehNo ratings yet
- Useful MaterialDocument5 pagesUseful MaterialHoney HoneyNo ratings yet
- 1, March 47: of ForDocument8 pages1, March 47: of Forcarlos gomez reyesNo ratings yet
- Design of A Magnetic Levitation Control System PDFDocument5 pagesDesign of A Magnetic Levitation Control System PDFEliel Marcos RomanciniNo ratings yet
- Linear Quadratic Regulator Controller For Magnetic Levitation SystemDocument4 pagesLinear Quadratic Regulator Controller For Magnetic Levitation SystemKhethanNo ratings yet
- Inverted PendulumDocument7 pagesInverted PendulumHowlNo ratings yet
- In The Name of ALLAH, The Most Merciful, The Most KindDocument19 pagesIn The Name of ALLAH, The Most Merciful, The Most KindDr-Muhammad Aqeel AslamNo ratings yet
- Analysis of Oscillations With Eigenanalysis andDocument8 pagesAnalysis of Oscillations With Eigenanalysis andMadhusudhan SrinivasanNo ratings yet
- PID Controller Design for MLS Using Intelligent OptimisationDocument9 pagesPID Controller Design for MLS Using Intelligent Optimisationambachew bizunehNo ratings yet
- Optimal Control Based LQR-feedback Linearisation For Magnetic Levitation Using Improved Spiral Dynamic AlgorithmDocument5 pagesOptimal Control Based LQR-feedback Linearisation For Magnetic Levitation Using Improved Spiral Dynamic AlgorithmElmer Mamani PretelNo ratings yet
- Dynamical Electromechanical Model For Magnetic BearingsDocument6 pagesDynamical Electromechanical Model For Magnetic BearingsweishuochihNo ratings yet
- Backstepping Algorithm With Sliding Mode Control For Magnetic Levitation SystemDocument5 pagesBackstepping Algorithm With Sliding Mode Control For Magnetic Levitation SystemAlfian MaarifNo ratings yet
- 10.1016 J.mechatronics.2023.103072 Y4oeDocument10 pages10.1016 J.mechatronics.2023.103072 Y4oerm903960No ratings yet
- PSO Tuned Flatness Based Control of A Magnetic Levitation SystemDocument6 pagesPSO Tuned Flatness Based Control of A Magnetic Levitation SystemKhethanNo ratings yet
- A Non-Linear Model To Approximate The Dynamics of A Pulse Width-Modulated Spray NozzleDocument10 pagesA Non-Linear Model To Approximate The Dynamics of A Pulse Width-Modulated Spray Nozzlerobert.cesarNo ratings yet
- Grigorie2008 PDFDocument10 pagesGrigorie2008 PDFManasi NaikNo ratings yet
- Sensorless Control of PMSM Motors Using Novel Estimation MethodsDocument25 pagesSensorless Control of PMSM Motors Using Novel Estimation MethodsSteve DemirelNo ratings yet
- E1FLA5 2010 v10n2 113Document6 pagesE1FLA5 2010 v10n2 113LÊ Hải NAMNo ratings yet
- DETERMINING LOCATIONS FOR POWER SYSTEM STABILIZERSDocument9 pagesDETERMINING LOCATIONS FOR POWER SYSTEM STABILIZERSSherif HelmyNo ratings yet
- Sciencedirect: An Ideal Mems Parametric Resonator Using A Tapered Comb-DriveDocument4 pagesSciencedirect: An Ideal Mems Parametric Resonator Using A Tapered Comb-DriveAgusAprilyansahNo ratings yet
- Control of Magnetic Bearing System: Hwang Hun Jeong, So Nam Yun and Joo Ho YangDocument48 pagesControl of Magnetic Bearing System: Hwang Hun Jeong, So Nam Yun and Joo Ho Yangharis shehzadNo ratings yet
- Swing Up and Stabilization Control of A Rotary Inverted PendulumDocument6 pagesSwing Up and Stabilization Control of A Rotary Inverted PendulumMuhammad HadiNo ratings yet
