You might also like
- Answer Key - CK-12 PreCalculus ConceptsDocument171 pagesAnswer Key - CK-12 PreCalculus ConceptsFrederichNietszche100% (2)
- Lecture Notes MatricesDocument90 pagesLecture Notes MatricesRR886No ratings yet
- Refresher Algebra CalculusDocument2 pagesRefresher Algebra Calculusishaaneja1100% (1)
- Introduction To General Relativity - G. T.hooftDocument68 pagesIntroduction To General Relativity - G. T.hooftmostafa-tallat70No ratings yet
- Mathematics of M-Theory PDFDocument19 pagesMathematics of M-Theory PDFAlireza TakrimiNo ratings yet
- (Addison-Wesley Series in Mathematics) Edwin E. Moise-Calculus-Addison-Wesley (1972) PDFDocument776 pages(Addison-Wesley Series in Mathematics) Edwin E. Moise-Calculus-Addison-Wesley (1972) PDFEsptiben Rojas100% (3)
- Matrix - Xla - Excel AddinDocument112 pagesMatrix - Xla - Excel AddinUmashanker SivaNo ratings yet
- Solving The Hamiltonian Cycle Problem Using Symbolic DeterminantsDocument12 pagesSolving The Hamiltonian Cycle Problem Using Symbolic DeterminantsKiet NguyenNo ratings yet
- Knot Types, Floquet Spectra, and Finite-Gap Solutions of The Vortex Filament EquationDocument10 pagesKnot Types, Floquet Spectra, and Finite-Gap Solutions of The Vortex Filament EquationVing666789No ratings yet
- V A Atanasov Et Al - Fordy-Kulish Model and Spinor Bose-Einstein CondensateDocument8 pagesV A Atanasov Et Al - Fordy-Kulish Model and Spinor Bose-Einstein CondensatePomac232No ratings yet
- Glasnik Matemati CKI Vol. 53 (73) (2018), 51 - 71: Key Words and PhrasesDocument21 pagesGlasnik Matemati CKI Vol. 53 (73) (2018), 51 - 71: Key Words and PhrasesHanif MohammadNo ratings yet
- Automorphisms of Character VarietiesDocument11 pagesAutomorphisms of Character VarietiesChristopher SIMONNo ratings yet
- Algebras Advanced Lecture NoteDocument16 pagesAlgebras Advanced Lecture NoteHuong Cam ThuyNo ratings yet
- The' Wave Equation: 1.1 One Dimension: Waves On A Stretched StringDocument12 pagesThe' Wave Equation: 1.1 One Dimension: Waves On A Stretched StringDavid ThomsonNo ratings yet
- J. Differential Geometry 95 (2013) 71-119: Received 5/25/2012Document49 pagesJ. Differential Geometry 95 (2013) 71-119: Received 5/25/2012Leghrieb RaidNo ratings yet
- DiagonalIzation MatrixDocument4 pagesDiagonalIzation MatrixPengintaiNo ratings yet
- MMA320 Introduction To Algebraic Geometry Jan Stevens Matematik G Oteborgs UniversitetDocument71 pagesMMA320 Introduction To Algebraic Geometry Jan Stevens Matematik G Oteborgs UniversitethalcemailNo ratings yet
- Preliminaries: What You Need To Know: Classical DynamicsDocument5 pagesPreliminaries: What You Need To Know: Classical Dynamicsclarkalel1No ratings yet
- One Complex Variable NotesDocument82 pagesOne Complex Variable NotesAngie CamargoNo ratings yet
- Elliptic Curve Cryptography Final Report For A Project in Computer SecurityDocument36 pagesElliptic Curve Cryptography Final Report For A Project in Computer SecurityAnjishnu MahantaNo ratings yet
- Linear Algebra Via Complex Analysis: Alexander P. Campbell and Daniel Daners Revised Version September 13, 2012Document19 pagesLinear Algebra Via Complex Analysis: Alexander P. Campbell and Daniel Daners Revised Version September 13, 2012J Luis MlsNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Optimal Ordering SchemesDocument26 pagesOptimal Ordering SchemesSubramaniam GnanasekaranNo ratings yet
