You might also like
- Parallel Distributed Computing Unit-1Document60 pagesParallel Distributed Computing Unit-1sowmya srikandeNo ratings yet
- BCSE412L - Parallel Computing 11Document9 pagesBCSE412L - Parallel Computing 11aavsgptNo ratings yet
- PartitioningDocument37 pagesPartitioninga00825006No ratings yet
- Con Currency MappingDocument40 pagesCon Currency MappingMazen AlkoaNo ratings yet
- FoP HPC Unit IIDocument107 pagesFoP HPC Unit IIAkshata ChopadeNo ratings yet
- Lecture 2.1.1Document15 pagesLecture 2.1.1deadlygamer6996No ratings yet
- Principles of Parallel Algorithm DesignDocument63 pagesPrinciples of Parallel Algorithm Designritu.agrawal31506No ratings yet
- Chapter Overview: Algorithms and Concurrency: - Introduction To Parallel AlgorithmsDocument84 pagesChapter Overview: Algorithms and Concurrency: - Introduction To Parallel Algorithmsatharva gundawarNo ratings yet
- WINSEM2022-23 CSE4001 ETH VL2022230503176 Reference Material I 02-02-2023 Module3-ParallelDecompositionDocument89 pagesWINSEM2022-23 CSE4001 ETH VL2022230503176 Reference Material I 02-02-2023 Module3-ParallelDecompositionDev Rishi ThakurNo ratings yet
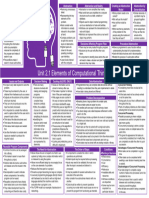
- 2.1 Elements of Computational Thinking.280155520Document1 page2.1 Elements of Computational Thinking.280155520Mark RobsonNo ratings yet
- 6 CNNDocument50 pages6 CNNSWAMYA RANJAN DASNo ratings yet
- Lecture 1Document66 pagesLecture 1trivaNo ratings yet
- 6 Module 3 Preliminaries 12-01-2023Document86 pages6 Module 3 Preliminaries 12-01-2023Pranav HiremathNo ratings yet
- CSC 413 - Software Development 4. Object Oriented Design: 2/3/18 John RobertsDocument15 pagesCSC 413 - Software Development 4. Object Oriented Design: 2/3/18 John Robertseveswan2008No ratings yet
- Week 12 - UML - Part1Document9 pagesWeek 12 - UML - Part1MUSIC & TECHNo ratings yet
- Week 0601Document23 pagesWeek 0601sam zakNo ratings yet
- Algorithm ReviewerDocument6 pagesAlgorithm ReviewerAuvioreNo ratings yet
- ConcurrencyDecomposition Parallel AlgorithmDocument40 pagesConcurrencyDecomposition Parallel AlgorithmKashif MehmoodNo ratings yet
- Data Structures and Algorithms AnalysisDocument45 pagesData Structures and Algorithms AnalysisasratNo ratings yet
- Design Model RelationshipsDocument13 pagesDesign Model RelationshipsslogeshwariNo ratings yet
- OOAD - Activity DiagramDocument13 pagesOOAD - Activity DiagramMuhammad UsmanNo ratings yet
- Chapter I-1Document29 pagesChapter I-1lemajambo7No ratings yet
- 03-Task Decomposition and MappingDocument62 pages03-Task Decomposition and MappingHouri melkonianNo ratings yet
- Advanced ProgrammingDocument28 pagesAdvanced ProgrammingJajaj AjaajaNo ratings yet
- @chapter 1 DSADocument16 pages@chapter 1 DSABaruk Umeta DegoNo ratings yet
- Introduction To Computer Simulation of Physical Systems (Lecture 1)Document63 pagesIntroduction To Computer Simulation of Physical Systems (Lecture 1)BenNo ratings yet
- Java Programming MaterialDocument40 pagesJava Programming Materialsrinivasulu thiruveedulaNo ratings yet
- Software CrisisDocument120 pagesSoftware CrisisPrince MpofuNo ratings yet
- Foundations of The C++ Concurrency Memory Model: John Mellor-Crummey and Karthik MurthyDocument31 pagesFoundations of The C++ Concurrency Memory Model: John Mellor-Crummey and Karthik MurthyGamindu Udayanga100% (1)
- Object Oriented Programming Methodology Using Java: Prof: Deepak Gaikar (Computer Department) RGIT-MumbaiDocument73 pagesObject Oriented Programming Methodology Using Java: Prof: Deepak Gaikar (Computer Department) RGIT-MumbaiAvishek ChatterjeeNo ratings yet
- OOP Lecture01 Introduction 13102022 015212pmDocument12 pagesOOP Lecture01 Introduction 13102022 015212pmMaryam KhalilNo ratings yet
- C++ NotesDocument32 pagesC++ NotesanujagrajNo ratings yet
- Unit-1 PPT (DS)Document215 pagesUnit-1 PPT (DS)Tripti GuptaNo ratings yet
