You might also like
- The Drift of A Body Floating On WavesDocument11 pagesThe Drift of A Body Floating On WavesvictorNo ratings yet
- 16 - Van DeyzenDocument14 pages16 - Van DeyzenhaujesNo ratings yet
- Agarwala, Nair - 2014 - STRUCTURAL RESPONSE OF A FLOATING RUNWAY EXCITED BY THE TAKING OFF OF AN AIRPLANE Abstract-AnnotatedDocument8 pagesAgarwala, Nair - 2014 - STRUCTURAL RESPONSE OF A FLOATING RUNWAY EXCITED BY THE TAKING OFF OF AN AIRPLANE Abstract-AnnotatedTính Nguyễn TrungNo ratings yet
- Ghadimi PMRes 2016 4Document23 pagesGhadimi PMRes 2016 4EmreNo ratings yet
- Bomba Axial Horizontal PDFDocument21 pagesBomba Axial Horizontal PDFDan AlbNo ratings yet
- Determination of Drag and Lift Related Coefficients of An Auv Using Computational and Experimental Fluid Dynamics MethodsDocument15 pagesDetermination of Drag and Lift Related Coefficients of An Auv Using Computational and Experimental Fluid Dynamics MethodsSajad MansooriNo ratings yet
- Ocean Wave 1Document3 pagesOcean Wave 1alibbaaNo ratings yet
- Data Sheet: 9.9 Data Sheet Determination of Point Velocity and Roughness HeightDocument2 pagesData Sheet: 9.9 Data Sheet Determination of Point Velocity and Roughness HeightMohasin KamalNo ratings yet
- Benaroya - Capítulo 5Document76 pagesBenaroya - Capítulo 5Lucas SilvaNo ratings yet
- Delefortrie2021 Article ForcesAndTorqueActingOnARudderDocument25 pagesDelefortrie2021 Article ForcesAndTorqueActingOnARudderMaciej ReichelNo ratings yet
- Cargo Calculator Formulas - ENDocument14 pagesCargo Calculator Formulas - ENDaniel Vargas RibeiroNo ratings yet
- Tillig 4-DOFDocument11 pagesTillig 4-DOFxasolal275No ratings yet
- FULLTEXT01Document116 pagesFULLTEXT01Joyce EspirituNo ratings yet
- External FlowsDocument90 pagesExternal FlowsSüleyman BirgiNo ratings yet
- Wagner2019 Article DeepMiningARockEngineeringChal Digabungkan DikonversiDocument115 pagesWagner2019 Article DeepMiningARockEngineeringChal Digabungkan DikonversiIvan NaibahoNo ratings yet
- Sixty Years of Research On Ship RuddersDocument36 pagesSixty Years of Research On Ship RuddersshadiNo ratings yet
- Revision TutorialDocument9 pagesRevision Tutorialchavawn mckenzieNo ratings yet
- Holeyman-Whenham2017 - Article - CriticalReviewOfTheHypervib1MoDocument19 pagesHoleyman-Whenham2017 - Article - CriticalReviewOfTheHypervib1MoJúlia Hein MazuttiNo ratings yet
- High Resolution Numerical Schemes For Solving Kinematic Wave EquationDocument10 pagesHigh Resolution Numerical Schemes For Solving Kinematic Wave Equation阚光远No ratings yet
- Journal of Fluids and Structures: Pascal Hémon, Xavier Amandolese, Thomas AndrianneDocument13 pagesJournal of Fluids and Structures: Pascal Hémon, Xavier Amandolese, Thomas AndrianneReham El- DawyNo ratings yet
- Symbols and NomenclatureDocument5 pagesSymbols and NomenclatureSyahrulNo ratings yet
- CassidyDocument230 pagesCassidyKirolos AwadNo ratings yet
- Back Matter, CycloneDocument24 pagesBack Matter, CycloneVivi Diana HariskyNo ratings yet
- Simulation of A Spin-Stabilised Sports Disc: W.J. Crowther and J.R. PottsDocument19 pagesSimulation of A Spin-Stabilised Sports Disc: W.J. Crowther and J.R. PottsdavpaffNo ratings yet