- Giesl2004 PDFDocument35 pagesGiesl2004 PDFAngela Camila SanchezNo ratings yet
- Finite-Type Invariants of Cubic Complexes: © 2003 Kluwer Academic Publishers. Printed in The NetherlandsDocument8 pagesFinite-Type Invariants of Cubic Complexes: © 2003 Kluwer Academic Publishers. Printed in The Netherlandsbdalcin5512No ratings yet
- Holonomic D-Modules and Positive CharacteristicDocument25 pagesHolonomic D-Modules and Positive CharacteristicHuong Cam ThuyNo ratings yet
- A Spectral Approach To BandwidthDocument19 pagesA Spectral Approach To Bandwidthforoud_makvandi1985No ratings yet
- LMSlecturesDocument82 pagesLMSlecturesIsmael HuertaNo ratings yet
- HSERILibDocument12 pagesHSERILibVivi D ArknessNo ratings yet
- Equivariant Casson Invariants and Links of SingularitiesDocument15 pagesEquivariant Casson Invariants and Links of Singularitiesbdalcin5512No ratings yet
- Least Squares EllipsoidDocument17 pagesLeast Squares EllipsoidJoco Franz AmanoNo ratings yet
- Band Edge Limit of The Scattering Matrix For Quasi-One-Dimensional Discrete SCHR Odinger OperatorsDocument26 pagesBand Edge Limit of The Scattering Matrix For Quasi-One-Dimensional Discrete SCHR Odinger OperatorsmemfilmatNo ratings yet
- The Existence of Generalized Inverses of Fuzzy MatricesDocument14 pagesThe Existence of Generalized Inverses of Fuzzy MatricesmciricnisNo ratings yet
- Similarity TransofmationDocument15 pagesSimilarity Transofmationsubbu205No ratings yet
- Classical Model Theory of FieldsDocument16 pagesClassical Model Theory of FieldsDiego CameloNo ratings yet
- Calculation of Lyapunov Exponents in Time-Delayed SystemsDocument8 pagesCalculation of Lyapunov Exponents in Time-Delayed Systemscsernak2No ratings yet
- Agmon 1954Document11 pagesAgmon 1954anil.newscientistNo ratings yet
- HomologyDocument17 pagesHomologyAlbert SchwarzNo ratings yet
- Polynomials and Difference Equations:: AppendixDocument9 pagesPolynomials and Difference Equations:: AppendixchrischovNo ratings yet
- Linear Algebra Via Complex Analysis: Alexander P. Campbell Daniel Daners Corrected Version January 24, 2014Document17 pagesLinear Algebra Via Complex Analysis: Alexander P. Campbell Daniel Daners Corrected Version January 24, 2014IgorBorodinNo ratings yet
- FINAL Every Lie Algebra Homomorphism Gives Rise To A Canonical Lie Group Homomorphism If The Domain Group Is Simply ConnectedDocument26 pagesFINAL Every Lie Algebra Homomorphism Gives Rise To A Canonical Lie Group Homomorphism If The Domain Group Is Simply ConnectedMehrotraashirNo ratings yet
- Degenerate Poisson Pencils On Curves New Separability Theory - BlaszakDocument31 pagesDegenerate Poisson Pencils On Curves New Separability Theory - BlaszakKrishan RajaratnamNo ratings yet
- Modes in Linear CircuitsDocument13 pagesModes in Linear CircuitsmtichyNo ratings yet
- Bifurcation Theory Wo ParametersDocument15 pagesBifurcation Theory Wo ParametersJohn StarrettNo ratings yet
- Theorist's Toolkit Lecture 2-3: LP DualityDocument9 pagesTheorist's Toolkit Lecture 2-3: LP DualityJeremyKunNo ratings yet
- VI. Notes (Played) On The Vibrating StringDocument20 pagesVI. Notes (Played) On The Vibrating Stringjose2017No ratings yet
