You might also like
- A Single PDF File: EE 448 Midterm ExamDocument2 pagesA Single PDF File: EE 448 Midterm ExamEDGSXCNo ratings yet
- GM 13Document11 pagesGM 13cubillosnelsonNo ratings yet
- Signals and Systems: CE/EE301Document9 pagesSignals and Systems: CE/EE301Abdelrhman MahfouzNo ratings yet
- 微積分基本公式Document6 pages微積分基本公式enwei100% (6)
- Big Bang Theory jhuytttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttffffffffffffffffffffffffffffffxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxbbbbbbbbbbbbbbbbbbbbbdssssssssssssssssssssdmjkgfffffffffffffffffDocument32 pagesBig Bang Theory jhuytttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttttffffffffffffffffffffffffffffffxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxbbbbbbbbbbbbbbbbbbbbbdssssssssssssssssssssdmjkgfffffffffffffffffSwaraj PandaNo ratings yet
- Control Principles For Engineered Systems 5SMC0: State Reconstruction & Observer DesignDocument19 pagesControl Principles For Engineered Systems 5SMC0: State Reconstruction & Observer DesignJhonNo ratings yet
- MATLAB Egs01Document2 pagesMATLAB Egs01SAYALI100% (1)
- 7.half Range SeriesDocument9 pages7.half Range SeriesAtikah JNo ratings yet
- Assignmnet 02 RevisedDocument3 pagesAssignmnet 02 RevisedBilal Ayub100% (1)
- Applications of Laplace Transform Unit Step Functions and Dirac Delta FunctionsDocument8 pagesApplications of Laplace Transform Unit Step Functions and Dirac Delta FunctionsJASH MATHEWNo ratings yet
- Z TransformDocument28 pagesZ TransformmfchinNo ratings yet
- 1 Relativity - Physics NotesDocument67 pages1 Relativity - Physics NotesAmit KumarNo ratings yet
- Proakis ProblemsDocument4 pagesProakis ProblemsJoonsung Lee0% (1)
- Observers For Non-Linear SystemsDocument35 pagesObservers For Non-Linear SystemsdvnccbmacbtNo ratings yet
- EXPERIMENT 3A: FM Generation Using IC555 Prelab Report: Group #8Document5 pagesEXPERIMENT 3A: FM Generation Using IC555 Prelab Report: Group #8Sanjeev DidelNo ratings yet
- State SpaceDocument20 pagesState SpacepattanayaksuchiNo ratings yet
- Solution of State Space EquationDocument11 pagesSolution of State Space EquationAnirban MitraNo ratings yet
- Time Response AnalysisDocument51 pagesTime Response AnalysisAbdulrahmanNo ratings yet
- Controllability and Observability of Nonlinear Systems: Key PointsDocument22 pagesControllability and Observability of Nonlinear Systems: Key PointsHelios5993No ratings yet
- Grand Canonical EnsembleDocument10 pagesGrand Canonical EnsembleDanny WebbNo ratings yet
- Assignment 04 Power ElectronicsDocument3 pagesAssignment 04 Power ElectronicsTayyab Hussain0% (1)
- Kramers Kronig en MatlabDocument25 pagesKramers Kronig en MatlabLetalis IraNo ratings yet
- 3-Gauss Elimination MethodDocument12 pages3-Gauss Elimination MethodsirfmeinNo ratings yet
- Matrix ExponentialDocument14 pagesMatrix Exponentialvignesh0617No ratings yet
- Dynamical Systems: An LTCC CourseDocument53 pagesDynamical Systems: An LTCC CourseRoy VeseyNo ratings yet
- Modelling of Grid-Connected Geared 2MW PMSG Wind Turbine GeneratorDocument88 pagesModelling of Grid-Connected Geared 2MW PMSG Wind Turbine GeneratorDao Van ManhNo ratings yet
- Xppaut NotesDocument8 pagesXppaut Notescalvk79No ratings yet
- Nonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiDocument19 pagesNonlinear Control, Supplementary Notes To Khalil's Nonlinear Systems - Rafael WisniewskiMustafa KösemNo ratings yet
- Optimal Control of Switching Times in Switched Dynamical SystemsDocument6 pagesOptimal Control of Switching Times in Switched Dynamical SystemsAbbas AbbasiNo ratings yet
