You might also like
- Design of ReservoirDocument40 pagesDesign of Reservoirasingh400No ratings yet
- Test Bank For Principles and Applications of Assessment in Counseling 5th Edition WhistonDocument24 pagesTest Bank For Principles and Applications of Assessment in Counseling 5th Edition WhistonSaraSmithcftj100% (36)
- Buckling Restrained BracesDocument8 pagesBuckling Restrained BracesZaher Mhd SharafNo ratings yet
- Bearing Design PDFDocument3 pagesBearing Design PDFSushmit SharmaNo ratings yet
- Phy NeetDocument308 pagesPhy NeetSona Jithin100% (2)
- Chapter 1 Physical Quantities and UnitsDocument18 pagesChapter 1 Physical Quantities and UnitsJustice WongNo ratings yet
- Dr. Firas K. AL-Zuhairi E-Mail: 150009@uotechnology - Edu.iq: Engineering MechanicsDocument28 pagesDr. Firas K. AL-Zuhairi E-Mail: 150009@uotechnology - Edu.iq: Engineering Mechanicsحسين راشد عيسى كريمNo ratings yet
- Solid State Calculations Using WIEN2kDocument15 pagesSolid State Calculations Using WIEN2kabu_dzulfiqar5528100% (1)
- Fem 9.341Document6 pagesFem 9.341rafael1978No ratings yet
- Chap I - StaticsDocument37 pagesChap I - StaticsEnas Al-khawaldehNo ratings yet
- ME1222 - 2. Statistics of ParticleDocument44 pagesME1222 - 2. Statistics of Particle40-eng-0003No ratings yet
- 2021 National Recovery ATP: Grade 11 Term 1:: Physical SciencesDocument7 pages2021 National Recovery ATP: Grade 11 Term 1:: Physical SciencesFelicityNo ratings yet
- 01-ES202 - Topic1Document18 pages01-ES202 - Topic1Moguri OwowNo ratings yet
- Lecture 1 To 4 Courseware Forces To 3D Particle Equlib PDFDocument24 pagesLecture 1 To 4 Courseware Forces To 3D Particle Equlib PDFOMARNo ratings yet
- Y12 SacDocument2 pagesY12 SacDani AdonaiNo ratings yet
- Force Vectors: Engineering Mechanics-Statics-First Year-Civil EngineeringDocument8 pagesForce Vectors: Engineering Mechanics-Statics-First Year-Civil EngineeringAhmed NasratNo ratings yet
- Ch02 - Statics of Particles - Part 1Document18 pagesCh02 - Statics of Particles - Part 1Ahmed AliNo ratings yet
- J. N. Reddy - 2022 - Tridynamic Model of The Beam With Transverse Shear DeformationDocument20 pagesJ. N. Reddy - 2022 - Tridynamic Model of The Beam With Transverse Shear DeformationSevim GüçlüNo ratings yet
- Engineering Mechanics IDocument57 pagesEngineering Mechanics IsouhailNo ratings yet
- Expectation Values of Coherent States For SU (2) Lattice Gauge TheoriesDocument21 pagesExpectation Values of Coherent States For SU (2) Lattice Gauge TheoriesM Saad Maqbool D.P.No ratings yet
- Chapter IDocument12 pagesChapter InvnrevNo ratings yet
- Electromagnetic Field TheoryDocument77 pagesElectromagnetic Field TheoryashjunghareNo ratings yet
- Syllabus For CT-2Document1 pageSyllabus For CT-2Sakshi PrajapatiNo ratings yet
- Predictions For Energy Correlators Probing Substructure of Groomed Heavy Quark JetsDocument51 pagesPredictions For Energy Correlators Probing Substructure of Groomed Heavy Quark JetsGaston GBNo ratings yet
- 1.530 ATP 2023-24 GR 11 Phys Sci FinalDocument7 pages1.530 ATP 2023-24 GR 11 Phys Sci FinalPrecious ZithaNo ratings yet
- Ge8292 - Engineering MechanicsDocument23 pagesGe8292 - Engineering MechanicsparthibankNo ratings yet
- Dimensional AnalysisDocument36 pagesDimensional Analysisadeogun kehindeNo ratings yet
- Frequency Study of Single-Walled Carbon Nanotubes Based On A Space-Frame Model With Flexible ConnectionsDocument6 pagesFrequency Study of Single-Walled Carbon Nanotubes Based On A Space-Frame Model With Flexible Connectionskishorebondada78No ratings yet
- A Coordinate Bethe Ansatz Approach To The CalculatDocument17 pagesA Coordinate Bethe Ansatz Approach To The CalculatToon PillaertNo ratings yet
- 2024 KZN PHSC Grade 11 Atp (Final)Document7 pages2024 KZN PHSC Grade 11 Atp (Final)Cheryl LewisNo ratings yet
- KZN ATP Physical Science GRADE 11 2024Document7 pagesKZN ATP Physical Science GRADE 11 2024mfekamelokuhle8No ratings yet