- FLC-MR DAMPER CONTROL OF STAY CABLE NONLINEAR VIBRATIONDocument6 pagesFLC-MR DAMPER CONTROL OF STAY CABLE NONLINEAR VIBRATIONShaikh Faruque AliNo ratings yet
- Matecconf Iccma2016 01009Document5 pagesMatecconf Iccma2016 01009MosaddekNo ratings yet
- Chaos in Power Systems: Towards Short-Term Voltage Stability AnalysisDocument5 pagesChaos in Power Systems: Towards Short-Term Voltage Stability AnalysisMarchena Segil ErikNo ratings yet
- Tie.2003.80941520211014 31894 12p42bl With Cover Page v2Document6 pagesTie.2003.80941520211014 31894 12p42bl With Cover Page v2محمد امین نیشابوریNo ratings yet
- Preliminary Study On Magnetic Levitation Modeling Using PID ControlDocument7 pagesPreliminary Study On Magnetic Levitation Modeling Using PID ControlSkyFaLL-CSNo ratings yet
- Optimization of Model Reference Adaptive Controller For The Inverted Pendulum System Using CCPSO and DE AlgorithmsDocument12 pagesOptimization of Model Reference Adaptive Controller For The Inverted Pendulum System Using CCPSO and DE AlgorithmsjanitoNo ratings yet
- On The Sliding Mode Control of A Magnetic Levitation SystemDocument8 pagesOn The Sliding Mode Control of A Magnetic Levitation SystemJohn ConnorNo ratings yet
- Lecture 02 MEE41103 Mathematical Models of Systems IDocument43 pagesLecture 02 MEE41103 Mathematical Models of Systems IMohamed HatimNo ratings yet
- Modelling and Control of An Electromechanical SteeringDocument11 pagesModelling and Control of An Electromechanical Steeringrency gil engoNo ratings yet
- Lyapunov Stability Analysis of Complex Power SystemsDocument24 pagesLyapunov Stability Analysis of Complex Power SystemsRoodi AliNo ratings yet
- Energetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationFrom EverandEnergetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- Imc Based Pid Control of A Magnetic Levitation System: SciencedirectDocument8 pagesImc Based Pid Control of A Magnetic Levitation System: SciencedirectHoàng GiangNo ratings yet
- LQR Based Optimal Tuning of PID Controller For Tra PDFDocument11 pagesLQR Based Optimal Tuning of PID Controller For Tra PDFFrancisco A Torres VNo ratings yet
- Hickman SDocument21 pagesHickman SHoàng GiangNo ratings yet
- PID, Fuzzy and LQR Controllers For Magnetic Levitation SystemDocument5 pagesPID, Fuzzy and LQR Controllers For Magnetic Levitation SystemHoàng GiangNo ratings yet
- Sliding Mode Control of A Magnetic Levitation System: Received 18 October 2003 and in Revised Form 23 February 2004Document16 pagesSliding Mode Control of A Magnetic Levitation System: Received 18 October 2003 and in Revised Form 23 February 2004Nayan NitnawareNo ratings yet
- Hickman SDocument21 pagesHickman SHoàng GiangNo ratings yet
- PID, Fuzzy and LQR Controllers For Magnetic Levitation SystemDocument5 pagesPID, Fuzzy and LQR Controllers For Magnetic Levitation SystemHoàng GiangNo ratings yet
- LQR Based Optimal Tuning of PID Controller For Tra PDFDocument11 pagesLQR Based Optimal Tuning of PID Controller For Tra PDFFrancisco A Torres VNo ratings yet
- Nonlinear Model & Controller Design For Magnetic Levitation SystemDocument6 pagesNonlinear Model & Controller Design For Magnetic Levitation SystemHoàng GiangNo ratings yet
