You might also like
- ADELE - 25 SongbookDocument67 pagesADELE - 25 SongbookJamie SimpsonNo ratings yet
- Barcelona Tiki-Taka Domination v2 4-3-2-1Document13 pagesBarcelona Tiki-Taka Domination v2 4-3-2-1wawan_291289No ratings yet
- Positional Play by Filipe TelesDocument31 pagesPositional Play by Filipe TelesViệt Anh Trần67% (3)
- Coaching Team Tacticsfor U1112Document6 pagesCoaching Team Tacticsfor U1112R. O.100% (1)
- Shadowrun Book ListDocument1 pageShadowrun Book ListLorkhonNo ratings yet
- Stretch Outside Zone RunDocument17 pagesStretch Outside Zone RunRoberto Matta100% (2)
- X&Os Stretch ResearchDocument17 pagesX&Os Stretch ResearchcoachrjiNo ratings yet
- Roberto Mancini Training-TacticsDocument9 pagesRoberto Mancini Training-Tacticsapi-83605395No ratings yet
- Concept Soccer : A Step by Step Method to Score Goals and Develop PlayersFrom EverandConcept Soccer : A Step by Step Method to Score Goals and Develop PlayersNo ratings yet
- 2002 Honda Odyssey LIBRO de DiagramasDocument83 pages2002 Honda Odyssey LIBRO de DiagramasA-t Hector50% (2)
- Tactical Movement PrinciplesDocument28 pagesTactical Movement PrinciplesEkrem Aker100% (1)
- Running CasingDocument6 pagesRunning CasingAbdul Hameed OmarNo ratings yet
- Positional Play The - Modern Philosophy of PositionalDocument97 pagesPositional Play The - Modern Philosophy of PositionalRafael LeiteNo ratings yet
- Chelsea Development Centre SessionsDocument77 pagesChelsea Development Centre SessionsEkrem AkerNo ratings yet
- Chelsea Development Centre SessionsDocument77 pagesChelsea Development Centre SessionsEkrem AkerNo ratings yet
- FCBEscola Coaches Seminar - Day 2Document11 pagesFCBEscola Coaches Seminar - Day 2cbales9967% (3)
- FC Barca Tactic To Combination Play PracticesDocument4 pagesFC Barca Tactic To Combination Play PracticesDamon CopelandNo ratings yet
- Sir Alex Ferguson SessionsDocument3 pagesSir Alex Ferguson Sessionsicsabmo100% (1)
- Calisthenics Hypertrophy Push/PullDocument2 pagesCalisthenics Hypertrophy Push/PullManvith ReddyNo ratings yet
- hPVKlRFKQV22TBgb9xPe - U12-U16 Line-Breaking PassingDocument8 pageshPVKlRFKQV22TBgb9xPe - U12-U16 Line-Breaking PassingEkrem AkerNo ratings yet
- Full Switching Play SessionDocument6 pagesFull Switching Play SessionLucian Nicolau75% (4)
- Enhanced Football Intelligence FRDocument14 pagesEnhanced Football Intelligence FRmohamed belahouelNo ratings yet
- Principles of The Positional PlayDocument34 pagesPrinciples of The Positional PlayTharun Murugesan100% (23)
- FC Barca Tactic To Combination Play Practices PDFDocument4 pagesFC Barca Tactic To Combination Play Practices PDFPaulsonPaul100% (1)
- How To Improve Your Soccer Team Players - Elite Book For Elite PlayerFrom EverandHow To Improve Your Soccer Team Players - Elite Book For Elite PlayerNo ratings yet
- Positional Data in FootballDocument25 pagesPositional Data in FootballHugo FerreiraNo ratings yet
- General Concepts of Positional PlayDocument4 pagesGeneral Concepts of Positional PlaySheikh MohdNo ratings yet
- Complex Build-Ups Lead To Simple Football PDFDocument20 pagesComplex Build-Ups Lead To Simple Football PDFEdouard LiangNo ratings yet
- Basketball Strategy 101Document15 pagesBasketball Strategy 101Lucy Amparo Jaimes100% (1)
- Developing A Pressing Mentality: Presented byDocument10 pagesDeveloping A Pressing Mentality: Presented byEkrem Aker0% (1)
- Mythbusting Set-Pieces in Soccer: An Attribute-Driven ApproachDocument12 pagesMythbusting Set-Pieces in Soccer: An Attribute-Driven ApproachTewfic Seid100% (1)
- Test 5Document3 pagesTest 5Helal UddinNo ratings yet
- Asean Quiz 51Document8 pagesAsean Quiz 51Kru Ekachai100% (2)
- FC Barcelona Midfield Driving RunsDocument3 pagesFC Barcelona Midfield Driving RunsToni Ocaña Fernández100% (1)
- How To Retrofit Cruise Control in New BeetleDocument17 pagesHow To Retrofit Cruise Control in New Beetleh0m3s1ckNo ratings yet
- Examen de 4º Eso Final Ingles PDFDocument4 pagesExamen de 4º Eso Final Ingles PDFsam kadadoNo ratings yet
- Palla 2019 Trading Places GKDocument11 pagesPalla 2019 Trading Places GKMassimo ArteconiNo ratings yet