- Chinnarasri Et Al. ICE2013Document12 pagesChinnarasri Et Al. ICE2013yaseen90azizNo ratings yet
- Steady Sailing Performance of A Hybrid-Sail Assisted Bulk CarrierDocument16 pagesSteady Sailing Performance of A Hybrid-Sail Assisted Bulk CarrierBoby48007No ratings yet
- Hydraulic RoutingDocument25 pagesHydraulic RoutingSileshi GizachewNo ratings yet
- Chinnarasri, Kositgittiwong, Julien - 2014 - Model of Flow Over Spillways by Computational Fluid DynamicsDocument12 pagesChinnarasri, Kositgittiwong, Julien - 2014 - Model of Flow Over Spillways by Computational Fluid DynamicsIvan Buitrago LeonNo ratings yet
- Constant H1Document19 pagesConstant H1alimontazer87No ratings yet
- A Couple Stress Uid Modeling On Free Convection Oscillatory Hydromagnetic Ow in An Inclined Rotating ChannelDocument17 pagesA Couple Stress Uid Modeling On Free Convection Oscillatory Hydromagnetic Ow in An Inclined Rotating ChannelNomaNo ratings yet
- Stability of Small Fishing Vessels in Longitudinal Waves: M.A.S. Neves, N.A. Pe Rez, L. ValerioDocument31 pagesStability of Small Fishing Vessels in Longitudinal Waves: M.A.S. Neves, N.A. Pe Rez, L. ValerioLenin ValerioNo ratings yet
- Broaching of Small BoatsDocument12 pagesBroaching of Small BoatsNourin Obaid DinaNo ratings yet
- Evaluation of Seismic Site Response of Submarine Clay Canyons Using Centrifuge ModellingDocument15 pagesEvaluation of Seismic Site Response of Submarine Clay Canyons Using Centrifuge ModellingSamuel Mollepaza TarazonaNo ratings yet
- To Study The Presence of Insecticides or Pesticides in Various Fruits and VegetablesDocument11 pagesTo Study The Presence of Insecticides or Pesticides in Various Fruits and VegetablesRahul PidiyarNo ratings yet
- Studyguide-3 - Wave MotionDocument49 pagesStudyguide-3 - Wave Motionyt100% (1)
- Riser Design Hydrodynamics Environmental Considerations - RGUDocument12 pagesRiser Design Hydrodynamics Environmental Considerations - RGUipali4christ_5308248No ratings yet
- Calibrating and Measuring Wakes and Drag Forces of Inland VesselsDocument6 pagesCalibrating and Measuring Wakes and Drag Forces of Inland Vesselsamorim.fatecNo ratings yet
- The Acoustic Analogy - A Powerful Tool in Aeroacoustics With Emphasis On Jet Noise PredictionDocument16 pagesThe Acoustic Analogy - A Powerful Tool in Aeroacoustics With Emphasis On Jet Noise PredictionKomarla DiaNo ratings yet
- Motions Forces and Mode Transitions in VDocument39 pagesMotions Forces and Mode Transitions in VMastermc23No ratings yet
- Steering GearDocument37 pagesSteering GearZinko kokyawNo ratings yet
- Selection 1 2013Document4 pagesSelection 1 2013Marcus PoonNo ratings yet
- Gen Physics 1 Q2 W8Document3 pagesGen Physics 1 Q2 W8J-heart Basabas MalpalNo ratings yet
- Ocean Wave 2Document3 pagesOcean Wave 2alibbaaNo ratings yet
- Numerical Simulation of Turbulent Flow and Heat Transfer ThoughDocument15 pagesNumerical Simulation of Turbulent Flow and Heat Transfer ThoughКирилл МаксимовNo ratings yet