- S V V SDocument8 pagesS V V STomasz PrzezdzieckiNo ratings yet
- Spectral TheoryDocument11 pagesSpectral TheoryThảo NgọcNo ratings yet
- Shmuel Lifsches and Saharon Shelah - Random Graphs in The Monadic Theory of OrderDocument37 pagesShmuel Lifsches and Saharon Shelah - Random Graphs in The Monadic Theory of OrderJgfm2No ratings yet
- Study of Classical Integrable Field Thoery and Defect ProblemDocument28 pagesStudy of Classical Integrable Field Thoery and Defect ProblemMuhammad Hasan RazaNo ratings yet
- AngmomDocument29 pagesAngmomYılmaz ÇolakNo ratings yet
- Derived CatsDocument14 pagesDerived CatsEpic WinNo ratings yet
- CH 6Document16 pagesCH 6tareqkh1No ratings yet
- 1.8 Similarity Transformations 15Document15 pages1.8 Similarity Transformations 15Mae RohNo ratings yet
- Relations Between Summation Methods and Integral TransformationsDocument13 pagesRelations Between Summation Methods and Integral TransformationsGeralt RiviaNo ratings yet
- John H. Hubbard: Dedicated To Yulij Ilyashenko On The Occasion of His 60th BirthdayDocument20 pagesJohn H. Hubbard: Dedicated To Yulij Ilyashenko On The Occasion of His 60th BirthdaydomeleuNo ratings yet
- Algebraic Cycles, Chow Varieties, and Lawson HomologyDocument40 pagesAlgebraic Cycles, Chow Varieties, and Lawson HomologyEladio Escobedo de pruebat.orgNo ratings yet
- Eigenvalue Problem: 4.1 MathematicsDocument26 pagesEigenvalue Problem: 4.1 Mathematicssree2728No ratings yet
- Variable Neighborhood Search For The Probabilistic Satisfiability ProblemDocument6 pagesVariable Neighborhood Search For The Probabilistic Satisfiability Problemsk8888888No ratings yet
- A Generalized Prey-Predator Model: Letters To The EditorDocument4 pagesA Generalized Prey-Predator Model: Letters To The EditorGNo ratings yet
- Intersection Theory - Valentina KiritchenkoDocument18 pagesIntersection Theory - Valentina KiritchenkoHoracio CastellanosNo ratings yet
- 1006.4473 A Combinatorial Solution To LIMO 2010 Question 10Document5 pages1006.4473 A Combinatorial Solution To LIMO 2010 Question 10hongnhNo ratings yet
- Aula 7 - Teoria de Cordas MITDocument7 pagesAula 7 - Teoria de Cordas MITErick MouraNo ratings yet
- Phase Plane AnalysisDocument10 pagesPhase Plane AnalysisildmgzalNo ratings yet
- Research StatementDocument5 pagesResearch StatementEmad AbdurasulNo ratings yet
- Motherboard: Prepared byDocument43 pagesMotherboard: Prepared bytapas_bayen9388No ratings yet
- QueueDocument1 pageQueuetapas_bayen9388No ratings yet
- StackDocument1 pageStacktapas_bayen9388No ratings yet
- Answer All Questions. 2. Part A - Each 1 Mark 3. Part B - Each 3 Marks 4. Part C - Each 10 MarksDocument1 pageAnswer All Questions. 2. Part A - Each 1 Mark 3. Part B - Each 3 Marks 4. Part C - Each 10 Markstapas_bayen9388No ratings yet
- M.S.P.Velayutha Nadar Lakshmithaiammal Polytechnic College, PavoorchatramDocument1 pageM.S.P.Velayutha Nadar Lakshmithaiammal Polytechnic College, Pavoorchatramtapas_bayen9388No ratings yet
- Difference Between Analog ComputerDocument1 pageDifference Between Analog Computertapas_bayen9388No ratings yet
- Virtual Vs Physical AddressesDocument5 pagesVirtual Vs Physical Addressestapas_bayen9388No ratings yet
- Active HDL Simulation TutorialDocument6 pagesActive HDL Simulation Tutorialtapas_bayen9388No ratings yet