- CH 13Document19 pagesCH 13Eufemio MorenoNo ratings yet
- Sinusoidal Steady StateDocument7 pagesSinusoidal Steady StateMalcolmNo ratings yet
- Linear PdeDocument23 pagesLinear PdeA SinghNo ratings yet
- Cap8 Ulaby SolutionsDocument25 pagesCap8 Ulaby SolutionsMatheus Lima0% (1)
- Linear Algebra and Numerical AnalysisDocument10 pagesLinear Algebra and Numerical AnalysisDinesh ReddyNo ratings yet
- 263 HomeworkDocument153 pages263 HomeworkHimanshu Saikia JNo ratings yet
- Common Nonlinearities and Describing FunctionsDocument16 pagesCommon Nonlinearities and Describing FunctionsMona AliNo ratings yet
- Linear Control Systems Lecture # 8 Observability & Discrete-Time SystemsDocument25 pagesLinear Control Systems Lecture # 8 Observability & Discrete-Time SystemsRavi VermaNo ratings yet
- Fourier AnalysisDocument79 pagesFourier AnalysisRajkumarNo ratings yet
- NPTEL - Curso de Proteção de SistemasDocument321 pagesNPTEL - Curso de Proteção de SistemasGianey Fernandes da SilvaNo ratings yet
- Math: 2107: Partial Differential Equations (Pdes)Document25 pagesMath: 2107: Partial Differential Equations (Pdes)RafeulNo ratings yet
- Angular Momentum University of Notre DameDocument25 pagesAngular Momentum University of Notre DameLam Sin WingNo ratings yet
- Complex Variables: Question and AnswereDocument15 pagesComplex Variables: Question and AnswereveerendraNo ratings yet
- 4Document16 pages4DAVIDNo ratings yet
- Signals and Systems: CE/EE301Document9 pagesSignals and Systems: CE/EE301Abdelrhman MahfouzNo ratings yet
- Signals and System Chapter 1 1Document20 pagesSignals and System Chapter 1 1Abdelrhman MahfouzNo ratings yet
- Fourier Transform and SeriesDocument2 pagesFourier Transform and SeriesAbhidudeNo ratings yet
- Ee263 Ps1 SolDocument11 pagesEe263 Ps1 SolMorokot AngelaNo ratings yet
- Introduction To Numerical Electrostatics Using MATLABDocument2 pagesIntroduction To Numerical Electrostatics Using MATLABrxavierva0% (1)
- Lecture 4 Maximum PrincipleDocument21 pagesLecture 4 Maximum Principlemohamed-gamaaNo ratings yet
- Signals and Systems: CE/EE301Document16 pagesSignals and Systems: CE/EE301Abdelrhman MahfouzNo ratings yet
- Quantum Mechanics Homework 8Document2 pagesQuantum Mechanics Homework 8Oscar100% (1)
- 1 LMI's and The LMI ToolboxDocument4 pages1 LMI's and The LMI Toolboxkhbv0% (1)
- Matlab and Simulink For Modeling and Control DC MotorDocument14 pagesMatlab and Simulink For Modeling and Control DC MotorGhaleb AlzubairiNo ratings yet
- Laplace Transform ExamplesDocument19 pagesLaplace Transform Exampleshamza abdo mohamoudNo ratings yet
- Control Systems Resource SheetDocument12 pagesControl Systems Resource SheetCharlie Ho SiNo ratings yet
- Control Sol GA PDFDocument342 pagesControl Sol GA PDFRishabh ShuklaNo ratings yet
- BOOK4 PsDocument128 pagesBOOK4 Psgoyo2kNo ratings yet
- Observer DesignDocument20 pagesObserver DesignRamaDinakaranNo ratings yet
- Ordinary Differential Equations: 1971 NRL—MRC ConferenceFrom EverandOrdinary Differential Equations: 1971 NRL—MRC ConferenceLeonard WeissNo ratings yet
- Dynamical Systems Method for Solving Nonlinear Operator EquationsFrom EverandDynamical Systems Method for Solving Nonlinear Operator EquationsRating: 5 out of 5 stars5/5 (1)
- 6.003: Signals and Systems-Fall 2002Document10 pages6.003: Signals and Systems-Fall 2002samsritiNo ratings yet
- Topic:Signals, Classification of Signals, Basic Signals..: Electrical DepartmentDocument22 pagesTopic:Signals, Classification of Signals, Basic Signals..: Electrical Departmentrajalakshmi boopathiNo ratings yet