- 6-2. SSAC15-RP-Finalist-Quality-vs-QuantityDocument9 pages6-2. SSAC15-RP-Finalist-Quality-vs-QuantitySaloni PatilNo ratings yet
- Quantitative Observation Tools To Analyse Soccer. Greghaigne e FernandezDocument10 pagesQuantitative Observation Tools To Analyse Soccer. Greghaigne e FernandezGibson Moreira PraçaNo ratings yet
- Quantifying The Value of Sprints in Elite Football Usi - 2020 - Chaos SolitonsDocument11 pagesQuantifying The Value of Sprints in Elite Football Usi - 2020 - Chaos SolitonsKaan TopçuNo ratings yet
- Expansive Football - The Second PhaseDocument3 pagesExpansive Football - The Second PhaseAlexis DavidNo ratings yet
- Analysing Coordination Patterns in SoccerDocument27 pagesAnalysing Coordination Patterns in SoccerLuisNo ratings yet
- Qualitative AnalysisDocument10 pagesQualitative AnalysisDiego SañudoNo ratings yet
- The Role of The Player Demarcation in Order To Increase The Efficiency in The Strike Football Game at The Level of Junior PlayersDocument6 pagesThe Role of The Player Demarcation in Order To Increase The Efficiency in The Strike Football Game at The Level of Junior PlayersPopa MariaNo ratings yet
- Space_and_Control_in_Soccer (1)Document13 pagesSpace_and_Control_in_Soccer (1)IsmailNo ratings yet
- Pirlo Thesis 2020 - EN TranslationDocument17 pagesPirlo Thesis 2020 - EN Translationckh1628No ratings yet
- Analysis of Possessions For Carthage SoccerDocument12 pagesAnalysis of Possessions For Carthage Soccerapi-709193121No ratings yet
- COACHDOGGE Assist Locations Study PDFDocument15 pagesCOACHDOGGE Assist Locations Study PDFChristoffer KarlssonNo ratings yet
- Data Driven GhostingDocument15 pagesData Driven GhostingIvan GarciaNo ratings yet
- The Role of Data Analytics in Modern Day SportsDocument6 pagesThe Role of Data Analytics in Modern Day SportsSarthak BatraNo ratings yet
- Football Performance Analysis Dissertation IdeasDocument8 pagesFootball Performance Analysis Dissertation IdeasPaperWritingServiceCollegeSingapore100% (1)
- Is It Worth The Effort Understanding and ContextuaDocument17 pagesIs It Worth The Effort Understanding and ContextuaFranco EspinaNo ratings yet
- Va of PressingDocument50 pagesVa of PressingJose Alberto Cruz SánchezNo ratings yet
- Dobreff MLSA19Document11 pagesDobreff MLSA19Christy BinuNo ratings yet
- Should You Park The Bus?: Tianyu Guan, Jiguo Cao and Tim B. SwartzDocument17 pagesShould You Park The Bus?: Tianyu Guan, Jiguo Cao and Tim B. SwartzgeronimobaonaNo ratings yet
- Documentos de Trabajo: Universidad Del Cema Buenos Aires ArgentinaDocument32 pagesDocumentos de Trabajo: Universidad Del Cema Buenos Aires Argentinaserafo147No ratings yet
- Quantifying Decision MakingDocument26 pagesQuantifying Decision MakingNorman de SilvaNo ratings yet
- Towards A League-Independent Qualitative Soccer Theory For RobocupDocument22 pagesTowards A League-Independent Qualitative Soccer Theory For RobocupMarijan KaroglanNo ratings yet
- Beyond Expected Goals: 2018 Research Papers Competition Presented byDocument17 pagesBeyond Expected Goals: 2018 Research Papers Competition Presented byNahuel RosamiliaNo ratings yet
- U.S. Soccer Candidate Recommended Reading The Progression From 4v4 To 11v11Document6 pagesU.S. Soccer Candidate Recommended Reading The Progression From 4v4 To 11v11Bigdan StrigoiNo ratings yet
- How Possession Play Influences Defensive Transition - Tactical AnalysisDocument2 pagesHow Possession Play Influences Defensive Transition - Tactical AnalysisAhmed DaibecheNo ratings yet
- Spatial Dynamics of Team SportsDocument8 pagesSpatial Dynamics of Team SportsMartin GriffinNo ratings yet
- Print: Warm Up Session Developments Game Situation Warm Down 10 Minutes 10 Minutes 15 Minutes 15 Minutes 10 MinutesDocument4 pagesPrint: Warm Up Session Developments Game Situation Warm Down 10 Minutes 10 Minutes 15 Minutes 15 Minutes 10 MinutesNAYIM OZNAIMNo ratings yet
- Tactical Analysis Through Objective Data in FootbaDocument15 pagesTactical Analysis Through Objective Data in FootbaMakisKingSamiotisNo ratings yet