- 03 - Data & LearningDocument53 pages03 - Data & LearningSoma FadiNo ratings yet
- Parallel Algorithm - IntroductionDocument36 pagesParallel Algorithm - IntroductionTejodeep BoseNo ratings yet
- Principles of OOPDocument13 pagesPrinciples of OOPMustafa100% (2)
- 10.object Oriented Design and UML DiagramsDocument101 pages10.object Oriented Design and UML DiagramsdharmadipikaemporiumNo ratings yet
- Geoffrey Hinton With Nitish Srivastava Kevin Swersky: Neural Networks For Machine LearningDocument32 pagesGeoffrey Hinton With Nitish Srivastava Kevin Swersky: Neural Networks For Machine LearningMohamed MostafaNo ratings yet
- Pertemuan 3 1Document5 pagesPertemuan 3 1Ryan wahyuNo ratings yet
- Geoffrey Hinton With Nitish Srivastava Kevin Swersky: Neural Networks For Machine LearningDocument30 pagesGeoffrey Hinton With Nitish Srivastava Kevin Swersky: Neural Networks For Machine LearningMohammad AlzyoudNo ratings yet
- CH 3Document82 pagesCH 3Ioana SoraNo ratings yet
- Lec04b-Processes and MappingDocument26 pagesLec04b-Processes and MappingaghaNo ratings yet
- Advanced Data Research PaperDocument6 pagesAdvanced Data Research Papersaurabh20apr100% (1)
- Chapter 1Document75 pagesChapter 1Hamdala tamiratNo ratings yet
- 10-Importance of Algorithms and Data Structures - Fundamentals of Alg-Analy - Space and Time Complexity-03-08-2022Document17 pages10-Importance of Algorithms and Data Structures - Fundamentals of Alg-Analy - Space and Time Complexity-03-08-2022IshankNo ratings yet
- Implement - Graph DatabasesDocument40 pagesImplement - Graph DatabaseschitraalavaniNo ratings yet
- Gradnorm: Gradient Normalization For Adaptive Loss Balancing in Deep Multitask NetworksDocument12 pagesGradnorm: Gradient Normalization For Adaptive Loss Balancing in Deep Multitask NetworksTTNo ratings yet
- OOP - Final Notes PDFDocument133 pagesOOP - Final Notes PDFAnonymous eV1QpyRNo ratings yet
- Principles of Parallel Algorithm DesignDocument78 pagesPrinciples of Parallel Algorithm DesignKarthik LaxmikanthNo ratings yet
- Semester Genap 2010/2011: Beni Suranto, STDocument27 pagesSemester Genap 2010/2011: Beni Suranto, STSeptian D. PrayogiNo ratings yet
- Algorithm Sequence of Unambiguous Instructions For Solving A Problem Finite Amount of TimeDocument4 pagesAlgorithm Sequence of Unambiguous Instructions For Solving A Problem Finite Amount of TimeShivang AgarwalNo ratings yet
- Kiet School of Engineering & Technology: Department of Computer AppicationDocument30 pagesKiet School of Engineering & Technology: Department of Computer AppicationGaurav KumarNo ratings yet
- ch2 PCDocument44 pagesch2 PCfariha2002No ratings yet
- Parallel Programming Models: Sathish VadhiyarDocument32 pagesParallel Programming Models: Sathish VadhiyardhruvbhagtaniNo ratings yet
- High-Level Optimizations: Embedded System OptimizationDocument5 pagesHigh-Level Optimizations: Embedded System OptimizationDrin PortentoNo ratings yet
- 02 - Diagnostics For Machine Learning ModelDocument20 pages02 - Diagnostics For Machine Learning ModelMauJuarezSanNo ratings yet
- An Improved Approach For Load Balancing Among VirtualDocument11 pagesAn Improved Approach For Load Balancing Among VirtualvijiviswanathanNo ratings yet
- Tutorial No 1 (Solved)Document2 pagesTutorial No 1 (Solved)mmed68003No ratings yet
- Chapter 3 - Principles of Parallel Algorithm DesignDocument52 pagesChapter 3 - Principles of Parallel Algorithm DesignMumbi NjorogeNo ratings yet
- 8-Parallel Algorithm Design - Preliminaries-09-Jan-2020Material - I - 09-Jan-2020 - Module - 3 - Preliminaries PDFDocument18 pages8-Parallel Algorithm Design - Preliminaries-09-Jan-2020Material - I - 09-Jan-2020 - Module - 3 - Preliminaries PDFANTHONY NIKHIL REDDYNo ratings yet
- VL2021220104087 DaDocument1 pageVL2021220104087 DaRishabh NagarNo ratings yet
