You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Mercedes Benz Actros Mp2, Mp3 Wiring Diagram DownloadDocument1 pageMercedes Benz Actros Mp2, Mp3 Wiring Diagram DownloadZezo Fazer38% (8)
- 6 67 (0:,5,1 ',$ 5$06 $Uwlfoh7H (W: 9Ronvzdjhq-Hwwd) RukwwsyronvzdjhqpvnuxDocument49 pages6 67 (0:,5,1 ',$ 5$06 $Uwlfoh7H (W: 9Ronvzdjhq-Hwwd) RukwwsyronvzdjhqpvnuxRaul Espinosa NegreteNo ratings yet
- B15S-7 Sb1265e01Document427 pagesB15S-7 Sb1265e01GORDNo ratings yet
- Specs Atr 42-500 PDFDocument6 pagesSpecs Atr 42-500 PDFMakhou LadoumNo ratings yet
- DL-91A: Classroom Instruction Log RecordDocument1 pageDL-91A: Classroom Instruction Log Recordmy30190% (2)
- The Boeing Company 2021 Annual ReportDocument180 pagesThe Boeing Company 2021 Annual ReportNguyễn Văn TàiNo ratings yet
- 00 169 Panda 603.81.107 en 03 02.07 L LG PDFDocument207 pages00 169 Panda 603.81.107 en 03 02.07 L LG PDFAdi StancuNo ratings yet
- Internship Report On Suzuki Multan MotorsDocument101 pagesInternship Report On Suzuki Multan MotorsAhmed Nasir50% (2)
- Caja AuxiliarDocument4 pagesCaja Auxiliarruben_cruz_34100% (1)
- United States Patent (10) Patent No.: US 7.690,520 B2: Zakula, Sr. Et Al. (45) Date of Patent: Apr. 6, 2010Document15 pagesUnited States Patent (10) Patent No.: US 7.690,520 B2: Zakula, Sr. Et Al. (45) Date of Patent: Apr. 6, 2010devanasokaNo ratings yet
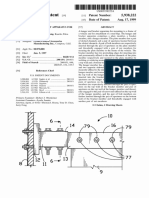
- United States Patent (19) : Huang (45) Date of Patent: Aug. 17, 1999Document8 pagesUnited States Patent (19) : Huang (45) Date of Patent: Aug. 17, 1999devanasokaNo ratings yet
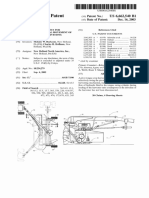
- United States Patent (10) Patent No.: US 6,662,540 B1: Harkcom Et Al. (45) Date of Patent: Dec. 16, 2003Document9 pagesUnited States Patent (10) Patent No.: US 6,662,540 B1: Harkcom Et Al. (45) Date of Patent: Dec. 16, 2003devanasokaNo ratings yet
- Hydraulic PowerDocument6 pagesHydraulic PowerdevanasokaNo ratings yet
- Metrology Objective QuestionsDocument34 pagesMetrology Objective QuestionssusansopiaNo ratings yet
- Mechanical 4Document31 pagesMechanical 4devanasokaNo ratings yet
- Dump FM 350 PL - 1742889685Document1 pageDump FM 350 PL - 1742889685tizar wahyudiNo ratings yet
- 2019 03 AS-7517-2014 Wheelsets PreviewDocument19 pages2019 03 AS-7517-2014 Wheelsets PreviewAriful Hassan KallolNo ratings yet
- Ap 2089Document170 pagesAp 2089dianavg.9319No ratings yet
- E Ticket Ticketed: Passenger Name Ticket Number Frequent Flyer NoDocument1 pageE Ticket Ticketed: Passenger Name Ticket Number Frequent Flyer NovishalNo ratings yet
- Diamond Interchange: Important Year's of Highway DevelopmentDocument2 pagesDiamond Interchange: Important Year's of Highway DevelopmentRam TqrNo ratings yet
- Checklist For Buying A Better Used Car in MalaysiaDocument2 pagesChecklist For Buying A Better Used Car in MalaysiaSurendra KumarNo ratings yet
- Roger Johnson (Auth.) - The Green City-Macmillan Education UK (1979)Document177 pagesRoger Johnson (Auth.) - The Green City-Macmillan Education UK (1979)Shella RasuhNo ratings yet
- Motor Vehicle Insrance - Merlyn CoelhoDocument61 pagesMotor Vehicle Insrance - Merlyn CoelhoMerlyn CoelhoNo ratings yet
- Design Thinking Fundamental and Its Critical Role in Car DesigningDocument6 pagesDesign Thinking Fundamental and Its Critical Role in Car DesigningSumit KashyapNo ratings yet
- BRIO RW Consumer 2011 - Trains en BoisDocument40 pagesBRIO RW Consumer 2011 - Trains en BoisMarcM77No ratings yet
- Time Table of Night Bus ServicesDocument8 pagesTime Table of Night Bus ServicestestscribdNo ratings yet
- Limited Slip Differential: Submitted byDocument13 pagesLimited Slip Differential: Submitted byPranav SinghNo ratings yet
- Herpa NH 01-02-2022 Wings Mit PreisDocument8 pagesHerpa NH 01-02-2022 Wings Mit Preisسهیل فلاحNo ratings yet
- HHBHDocument38 pagesHHBHARIKA NABILA -No ratings yet
- R1, R2, L1, X, Left, Down, Right, Up, Left, Down, Right, Up $250,000, Full Health and Armor (Also Repairs Cars If You Are in One)Document3 pagesR1, R2, L1, X, Left, Down, Right, Up, Left, Down, Right, Up $250,000, Full Health and Armor (Also Repairs Cars If You Are in One)akqyNo ratings yet
- Metroline - ANALYSIS AND EVALUATION OF OPERATIONSDocument10 pagesMetroline - ANALYSIS AND EVALUATION OF OPERATIONSrandoalboNo ratings yet
- SOLAS Requirement Regarding Fire Water PressureDocument1 pageSOLAS Requirement Regarding Fire Water Pressurehugo YangNo ratings yet
- AW Topic 0a General Update - Certification and StandardsDocument5 pagesAW Topic 0a General Update - Certification and StandardsrubenarisNo ratings yet
- R33 Manual (Exploded Views Only)Document193 pagesR33 Manual (Exploded Views Only)docmaduro100% (5)
- AsdfghjkklDocument119 pagesAsdfghjkklKarlayaanNo ratings yet