You might also like
- BIGM - Two PhaseDocument58 pagesBIGM - Two PhaseSudhanwa KulkarniNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Big M MethodDocument29 pagesBig M MethodMandeep SinghNo ratings yet
- Max Z 30x1+ 100x2: Thus The Objective Function IsDocument5 pagesMax Z 30x1+ 100x2: Thus The Objective Function IsShakeel BhellarNo ratings yet
- Sukanta Mandal - Hm-Hu601Document5 pagesSukanta Mandal - Hm-Hu601Sukanta MandalNo ratings yet
- Lab 3 OR Operations ResearchDocument15 pagesLab 3 OR Operations Researchbnzayd2005No ratings yet
- Haramaya University: College of Business and EconomicsDocument48 pagesHaramaya University: College of Business and EconomicsYG DENo ratings yet
- Mathematical Programming Solutions To Examples 4Document5 pagesMathematical Programming Solutions To Examples 4Ng Chun HiuNo ratings yet
- 3 methods LPP simplexDocument3 pages3 methods LPP simplexChandra HasanNo ratings yet
- Problem 1Document17 pagesProblem 1Roqaia AlwanNo ratings yet
- Sensivity LucDocument12 pagesSensivity LuchariwanfadhilNo ratings yet
- Dual Simplex Method for Linear Programming ProblemDocument7 pagesDual Simplex Method for Linear Programming ProblemRoqaia AlwanNo ratings yet
- L 7 Simplex Method Max. Numerical M COM IV 16-4-1Document10 pagesL 7 Simplex Method Max. Numerical M COM IV 16-4-1Ashish DeepNo ratings yet
- Math 308 Solutions To Conceptual Problems - Chapter 1Document3 pagesMath 308 Solutions To Conceptual Problems - Chapter 1Mehul JoshiNo ratings yet
- Degeneracy in Simplex Method: Z Value (+ve or - Ve Depending On The TypeDocument6 pagesDegeneracy in Simplex Method: Z Value (+ve or - Ve Depending On The Typesravanicharitha MamidiNo ratings yet
- American University of Ras Al Khaimah Operations Research (MEPM 531) Midterm Exam - Fall 2020Document14 pagesAmerican University of Ras Al Khaimah Operations Research (MEPM 531) Midterm Exam - Fall 2020Roqaia AlwanNo ratings yet
- Ridwan Pria Nugraha - Aljabar Linier - Tugas 14Document3 pagesRidwan Pria Nugraha - Aljabar Linier - Tugas 14Rahmat RamadhanNo ratings yet
- Lecture07 CaiDocument17 pagesLecture07 CaiWilliam Sin Chau WaiNo ratings yet
- Exam 2 Rev SOLDocument9 pagesExam 2 Rev SOLmexefon390No ratings yet
- Convert linear programming problem to standard form and find optimal solutionDocument3 pagesConvert linear programming problem to standard form and find optimal solutiondheerajgulati_31No ratings yet
- MTH601 Final Term Practice Question Solution Lecture 23 To 41Document25 pagesMTH601 Final Term Practice Question Solution Lecture 23 To 41komal gurriyaNo ratings yet
- Big M 121 C PDFDocument7 pagesBig M 121 C PDFhricha_20No ratings yet
- Problem Set 2.2 Continued... : R 2R +R, R 6R 9RDocument3 pagesProblem Set 2.2 Continued... : R 2R +R, R 6R 9RBook HouseNo ratings yet
- OQM Lecture Note - Part 4 Big-M Method and Two-Phase Simplex MethodDocument14 pagesOQM Lecture Note - Part 4 Big-M Method and Two-Phase Simplex MethoddanNo ratings yet
- Linear-Programming 101Document13 pagesLinear-Programming 101Rabin Bajagain.No ratings yet
- Invetigacion de OperacionesDocument18 pagesInvetigacion de OperacionesAmanda Herrera CermeñoNo ratings yet
- The Big M Method for Solving Linear Programming ProblemsDocument12 pagesThe Big M Method for Solving Linear Programming ProblemsAbhishek SinghNo ratings yet
- Simplex MethodDocument61 pagesSimplex MethodvasudhasinghNo ratings yet
- Chapter3 - LP Algebraic SolutionDocument5 pagesChapter3 - LP Algebraic Solutionabesmit1No ratings yet