- DeterminantsDocument1 pageDeterminantsJanakChandPNo ratings yet
- Determinants: BY Anshuman Sharma Class Xii ADocument17 pagesDeterminants: BY Anshuman Sharma Class Xii AAjitesh AwasthiNo ratings yet
- Advanced Derivatives PricingDocument561 pagesAdvanced Derivatives PricingXincheng Cai100% (1)
- Maths Notes Xii Determinants Board Exam Imp QUESTION)Document2 pagesMaths Notes Xii Determinants Board Exam Imp QUESTION)Subhodeep GhoshNo ratings yet
- NCERT Class 12 Maths Notes, NCERT Notes For Class 12 PDFDocument4 pagesNCERT Class 12 Maths Notes, NCERT Notes For Class 12 PDFpranay kumar surabhiNo ratings yet
- 02-1 Linear Algebraic EquationsDocument29 pages02-1 Linear Algebraic EquationsAseel OtoumNo ratings yet
- Zagreb University of Applied Sciences (PDFDrive)Document151 pagesZagreb University of Applied Sciences (PDFDrive)Myo Tin Ko OoNo ratings yet
- 9 Ideal Truss: Force MethodDocument8 pages9 Ideal Truss: Force MethodAiman RashidNo ratings yet
- Module 7: Systems of Linear Equations in Two or More VariablesDocument6 pagesModule 7: Systems of Linear Equations in Two or More VariablesmoreNo ratings yet
- Lecture Note 2-Matrix and DeterminantDocument39 pagesLecture Note 2-Matrix and DeterminantTerrenceNo ratings yet
- Secondary One - Second Term - Algebra Final RevisionDocument75 pagesSecondary One - Second Term - Algebra Final RevisionUnicorn KittyNo ratings yet
- Pu Cet Ug 2014Document57 pagesPu Cet Ug 2014AnweshaBose100% (2)
- Mathematics M AssignmentDocument9 pagesMathematics M Assignmentzhun gweiNo ratings yet
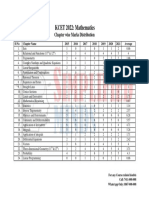
- KCET 2022: Mathematics: Chapter Wise Marks DistributionDocument1 pageKCET 2022: Mathematics: Chapter Wise Marks DistributionG GnaneshwarNo ratings yet
- PETE-560 Mathematical Methods in Petroleum Engineering Lecture Notes Chapter # 5 6.1 Linear AlgebraDocument50 pagesPETE-560 Mathematical Methods in Petroleum Engineering Lecture Notes Chapter # 5 6.1 Linear AlgebratayyabmujahidNo ratings yet
- UGCM1653 - Chapter 1 Linear Algebra - 202001 PDFDocument40 pagesUGCM1653 - Chapter 1 Linear Algebra - 202001 PDF木辛耳总No ratings yet
- Bca s101 MathDocument11 pagesBca s101 MathanilperfectNo ratings yet
- 1 Exercises: Physics 195 Course Notes Angular Momentum Solutions To Problems 030131 F. PorterDocument48 pages1 Exercises: Physics 195 Course Notes Angular Momentum Solutions To Problems 030131 F. PorterKadu BritoNo ratings yet
- Two Simple Proofs For Cramer's Rule: Frank The Giant Bunny April 9, 2016Document1 pageTwo Simple Proofs For Cramer's Rule: Frank The Giant Bunny April 9, 2016AY6061No ratings yet
- B.S - Physics Semester SystemDocument47 pagesB.S - Physics Semester SystemIrfan NoorNo ratings yet
- PrasolovDocument228 pagesPrasolovhellhawk123No ratings yet
- Test Bank For College Algebra 10th Edition Ron LarsonDocument35 pagesTest Bank For College Algebra 10th Edition Ron Larsonaheightgulfyxlydwn100% (50)
- Elementary Linear Algebra - Stephen Andrilli, David HeckerDocument124 pagesElementary Linear Algebra - Stephen Andrilli, David HeckerhodNo ratings yet
- Assign 2Document10 pagesAssign 2Asha JakharNo ratings yet
- glossary.sty v 2.4: L TEX 2ε Package to Assist Generating GlossariesDocument55 pagesglossary.sty v 2.4: L TEX 2ε Package to Assist Generating GlossariesDuong ThaoNo ratings yet