- Physics Q&A f4 All ChaptersDocument50 pagesPhysics Q&A f4 All ChaptersE-SKUUL ACADEMYNo ratings yet
- A Methodology For Evaluating The Controllability of A Ship Navigating in A Restricted ChannelDocument12 pagesA Methodology For Evaluating The Controllability of A Ship Navigating in A Restricted ChannelFrank RmDettNo ratings yet
- Appendix A. Formula CollectionDocument4 pagesAppendix A. Formula CollectionsalmanNo ratings yet
- Mechanical Waves2Document29 pagesMechanical Waves2Dennis ANo ratings yet
- Physics All Chapters PDFDocument49 pagesPhysics All Chapters PDFCabdi Fitaax Kulmiye100% (1)
- Wave Machine StudyDocument13 pagesWave Machine StudyMateus Lanzi CiolaNo ratings yet
- A) Static: V T V LDocument13 pagesA) Static: V T V LAli ShamlooNo ratings yet
- S127 Nestor Garcia PDFDocument198 pagesS127 Nestor Garcia PDFNicolas PironnetNo ratings yet
- Final Lecture11Document48 pagesFinal Lecture11ViralBipinchandraRathodNo ratings yet
- Rs DamDocument65 pagesRs DamDipak BorsaikiaNo ratings yet
- Design of Bridges at Ch. 7+780 and Ch. 10+600 - 218Document1 pageDesign of Bridges at Ch. 7+780 and Ch. 10+600 - 218Vivek KumarNo ratings yet
- 2017 - Numerical Prediction of Vertical Ship Motions and Added ResistanceDocument11 pages2017 - Numerical Prediction of Vertical Ship Motions and Added ResistanceGeorge NovacNo ratings yet
- Pdstrip DocumentationDocument45 pagesPdstrip DocumentationNikhil MathewNo ratings yet
- Simulating The First Steps of A Walking Hexapod RobotDocument71 pagesSimulating The First Steps of A Walking Hexapod Robotbahamut518No ratings yet
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- Analysis of Added Resistance and Seakeeping Responses in Head Sea Conditions For Low-Speed Full Ships Using URANS ApproachDocument14 pagesAnalysis of Added Resistance and Seakeeping Responses in Head Sea Conditions For Low-Speed Full Ships Using URANS ApproachgksahaNo ratings yet
- An Optimization Study For The Bow Form of High-SpeDocument9 pagesAn Optimization Study For The Bow Form of High-SpeTihomir MarkovicNo ratings yet
- War Rifle Re-Creation - OIF M4 Carbine - RECOILDocument13 pagesWar Rifle Re-Creation - OIF M4 Carbine - RECOILTihomir MarkovicNo ratings yet
- Carbon Fiber PropertiesDocument15 pagesCarbon Fiber PropertiesTihomir MarkovicNo ratings yet
- Design and Construction of High Speed, Hard Chine Planing HullDocument8 pagesDesign and Construction of High Speed, Hard Chine Planing Hullkhristc15No ratings yet
- A New Procedure For Load Shortening and 2017 International Journal of NavaDocument15 pagesA New Procedure For Load Shortening and 2017 International Journal of NavaTihomir MarkovicNo ratings yet
- HSMV 2014 Vitiello MirandaDocument9 pagesHSMV 2014 Vitiello MirandaTihomir MarkovicNo ratings yet
- Sulphide Stress Cracking - ArticleDocument8 pagesSulphide Stress Cracking - ArticleTihomir MarkovicNo ratings yet
- Anti-Inflammatory: RecipeDocument29 pagesAnti-Inflammatory: RecipeTihomir MarkovicNo ratings yet
- Power Systems 2Document43 pagesPower Systems 2intellNo ratings yet