- Engg MechanicsDocument3 pagesEngg Mechanicssuchith reddy arukalaNo ratings yet
- Approaches For The Calculation of Rayleigh Damping Coefficients For A Time-History AnalysisDocument11 pagesApproaches For The Calculation of Rayleigh Damping Coefficients For A Time-History AnalysisHamzah Al-HashemiNo ratings yet
- University of Engineering and Technology Lahore: Department: Mechanical Engineering Section Course Outline ReportDocument2 pagesUniversity of Engineering and Technology Lahore: Department: Mechanical Engineering Section Course Outline ReportMUHAMMAD HAMZANo ratings yet
- A High Performance Scaled Boundary Finite Element MethodDocument11 pagesA High Performance Scaled Boundary Finite Element Method齐鸳No ratings yet
- EmtDocument13 pagesEmtAnonymous VASS3z0wTHNo ratings yet
- Supplementary Notes For MIT's Quantum Theory SequenceDocument30 pagesSupplementary Notes For MIT's Quantum Theory SequenceBilgehan Barış ÖNERNo ratings yet
- Comparative Analysis of Edge-And Broadside - Coupled Split Ring Resonators For Metamaterial Design-Theory and ExperimentsDocument10 pagesComparative Analysis of Edge-And Broadside - Coupled Split Ring Resonators For Metamaterial Design-Theory and ExperimentsVaibhav PatelNo ratings yet
- Molecular Dynamics SimulationDocument49 pagesMolecular Dynamics SimulationredaelwanNo ratings yet
- Two-Body Neutral Coulomb System in A Magnetic FieldDocument51 pagesTwo-Body Neutral Coulomb System in A Magnetic FieldSvetlana BugasovaNo ratings yet
- Module-1: Tensor Algebra: Lecture-1: Introduction To Continuum MechanicsDocument3 pagesModule-1: Tensor Algebra: Lecture-1: Introduction To Continuum MechanicsroysiddarthNo ratings yet
- Magneto HydrodynamicsDocument32 pagesMagneto HydrodynamicsNitin PooniaNo ratings yet
- JCAMECH953831704141000Document16 pagesJCAMECH953831704141000xangNo ratings yet
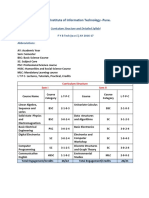
- IIITP - FYBTech - Curriculum - Structure& Syllabus PDFDocument29 pagesIIITP - FYBTech - Curriculum - Structure& Syllabus PDFDeepBhaleraoNo ratings yet
- IIITP FYBTech Curriculum Structure& SyllabusDocument29 pagesIIITP FYBTech Curriculum Structure& SyllabusshaileshvcNo ratings yet
- Equivalent Beams For Carbon Nanotubes: P. Papanikos, D.D. Nikolopoulos, K.I. TserpesDocument8 pagesEquivalent Beams For Carbon Nanotubes: P. Papanikos, D.D. Nikolopoulos, K.I. TserpesJhuliani CristinaNo ratings yet
- Bmee201l Engineering-Mechanics TH 1.0 65 Bmee201lDocument3 pagesBmee201l Engineering-Mechanics TH 1.0 65 Bmee201lXCALIBUR 11216No ratings yet
- Chapter 1Document7 pagesChapter 1Gizachew MulatieNo ratings yet
- 2010 Solving Quasi Static Equations With The Material Point MethodDocument20 pages2010 Solving Quasi Static Equations With The Material Point MethodSafi Ur RehmanNo ratings yet
- Basic Concepts On StaticsDocument6 pagesBasic Concepts On Staticsmzairun100% (2)
- Quick Revision Mechanics XI 2014Document29 pagesQuick Revision Mechanics XI 2014Pavitar KhatriNo ratings yet
- Christian K. Jespersen, Johann B. Severin, Charles L. Steinhardt, Jonas Vinther, Johan P. U. Fynbo, Jonatan Selsing, Darach WatsonDocument7 pagesChristian K. Jespersen, Johann B. Severin, Charles L. Steinhardt, Jonas Vinther, Johan P. U. Fynbo, Jonatan Selsing, Darach WatsonPeter Daniel JohannsenNo ratings yet
- Lecture 2 - Scalars and Vectors Vector Addition Using Triangle Law and Parallelogram Law For AdditionDocument18 pagesLecture 2 - Scalars and Vectors Vector Addition Using Triangle Law and Parallelogram Law For AdditionNasrullah AwalNo ratings yet
- MEE214 แผนการเรียนDocument3 pagesMEE214 แผนการเรียนT KongcharoenNo ratings yet
- 0263 8231 (84) 90004 1 PDFDocument22 pages0263 8231 (84) 90004 1 PDFjuan carlos molano toroNo ratings yet
- Martys Book1 Ps PsDocument12 pagesMartys Book1 Ps PsmatbalNo ratings yet
- PHYSICS Alevel AQA 7407 Unit 4 Mechanics and MaterialsDocument41 pagesPHYSICS Alevel AQA 7407 Unit 4 Mechanics and MaterialsValentina R. RusevaNo ratings yet
