You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Z18xe Opel EcotecDocument6 pagesZ18xe Opel EcotecSean Osborne25% (4)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Simple SWB RecumbentDocument15 pagesSimple SWB Recumbentjamerico1No ratings yet
- 1971 Johnson 60HP Outboards Service Manual PDFDocument5 pages1971 Johnson 60HP Outboards Service Manual PDFChrisStainton0% (1)
- WP226L BA ET enDocument97 pagesWP226L BA ET enDmytro 1No ratings yet
- CAT - 3126B.Prefix 1BWDocument7 pagesCAT - 3126B.Prefix 1BWPhil B.No ratings yet
- DORC SOP For Operations StaffDocument7 pagesDORC SOP For Operations StaffChiemeka Osondu100% (1)
- Sevice Manual For YN33CR DieselDocument113 pagesSevice Manual For YN33CR Dieselgustavo100% (3)
- Service Manual: ForewordDocument1,324 pagesService Manual: ForewordredNo ratings yet
- Chapter 2 Combined Cycle OperationDocument70 pagesChapter 2 Combined Cycle OperationGloria Del Carmen MuñozNo ratings yet
- United States Patent (10) Patent No.: US 7.690,520 B2: Zakula, Sr. Et Al. (45) Date of Patent: Apr. 6, 2010Document15 pagesUnited States Patent (10) Patent No.: US 7.690,520 B2: Zakula, Sr. Et Al. (45) Date of Patent: Apr. 6, 2010devanasokaNo ratings yet
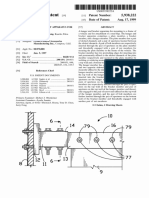
- United States Patent (19) : Huang (45) Date of Patent: Aug. 17, 1999Document8 pagesUnited States Patent (19) : Huang (45) Date of Patent: Aug. 17, 1999devanasokaNo ratings yet
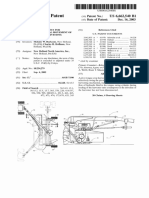
- United States Patent (10) Patent No.: US 6,662,540 B1: Harkcom Et Al. (45) Date of Patent: Dec. 16, 2003Document9 pagesUnited States Patent (10) Patent No.: US 6,662,540 B1: Harkcom Et Al. (45) Date of Patent: Dec. 16, 2003devanasokaNo ratings yet
- Hydraulic PowerDocument6 pagesHydraulic PowerdevanasokaNo ratings yet
- Metrology Objective QuestionsDocument34 pagesMetrology Objective QuestionssusansopiaNo ratings yet
- Mechanical 4Document31 pagesMechanical 4devanasokaNo ratings yet
- 143 - WaterleaksDocument11 pages143 - WaterleaksGedas GvildysNo ratings yet
- Daftar List Unit PenambanganDocument1 pageDaftar List Unit PenambanganArdi dutaNo ratings yet
- EulerMotors - Introduction DeckDocument16 pagesEulerMotors - Introduction DeckgaurangchotiaNo ratings yet
- Pneumabloc Elastic Couplings Général Characteristics: ApplicationsDocument9 pagesPneumabloc Elastic Couplings Général Characteristics: ApplicationsDejan KostadinovicNo ratings yet
- Xaser IIIV1000 ASeriesDocument2 pagesXaser IIIV1000 ASeriesWilson WangNo ratings yet
- MG Motor India - WikipediaDocument9 pagesMG Motor India - WikipediaNUTHI SIVA SANTHANNo ratings yet
- Solar Pump Inverter ManualDocument56 pagesSolar Pump Inverter ManualNé Togo Yé AbuNo ratings yet
- TYPE 1100-4G: Data SheetDocument2 pagesTYPE 1100-4G: Data SheetHashmat AliNo ratings yet
- Lexus-Lfa-Brochure en EuDocument17 pagesLexus-Lfa-Brochure en Eumahmut ezikNo ratings yet
- Especificaciones TecnicasDocument43 pagesEspecificaciones TecnicasCarlos Andrès Enríquez RodríguezNo ratings yet
- Sliding Gate InstallationDocument9 pagesSliding Gate InstallationNurin AdilahNo ratings yet
- SUPER 1900-3i: Highway ClassDocument23 pagesSUPER 1900-3i: Highway ClassHussein SayedNo ratings yet
- Group 2 SpecificationsDocument23 pagesGroup 2 SpecificationsАлексей СморчковNo ratings yet
- Sparepart 20177Document10 pagesSparepart 20177IvanovikJuwanaNo ratings yet
- 2019 Harley-Davidson® Trouble Codes, Check Engine LightDocument27 pages2019 Harley-Davidson® Trouble Codes, Check Engine Light张连杉No ratings yet
- Toyota Rush Pros and ConsDocument6 pagesToyota Rush Pros and Consamelna enterpriNo ratings yet
- Manuli Equipment Catalogue 2022 V1 - 1Document100 pagesManuli Equipment Catalogue 2022 V1 - 1Nikola AngjelkovskiNo ratings yet
- Refinery Maintenance ReportDocument8 pagesRefinery Maintenance Reporteaang55No ratings yet
- Operation Manual For Model SP 305Document104 pagesOperation Manual For Model SP 305alexnobinarie04No ratings yet
- Chains For Power TransmissionDocument11 pagesChains For Power TransmissionQasim JavedNo ratings yet
- SCC 5/7" In-Cab Controller: OperationDocument14 pagesSCC 5/7" In-Cab Controller: Operationmamdouh musaddiNo ratings yet