- Cavitation Causes, Prevention & More - Pumps & SystemsDocument5 pagesCavitation Causes, Prevention & More - Pumps & SystemsTihomir MarkovicNo ratings yet
- Linear Position Sensors: Motion Design GuideDocument22 pagesLinear Position Sensors: Motion Design GuideTihomir MarkovicNo ratings yet
- Visionsystemsdesign20220910 DLDocument63 pagesVisionsystemsdesign20220910 DLTihomir MarkovicNo ratings yet
- HSC Direct Analysis GN Aug18.PDF ImprimirDocument42 pagesHSC Direct Analysis GN Aug18.PDF ImprimirTihomir MarkovicNo ratings yet
- Design of High-Speed Planing Hulls For The Improvement of Resistance and Seakeeping PerformanceDocument17 pagesDesign of High-Speed Planing Hulls For The Improvement of Resistance and Seakeeping PerformanceLuis Fernando Concha FigueroaNo ratings yet
- How Much Horsepower Do I Need For My Boat - Formula BoatsDocument11 pagesHow Much Horsepower Do I Need For My Boat - Formula BoatsTihomir MarkovicNo ratings yet
- HSC Rules July 2016Document362 pagesHSC Rules July 2016maaathanNo ratings yet
- How To Calculate Muffler Size and Exhaust Pipe Diameter - Exhaust VideosDocument150 pagesHow To Calculate Muffler Size and Exhaust Pipe Diameter - Exhaust VideosTihomir MarkovicNo ratings yet
- Design Aspects and Applications of Deep-V Hull Forms To High Speed CraftsDocument9 pagesDesign Aspects and Applications of Deep-V Hull Forms To High Speed CraftsAnibal Puchi OpazoNo ratings yet
- HSC Direct Analysis GN Aug18.PDF ImprimirDocument42 pagesHSC Direct Analysis GN Aug18.PDF ImprimirTihomir MarkovicNo ratings yet
- High-Speed Craft 2020: Rules For Building and ClassingDocument6 pagesHigh-Speed Craft 2020: Rules For Building and ClassingTihomir MarkovicNo ratings yet
- Design of High Speed Planing Hulls For TDocument17 pagesDesign of High Speed Planing Hulls For TTihomir MarkovicNo ratings yet
- How Does A Surface Piercing (Boat) Propeller Work - Physics ForumsDocument8 pagesHow Does A Surface Piercing (Boat) Propeller Work - Physics ForumsTihomir MarkovicNo ratings yet
- DesignofPropulsionSystemsforHigh SpeedCraftDocument18 pagesDesignofPropulsionSystemsforHigh SpeedCraftSDesigner1No ratings yet
- Boat Hull Shapes - What Hull Shape Is BestDocument14 pagesBoat Hull Shapes - What Hull Shape Is BestTihomir MarkovicNo ratings yet
- Calm Water Performance of A Boat With TWDocument8 pagesCalm Water Performance of A Boat With TWTihomir MarkovicNo ratings yet
- Clean Diesel Exhaust Technology - STec TechnologyDocument6 pagesClean Diesel Exhaust Technology - STec TechnologyTihomir MarkovicNo ratings yet
- Design ConsiderationsDocument4 pagesDesign ConsiderationsTihomir MarkovicNo ratings yet
- Calculation of Principal Parameters of A Shallow Draft Vessel To Be Fitted With Two Surface Piercing PropellersDocument7 pagesCalculation of Principal Parameters of A Shallow Draft Vessel To Be Fitted With Two Surface Piercing PropellersIJIRSTNo ratings yet
- CocoaDocument24 pagesCocoaASONG ISMAELNo ratings yet
- Activity 11.2 Observing Technology Integration in The Classroom InstructionsDocument5 pagesActivity 11.2 Observing Technology Integration in The Classroom InstructionsBon Ivan Firmeza0% (1)