- A Note On The Geometry of The Quantum StatesDocument15 pagesA Note On The Geometry of The Quantum StatescxhbrbshjfNo ratings yet
- Dixit 2021 J. Phys. Conf. Ser. 2122 012007Document7 pagesDixit 2021 J. Phys. Conf. Ser. 2122 012007SaunakDuttaNo ratings yet
- Theoretical Behavior of HSC Sections Under TorsionDocument13 pagesTheoretical Behavior of HSC Sections Under TorsionsokamantyNo ratings yet
- Lattice QCD ThesisDocument5 pagesLattice QCD Thesisgj9cpzxs100% (2)
- IJSSD 2020 FinalDocument25 pagesIJSSD 2020 FinalWooram KimNo ratings yet
- Partial CoursewareDocument25 pagesPartial CoursewareOMARNo ratings yet
- Me A Chapter and 2Document71 pagesMe A Chapter and 2Coskun OzalpNo ratings yet
- Empirical Correlation Finding The Role of Temperature and Particle Size For Nanofluid (Al2O3) Thermal Conductivity EnhancementDocument4 pagesEmpirical Correlation Finding The Role of Temperature and Particle Size For Nanofluid (Al2O3) Thermal Conductivity Enhancementyoussef_pcNo ratings yet
- 38.dynamic Analysis of Multi-Storey RCC BuildingDocument7 pages38.dynamic Analysis of Multi-Storey RCC BuildingSubash MallampalliNo ratings yet
- Fourier Solution of Mercury's PerihelionDocument4 pagesFourier Solution of Mercury's PerihelionJoe NahhasNo ratings yet
- Chapter 8 - Trigonometric Identities PDFDocument71 pagesChapter 8 - Trigonometric Identities PDFMAHESH SINGHNo ratings yet
- Kepler Laws Lab v1Document18 pagesKepler Laws Lab v1Jun Karren Caparoso100% (1)
- Plasma Kinetic Theory Lecture Script: September 28, 2010Document14 pagesPlasma Kinetic Theory Lecture Script: September 28, 2010Puryadi PhysicsNo ratings yet
- Structural Mechanism of Traditional Wooden Frames by Dynamic and Static TestsDocument15 pagesStructural Mechanism of Traditional Wooden Frames by Dynamic and Static TestsMarimuthu KaliyamoorthyNo ratings yet
- Assignment 2 - Keys CouplingsDocument1 pageAssignment 2 - Keys CouplingsTato Mini50% (2)
- Seismic Performance of Lightweight Concrete StructDocument6 pagesSeismic Performance of Lightweight Concrete StructIZIMBANo ratings yet
- Mcqs On HeatDocument13 pagesMcqs On HeatParshantKumarBajajNo ratings yet
- Cross Flow Part 1Document5 pagesCross Flow Part 1mohmmad othmanNo ratings yet
- 0 C3 01Document24 pages0 C3 01danytiger132No ratings yet
- Table III Load Criteria Uniform Bearing On Soil Type "C": Notes For Load TablesDocument1 pageTable III Load Criteria Uniform Bearing On Soil Type "C": Notes For Load TablesDhina karanNo ratings yet
- The Pore-Pressure Coefficients A and B: A (Ao, - AU,) ) Est Mentally B Are Given. BDocument5 pagesThe Pore-Pressure Coefficients A and B: A (Ao, - AU,) ) Est Mentally B Are Given. BdaveNo ratings yet
- DNV OS-H102 Marine Operations Design and Fabrication 2012-01Document12 pagesDNV OS-H102 Marine Operations Design and Fabrication 2012-01Marios DiasNo ratings yet
- Post-Tensioned Anchorage Zone - A ReviewDocument18 pagesPost-Tensioned Anchorage Zone - A ReviewPartha Pratim RoyNo ratings yet
- Quantities Dimensions MKS and CGS UnitsDocument2 pagesQuantities Dimensions MKS and CGS UnitsSanjayNo ratings yet
- Soft Robotic SnakeDocument7 pagesSoft Robotic SnakeGeorge SamNo ratings yet
- Aqa MM1B W QP Jan10Document8 pagesAqa MM1B W QP Jan10Vishav JeetNo ratings yet
- Semester:: Yeshiva University Yeshiva CollegeDocument6 pagesSemester:: Yeshiva University Yeshiva CollegeMark KaplanNo ratings yet
- FM I MCQ 1 - MoodleDocument4 pagesFM I MCQ 1 - MoodleGiridhari ChandrabansiNo ratings yet
- OK Flux 10.62 (Low-Alloyed Steels)Document4 pagesOK Flux 10.62 (Low-Alloyed Steels)גרבר פליקסNo ratings yet
- Solek - Identification of The Steel - AMM - 1 - 2017Document6 pagesSolek - Identification of The Steel - AMM - 1 - 2017A ChakourNo ratings yet
- Notes - Topic 12 Motion in A Circle - CAIE Physics A-LevelDocument3 pagesNotes - Topic 12 Motion in A Circle - CAIE Physics A-LevelShikha KulkarniNo ratings yet
- CC Mod5Document121 pagesCC Mod5ananyanagaral06No ratings yet