- Detailed Notes: IC Fabrication ProcessDocument81 pagesDetailed Notes: IC Fabrication ProcessimmadiuttejNo ratings yet
- Lecture Note 420507181042070Document127 pagesLecture Note 420507181042070immadiuttejNo ratings yet
- Types of VulnerabiltyDocument2 pagesTypes of VulnerabiltyimmadiuttejNo ratings yet
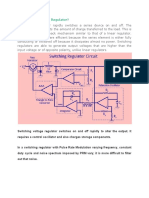
- What Is A Switching Regulator?Document2 pagesWhat Is A Switching Regulator?immadiuttejNo ratings yet
- Electrical Machines-I Question BankDocument12 pagesElectrical Machines-I Question BankimmadiuttejNo ratings yet
- Slave's DreamDocument2 pagesSlave's DreamimmadiuttejNo ratings yet
- A Few Great Personalities of INDIADocument1 pageA Few Great Personalities of INDIAimmadiuttejNo ratings yet
- Parameter Conversion For Two Port NetworksDocument1 pageParameter Conversion For Two Port Networksimmadiuttej50% (2)
- Spectrum and Energy Level ExerciseDocument6 pagesSpectrum and Energy Level ExerciseJjrlNo ratings yet
- Nav Test For CPL CandidatesDocument8 pagesNav Test For CPL CandidatesVivek BaskarNo ratings yet
- Theory of MachineDocument16 pagesTheory of MachinePubg KingNo ratings yet
- CH 22Document32 pagesCH 22هشام المالكيNo ratings yet
- 1 Properties of GasesDocument4 pages1 Properties of GasesCris CorsinoNo ratings yet
- Wps Smaw3g Smaw B-U2 (Vacio)Document1 pageWps Smaw3g Smaw B-U2 (Vacio)Richard Gonzales CapchiNo ratings yet
- Reiners Et Al. - 1994 - Decorative Optical CoatingsDocument8 pagesReiners Et Al. - 1994 - Decorative Optical Coatingschinuuu85brNo ratings yet
- QMMM Tutorial Ws10 11Document36 pagesQMMM Tutorial Ws10 11weilaiNo ratings yet
- Chapter 8 (Rotational Motion)Document37 pagesChapter 8 (Rotational Motion)Mehwish IsrarNo ratings yet
- By Ian StewartDocument1 pageBy Ian Stewartapi-26217250No ratings yet
- S 5Document2 pagesS 5Neethu Krishna KNo ratings yet
- Sample Quiz For LACAS 9THDocument4 pagesSample Quiz For LACAS 9THShehbaz YaseenNo ratings yet
- Energy, Work, Power and Momentum ReviewDocument7 pagesEnergy, Work, Power and Momentum ReviewJACOB SANCHEZNo ratings yet
- Chemistry Full Book Short QuestionsDocument31 pagesChemistry Full Book Short QuestionsOwais MaqboolNo ratings yet
- Chapter 3 - Materials Science Crystal StructuresDocument51 pagesChapter 3 - Materials Science Crystal Structurestjipotjipi mungundaNo ratings yet
- MATHDocument30 pagesMATHandreyou99No ratings yet
- Conic Sections - A Figure Formed by The Intersection of A Plane and A RightDocument8 pagesConic Sections - A Figure Formed by The Intersection of A Plane and A RightKenneth Anrie MoralNo ratings yet
- Fishing JarsDocument29 pagesFishing JarsAlexander Bohórquez MartínezNo ratings yet
- Chemistry STPM Semester 2 Group 2Document12 pagesChemistry STPM Semester 2 Group 2Chong Yin Ping100% (1)
- ME5720Chap4 w11Document79 pagesME5720Chap4 w11tareNo ratings yet
- Autocostruzione NVIS Antenna PDFDocument7 pagesAutocostruzione NVIS Antenna PDFjohnnibigNo ratings yet
- OCW SKAA1213 08 Kinematic of Particles 2Document58 pagesOCW SKAA1213 08 Kinematic of Particles 2Akan OkpoNo ratings yet
- Chapter 2 - Ideal Flow Theory PDFDocument51 pagesChapter 2 - Ideal Flow Theory PDFSanthoshinii RamalingamNo ratings yet
- Carrasco-Pancorbo 2005-Review PDFDocument22 pagesCarrasco-Pancorbo 2005-Review PDFRodrigo PinheiroNo ratings yet
- 546 - MT-B3-103-01-1503 Rev 3Document13 pages546 - MT-B3-103-01-1503 Rev 3GIOVANNINo ratings yet
- M2 All Solomon PapersDocument26 pagesM2 All Solomon Papersprofitmaker_2No ratings yet
- 131 - Physics 1Document4 pages131 - Physics 1nassorussi9No ratings yet