- Practical MagnetotelluricsDocument14 pagesPractical MagnetotelluricsjesaduNo ratings yet
- Ecology Paper With AnswersDocument27 pagesEcology Paper With AnswersJoel EastNo ratings yet
- Daylight Factor - Wikipedia, The Free EncyclopediaDocument2 pagesDaylight Factor - Wikipedia, The Free EncyclopediadasaNo ratings yet
- ALFA ThermostatDocument1 pageALFA ThermostatTamilarasi SambathNo ratings yet
- OrgMan - Week 5 - Tools in Business DecisionDocument13 pagesOrgMan - Week 5 - Tools in Business DecisionSilfa De la CruzNo ratings yet
- 2022 01 MED21A T1-Assessment QestionPaperDocument4 pages2022 01 MED21A T1-Assessment QestionPaperIshmael MvunyiswaNo ratings yet
- Shannon MillerDocument1 pageShannon MillerRahil HussainNo ratings yet
- Argumentative EssayDocument8 pagesArgumentative Essayapi-272949288No ratings yet
- 2018 (Vuorien Et Al)Document20 pages2018 (Vuorien Et Al)gowthami mNo ratings yet
- Electric CircuitsDocument7 pagesElectric CircuitsEzio AuditoreNo ratings yet
- The Four BlocksDocument107 pagesThe Four BlocksAbu EnsahNo ratings yet
- Mandowsky RicercheintornoallIconologia 1939Document22 pagesMandowsky RicercheintornoallIconologia 1939Alejandro Jaquero EsparciaNo ratings yet
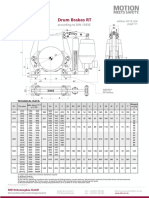
- Drum Brakes RT: According To DIN 15435Document1 pageDrum Brakes RT: According To DIN 15435LukaNo ratings yet
- Chap1 Lec1 Introduction To NLODocument3 pagesChap1 Lec1 Introduction To NLOUzair AslamNo ratings yet
- AICTE RulesDocument51 pagesAICTE Rulesrajesh dawarNo ratings yet
- Atomic StructureDocument28 pagesAtomic StructureIsrael PopeNo ratings yet
- Negotiation Self-Assessment and Vision Report - by Umang DharDocument1 pageNegotiation Self-Assessment and Vision Report - by Umang Dharumangdhar8No ratings yet
- Reconfigurable Diffractive Antenna Based On Switchable Electrically Induced TransparencyDocument12 pagesReconfigurable Diffractive Antenna Based On Switchable Electrically Induced TransparencyAnuj SharmaNo ratings yet
- D6467.1395.CD-Cohesive SoilsDocument7 pagesD6467.1395.CD-Cohesive Soilsvalmorebocanegralond100% (1)
- Fiori & Pratolongo-2021 - The Bahía Blanca EstuaryDocument579 pagesFiori & Pratolongo-2021 - The Bahía Blanca EstuarykevinNo ratings yet
- Assignment On 3 PL LogisticsDocument16 pagesAssignment On 3 PL LogisticsnirobNo ratings yet
- Electrician PDFDocument53 pagesElectrician PDFAbujaid KahnNo ratings yet
- Scholarship Essay Samples Financial NeedDocument6 pagesScholarship Essay Samples Financial Needflrzcpaeg100% (2)
- Manager Feedback Survey-GoogleDocument3 pagesManager Feedback Survey-GoogleJorge Pinho da CruzNo ratings yet
- TOPAS 5 Technical Reference - UnlockedDocument247 pagesTOPAS 5 Technical Reference - UnlockedEdilberNo ratings yet
- Qualtrics Survey Software PostDocument13 pagesQualtrics Survey Software Postapi-283622630No ratings yet
- PCS EpgDocument7 pagesPCS EpgStore ZunnieNo ratings yet
- Act Action Active Actively: Professional English Ii Unit IiDocument3 pagesAct Action Active Actively: Professional English Ii Unit IiCamila Ruiz GasparNo ratings yet