- Linear Programming: Simplex MethodDocument14 pagesLinear Programming: Simplex MethodA Leela Prasad ReddyNo ratings yet
- MATH1231 - 1241 Test 1 AlgebraDocument28 pagesMATH1231 - 1241 Test 1 AlgebrajzdoogNo ratings yet
- Hca 1 LPP SolDocument15 pagesHca 1 LPP SolManish SinghNo ratings yet
- 1Document60 pages1Anika SharmaNo ratings yet
- Linear Programming Simplex 3 VariablesDocument1 pageLinear Programming Simplex 3 VariablesJosé LuisNo ratings yet
- Linear Algebra Homework 4Document3 pagesLinear Algebra Homework 4Bexultan MustafinNo ratings yet
- MB0032 OPERATION RESEARCH ASSIGNMENTDocument11 pagesMB0032 OPERATION RESEARCH ASSIGNMENTrajivkunal100% (1)
- Rerespent The Systems Below in State Space in Phase Variable Form. Draw The Signal - Flow GraphsDocument9 pagesRerespent The Systems Below in State Space in Phase Variable Form. Draw The Signal - Flow GraphsDuy KhánhNo ratings yet
- HW Assignment 2: Simplex Method For Solving LP and LINDO: TRAN-650 Urban Systems EngineeringDocument3 pagesHW Assignment 2: Simplex Method For Solving LP and LINDO: TRAN-650 Urban Systems EngineeringvamshiNo ratings yet
- Solutions of Homework 4Document11 pagesSolutions of Homework 4Архи́пNo ratings yet
- Simplex AnswerDocument31 pagesSimplex AnswerRishi Kesan DNo ratings yet
- Exam2 SolDocument3 pagesExam2 SolMuhammad Enam ul HaqNo ratings yet
- Revision For 20-21-UT2-SDocument3 pagesRevision For 20-21-UT2-SJendy WNo ratings yet
- MCD Gen Nle BCK ExactcubicDocument5 pagesMCD Gen Nle BCK Exactcubicapi-3777165No ratings yet
- Möbius Transformations Map Circles and LinesDocument17 pagesMöbius Transformations Map Circles and Linesap021No ratings yet
- Big M MethodDocument2 pagesBig M Methodkarthikeyabattula2005No ratings yet
- Module On Standard Scores and The Normal CurveDocument27 pagesModule On Standard Scores and The Normal CurveUniversal CollabNo ratings yet
- Introduction To Operations Research 10th Edition Fred Hillier Test Bank 1Document4 pagesIntroduction To Operations Research 10th Edition Fred Hillier Test Bank 1philip100% (55)
- LaplacetransDocument8 pagesLaplacetransAnonymous OrhjVLXO5sNo ratings yet
- Problem Set 1Document9 pagesProblem Set 1belderandover09No ratings yet
- Complex Analysis 1998Document24 pagesComplex Analysis 1998Suresh KannanNo ratings yet
- Matrices 6Document3 pagesMatrices 6Archana dekaNo ratings yet
- Graphical Method and Simplex MethodDocument61 pagesGraphical Method and Simplex MethodKaushik Reddy100% (1)
- Exam Operations ResearchDocument8 pagesExam Operations ResearchsaaNo ratings yet
- Question # 6:: 2 3 4 Max Z X X XDocument12 pagesQuestion # 6:: 2 3 4 Max Z X X XShakeel BhellarNo ratings yet
- Chap 3 SimplexDocument30 pagesChap 3 SimplexSylvia JingNo ratings yet
- Homework Set #1: ECE 382 Fall 2012Document6 pagesHomework Set #1: ECE 382 Fall 2012jamieha22No ratings yet
- 15ME81 or Module 2Document34 pages15ME81 or Module 2prashanth prabhu100% (1)
- m323 06Document15 pagesm323 06hariwanfadhilNo ratings yet
- OR Presentation - FinalDocument23 pagesOR Presentation - FinalNikita 19110190No ratings yet
- ChatcryptoDocument16 pagesChatcryptoKashif JameelNo ratings yet
- Radix and Bucket Sort NotesDocument4 pagesRadix and Bucket Sort NotesNinja WarriorNo ratings yet
- 2019 Bay Area Mathematical Olympiad (Grade 12) ExamDocument2 pages2019 Bay Area Mathematical Olympiad (Grade 12) ExamJohnvic AdiqueNo ratings yet