- Imc Based Pid Control of A Magnetic Levitation System: SciencedirectDocument8 pagesImc Based Pid Control of A Magnetic Levitation System: SciencedirectHoàng GiangNo ratings yet
- Sliding Mode Control of A Magnetic Levitation System: Received 18 October 2003 and in Revised Form 23 February 2004Document16 pagesSliding Mode Control of A Magnetic Levitation System: Received 18 October 2003 and in Revised Form 23 February 2004Nayan NitnawareNo ratings yet
- Wangkheirakpam2021 Article LinearityPerformanceAndIntermoDocument9 pagesWangkheirakpam2021 Article LinearityPerformanceAndIntermosharmasamriti27No ratings yet
- Unit - 4Document53 pagesUnit - 4Meghna BhatnagarNo ratings yet
- Microprocessor & Assembly Language Lab ManualDocument49 pagesMicroprocessor & Assembly Language Lab ManualMAHMOUD CERAYNo ratings yet
- Engine Performance Test ResultsDocument6 pagesEngine Performance Test Resultsayie74100% (1)
- DX 5000 Plus User Manual NewDocument17 pagesDX 5000 Plus User Manual NewclaudiodelbiancoNo ratings yet
- "Flexible Bench": S.P.M Polytechnic Kumathe, Solapur 2018-2019Document3 pages"Flexible Bench": S.P.M Polytechnic Kumathe, Solapur 2018-2019Abhijeet DhavaleNo ratings yet
- Features: CC CC IN PeakDocument3 pagesFeatures: CC CC IN PeakRobson DiasNo ratings yet
- Jquery library overviewDocument8 pagesJquery library overviewjunaid ahmedNo ratings yet
- Jacro 175 Drilling Unit SpecsDocument2 pagesJacro 175 Drilling Unit SpecsAndreas Geo305No ratings yet
- Dolphin Wallpapers On WallpaperDogDocument1 pageDolphin Wallpapers On WallpaperDogHannah Ding (Qtps)No ratings yet
- Prequlification of ContractorDocument15 pagesPrequlification of ContractorMansoor AliNo ratings yet
- Screenshot 2023-08-24 at 9.51.35 AMDocument12 pagesScreenshot 2023-08-24 at 9.51.35 AMShivani ChahalNo ratings yet
- UPS5000-S-1200 KVA Quick GuideDocument20 pagesUPS5000-S-1200 KVA Quick Guidenobita3No ratings yet
- Problem Statements PDFDocument2 pagesProblem Statements PDFadama tharunNo ratings yet
- Using The Intel® License Manager For Flexlm : All Rights Reserved Issued in U.S.A. Document Number: 251879-005Document14 pagesUsing The Intel® License Manager For Flexlm : All Rights Reserved Issued in U.S.A. Document Number: 251879-005gingaNo ratings yet
- Train Sim World Digital Deluxe Edition 6 DLCsDocument6 pagesTrain Sim World Digital Deluxe Edition 6 DLCskemas biruNo ratings yet
- Graduation Certificate DigitalDocument6 pagesGraduation Certificate DigitalGuilherme CarvalhoNo ratings yet
- Build A Double Bazooka Antenna (K3DAV Version)Document11 pagesBuild A Double Bazooka Antenna (K3DAV Version)Steven BaynesNo ratings yet
- Multi Level InverterDocument4 pagesMulti Level InverterabsalnabiNo ratings yet
- A Practical Guide To Using QGISDocument12 pagesA Practical Guide To Using QGISsurvmichael16No ratings yet
- Design and Build An Automatic PCB Drilling MachineDocument4 pagesDesign and Build An Automatic PCB Drilling MachinemoysesdutraNo ratings yet
- Unit-4 - KOE062 Embededded System MaterialsDocument38 pagesUnit-4 - KOE062 Embededded System MaterialsRishabh PrasadNo ratings yet
- K-MCD200R SMDocument66 pagesK-MCD200R SMAurelio Gómez aguilarNo ratings yet
- Silcostart: Static Motor Softstarter Solving Starting ProblemsDocument4 pagesSilcostart: Static Motor Softstarter Solving Starting ProblemsMohamed AlkharashyNo ratings yet