- Scoring from Pull-Back CrossesDocument7 pagesScoring from Pull-Back CrossesNAYIM OZNAIM100% (1)
- Soccer Stories 2Document10 pagesSoccer Stories 2Diego SañudoNo ratings yet
- Messi Project DraftDocument5 pagesMessi Project DraftCARNo ratings yet
- New Indicator For Centrality Measurements in Passing-Network Analysis of SoccerDocument8 pagesNew Indicator For Centrality Measurements in Passing-Network Analysis of SoccerDavid CZNo ratings yet
- Always Think Before ComputingDocument11 pagesAlways Think Before ComputingAdrián Rodríguez SáezNo ratings yet
- KEY WORDS: Soccer, Computational Tracking, Technical Actions, Shots To Goal StrategiesDocument4 pagesKEY WORDS: Soccer, Computational Tracking, Technical Actions, Shots To Goal Strategiesikhlas sadiminnNo ratings yet
- Distinguishing Between Roles of Football Players in Play-By-Play Match Event DataDocument12 pagesDistinguishing Between Roles of Football Players in Play-By-Play Match Event Datahwykvycjs8No ratings yet
- The Mathematics Behind Football and How It Influences The Beautiful GameDocument4 pagesThe Mathematics Behind Football and How It Influences The Beautiful Gamerameshgouda1tNo ratings yet
- Decroos Mlsa17Document10 pagesDecroos Mlsa17Nutrilight SinopNo ratings yet
- Analisis Del Espacio de Interaccion en El FutbolDocument10 pagesAnalisis Del Espacio de Interaccion en El FutbolJuan EstebanNo ratings yet
- Arrigo Sacchi - 1442Document26 pagesArrigo Sacchi - 1442Ekrem AkerNo ratings yet
- 8 Drills Every Training Session Needs1 PDFDocument11 pages8 Drills Every Training Session Needs1 PDFmk78_inNo ratings yet
- Blank 2-1Document24 pagesBlank 2-1luchotheilerNo ratings yet
- 4 vs. 4 GamesDocument38 pages4 vs. 4 GamesAlFrancisOngariusNo ratings yet
- MOON Protocol ACLDocument10 pagesMOON Protocol ACLthclaessNo ratings yet
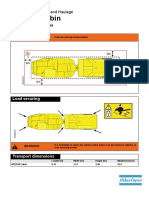
- 9852 2654 01 Transport Instructions MT2010 CabinDocument2 pages9852 2654 01 Transport Instructions MT2010 CabinIH Medrano100% (1)
- DAV Public School Book ReviewDocument4 pagesDAV Public School Book ReviewHarshvardhan S. KantimahanthiNo ratings yet
- #71 August 2016Document68 pages#71 August 2016OutdoorUAENo ratings yet
- Basketball Graphic OrganizerDocument1 pageBasketball Graphic OrganizerRyg JosolNo ratings yet
- BIOL 2420 Body Fluids and Electrolytes Worksheet - KeyDocument3 pagesBIOL 2420 Body Fluids and Electrolytes Worksheet - Keyrick100% (1)
- Myferrari - Ferrari F8 Tributo - Y386rreDocument12 pagesMyferrari - Ferrari F8 Tributo - Y386rrejcNo ratings yet
- VW V12.0 enDocument7 pagesVW V12.0 enwatt tngchaiNo ratings yet
- ProsthesisDocument52 pagesProsthesisVijay MgNo ratings yet
- TD5 - PhelpsDocument13 pagesTD5 - Phelpseco.achat10No ratings yet
- Moldings and Clip KitsDocument53 pagesMoldings and Clip KitsZé MirtoNo ratings yet
- Candidate Email Mobile List2022Document11 pagesCandidate Email Mobile List2022POS-ADSR TrackingNo ratings yet
- Ork RosterDocument3 pagesOrk RosterDaniel Aaron MeeksNo ratings yet
- Dark Sun RQ Lite GuideDocument16 pagesDark Sun RQ Lite GuideRagnir0% (1)
- Dead Leg (Quadriceps Contusion)Document12 pagesDead Leg (Quadriceps Contusion)sanalcrazyNo ratings yet
- Supplement of Safety Catalog MARCH, 2007: Toyota Ball Joint Stock No. Oe Number Car Name Model Year PositionDocument36 pagesSupplement of Safety Catalog MARCH, 2007: Toyota Ball Joint Stock No. Oe Number Car Name Model Year PositionВалерий ГерасимовNo ratings yet
- Midtem Genap 2019-2020Document3 pagesMidtem Genap 2019-2020Sindi SindiNo ratings yet
- Fi TV Select Channel Lineup-Spanish-Web - Final - 020321Document2 pagesFi TV Select Channel Lineup-Spanish-Web - Final - 020321Yesi OlivaNo ratings yet
- DD EPA04S60 ActuatorturboDocument5 pagesDD EPA04S60 ActuatorturboCuong DinhNo ratings yet
- 2022 Silver Fern Rally Rally Guide Supplementary Regulations Part 1 V1Document10 pages2022 Silver Fern Rally Rally Guide Supplementary Regulations Part 1 V1Neville BryantNo ratings yet
- Team 5 Semana 7Document3 pagesTeam 5 Semana 7Jackelin Jhessabel Quino MenesesNo ratings yet