- Global Master's in Blockchain Technologies: Master's Degree by The IL3-Universitat de BarcelonaDocument4 pagesGlobal Master's in Blockchain Technologies: Master's Degree by The IL3-Universitat de BarcelonaAungsinghla MarmaNo ratings yet
- Configuration Management in Drupal 8 - DDD2016 PDFDocument57 pagesConfiguration Management in Drupal 8 - DDD2016 PDFUzielNo ratings yet
- Fiscalization Presentation 300723 DRCDocument16 pagesFiscalization Presentation 300723 DRCEBALENo ratings yet
- VSD - Altivar 310 - SchniederDocument13 pagesVSD - Altivar 310 - SchniederTengku MunzirNo ratings yet
- How To Create Crystal ReportsDocument4 pagesHow To Create Crystal ReportsYovin LekamgeNo ratings yet
- PMGSY Road Data ReportDocument5 pagesPMGSY Road Data Reportpitom sonamNo ratings yet
- DX DiagDocument31 pagesDX DiagJose Trix CamposNo ratings yet
- Final Report AcerDocument69 pagesFinal Report AcerSandeep Parkhe0% (1)
- The COVID-19 Pandemic Has Changed Education Forever. This Is HowDocument6 pagesThe COVID-19 Pandemic Has Changed Education Forever. This Is HowPandit Shubham TripathiNo ratings yet
- Construction of SLR Parsing Table PDFDocument22 pagesConstruction of SLR Parsing Table PDFavantika gaurNo ratings yet
- Assessment of VoIP E-Model Over 802.11 Wireless Mesh NetworkDocument5 pagesAssessment of VoIP E-Model Over 802.11 Wireless Mesh NetworkDwi PratiwiNo ratings yet
- 3ADR010582.Automation Builder 2.6.0Document6,710 pages3ADR010582.Automation Builder 2.6.0hoved20185No ratings yet
- Auction Script User View RegisterDocument9 pagesAuction Script User View RegisterEric PetersonNo ratings yet
- Logo Photoshop TutorialDocument4 pagesLogo Photoshop TutorialrvakenNo ratings yet
- Computer Fundamentals GuideDocument17 pagesComputer Fundamentals GuideMohit PacharNo ratings yet
- Service Manual: Home Audio SystemDocument38 pagesService Manual: Home Audio SystemSergio Hernandez GNo ratings yet
- Samsung AR12Document103 pagesSamsung AR12PauloNo ratings yet
- Datasheet of DS D5B55RB B Conference Flat Panel 20210917Document5 pagesDatasheet of DS D5B55RB B Conference Flat Panel 20210917Aziz Thierry COMPAORENo ratings yet
- Document (3) Eco CV PDFDocument4 pagesDocument (3) Eco CV PDFBilly Joe AspillagaNo ratings yet
- الجزائر الإجتماعية في عهد الدولة الرستمية - د. محمد بوركبةDocument456 pagesالجزائر الإجتماعية في عهد الدولة الرستمية - د. محمد بوركبةKawther YaNo ratings yet
- Ol Ict Past Paper 2018 EnglishDocument12 pagesOl Ict Past Paper 2018 Englishkamal hasanNo ratings yet
- Konica Minolta Firmware ListDocument16 pagesKonica Minolta Firmware ListYulian MisterioNo ratings yet
- Digital Display - FA MCR-D-TUI-UI-2REL-UP - 2907064: Key Commercial DataDocument7 pagesDigital Display - FA MCR-D-TUI-UI-2REL-UP - 2907064: Key Commercial DataBambang AmingNo ratings yet
- XDANTEQuickStartGuideDocument18 pagesXDANTEQuickStartGuidegebapoNo ratings yet
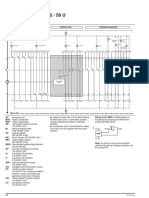
- Wiring Diagrams STR 18 M / 28 D / 38 S / 58 U: Masterpact: ConnectionDocument21 pagesWiring Diagrams STR 18 M / 28 D / 38 S / 58 U: Masterpact: ConnectionSidali KilardjNo ratings yet
- The Astral Plane Charles Leadbeater PDFDocument118 pagesThe Astral Plane Charles Leadbeater PDFdionysus999100% (1)
- Quality Management For Complaints From Customers (2FA - IN) : Test Script SAP S/4HANA - 08-05-20Document23 pagesQuality Management For Complaints From Customers (2FA - IN) : Test Script SAP S/4HANA - 08-05-20Subhadip GhoshNo ratings yet