- FALLSEM2021-22 CSE4001 ETH VL2021220104087 Reference Material I 21-09-2021 Module 3 Mapping TechniquesDocument25 pagesFALLSEM2021-22 CSE4001 ETH VL2021220104087 Reference Material I 21-09-2021 Module 3 Mapping TechniquesRishabh NagarNo ratings yet
- Fallsem2021-22 Cse4001 Eth Vl2021220104087 Reference Material I 02-09-2021 Module 3 Decomposition TechniquesDocument21 pagesFallsem2021-22 Cse4001 Eth Vl2021220104087 Reference Material I 02-09-2021 Module 3 Decomposition TechniquesRishabh NagarNo ratings yet
- Vehicle Tracking System Using GPS and GSM TechnologyDocument5 pagesVehicle Tracking System Using GPS and GSM TechnologyIJRASETPublicationsNo ratings yet
- ADBs Request For Proposal RFP Core Banking SolutionDocument49 pagesADBs Request For Proposal RFP Core Banking Solutionindia nesan100% (1)
- Q SeriesDocument3 pagesQ SeriessimplificayresuelveNo ratings yet
- This Study Resource WasDocument2 pagesThis Study Resource WasSara AlbogamiNo ratings yet
- PN-VC841H: Intelligent Touch BoardDocument3 pagesPN-VC841H: Intelligent Touch BoardMohamed ShawkyNo ratings yet
- Unit 1 Chapter 1: Introduction: Operating System F.Y.Bsc - It Prof. Sujata RizalDocument31 pagesUnit 1 Chapter 1: Introduction: Operating System F.Y.Bsc - It Prof. Sujata RizalRAJESHNo ratings yet
- Shimadzu Mobiledart Evolution Installation Manual - rv2Document554 pagesShimadzu Mobiledart Evolution Installation Manual - rv2Jhairzito RM83% (6)
- User Manual With FAQs-Novajet Label PrintingDocument6 pagesUser Manual With FAQs-Novajet Label Printingankitshah1No ratings yet
- Importance of SoftwareDocument12 pagesImportance of SoftwareALI HASANNo ratings yet
- Boot Menu Reference ListDocument5 pagesBoot Menu Reference ListRusselguide ElectronicsNo ratings yet
- 7600 SERIES 4 de 4Document73 pages7600 SERIES 4 de 4consultachNo ratings yet
- PR - Exam - WS21 - 22 SolDocument19 pagesPR - Exam - WS21 - 22 SolJohn FilixNo ratings yet
- Machine Learning Time Series PythonDocument371 pagesMachine Learning Time Series PythonTrung Luong100% (3)
- The VBA GetAttr FunctionDocument3 pagesThe VBA GetAttr FunctionYamini ShindeNo ratings yet
- X12/V6020/810: 810 InvoiceDocument38 pagesX12/V6020/810: 810 Invoicejeffa123No ratings yet
- PROG8520 - Week 9 - SlidesDocument43 pagesPROG8520 - Week 9 - Slidessimran sidhuNo ratings yet
- Discrete Mathematics: Presented byDocument16 pagesDiscrete Mathematics: Presented byArif RezaNo ratings yet
- The Many Facts Pointing To Paul Le Roux Being Satoshi Nakamoto - Bitcoin NewsDocument14 pagesThe Many Facts Pointing To Paul Le Roux Being Satoshi Nakamoto - Bitcoin Newsmc.capitao.do.matoNo ratings yet
- Components of Computer and Their FunctionsDocument4 pagesComponents of Computer and Their FunctionsDanielAyalewNo ratings yet
- Internship ReportDocument16 pagesInternship ReportSaurabh KumarNo ratings yet
- 3PAR Remote Copy With VMware Site Recovery ManagerDocument15 pages3PAR Remote Copy With VMware Site Recovery ManagerYordanka Atanasova StoyanovaNo ratings yet
- The Principles of Document ManagementDocument8 pagesThe Principles of Document ManagementmanugeorgeNo ratings yet
- Business Chat EtiquetteDocument13 pagesBusiness Chat Etiquettekarpore100% (1)
- Shahjalal Shakil: Career ObjectiveDocument2 pagesShahjalal Shakil: Career ObjectiveShahjalal Shakil 143-15-4252No ratings yet
- Deep Learning: Dr. Sanjeev SharmaDocument61 pagesDeep Learning: Dr. Sanjeev SharmaRushikesh DheteNo ratings yet
- Chapter 3 PDFDocument27 pagesChapter 3 PDFShiv NeelNo ratings yet
- Sprac 51Document16 pagesSprac 51fabiolmtNo ratings yet
- Abhijit ManepatilDocument3 pagesAbhijit ManepatilPankaj WarokarNo ratings yet
- Losing Lotto, A Mathematical Approach: Michael SnookDocument28 pagesLosing Lotto, A Mathematical Approach: Michael SnookAntonio Ayrton Pereira da SilvaNo ratings yet
- XBOX360 FAT Jasper FabB Retail RevADocument76 pagesXBOX360 FAT Jasper FabB Retail RevADiego rangel hernandez100% (1)