You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Business AgilityDocument40 pagesBusiness Agilityqtrang_1911No ratings yet
- ACKNOWLEDGEMENTDocument27 pagesACKNOWLEDGEMENTSaqib PandorNo ratings yet
- 2015 PSPM Kedah Fizik2 W AnsDocument32 pages2015 PSPM Kedah Fizik2 W Ansjee2kk90% (10)
- EnglishexamDocument10 pagesEnglishexamSushant YadavNo ratings yet
- Tic, Toc: Pendulum Motion: Activity Teacher InformationDocument2 pagesTic, Toc: Pendulum Motion: Activity Teacher InformationSergioNo ratings yet
- LIT Sullair OFD1550 Tier 4 Final Brochure - PAP1550OFDT4F202102-7 - ENDocument4 pagesLIT Sullair OFD1550 Tier 4 Final Brochure - PAP1550OFDT4F202102-7 - ENbajabusinessNo ratings yet
- AN2799 Application Note: Measuring Mains Power Consumption With The STM32x and STPM01Document14 pagesAN2799 Application Note: Measuring Mains Power Consumption With The STM32x and STPM01am1liNo ratings yet
- 5 Reception and Hospitality: The Importance of ReceptionDocument12 pages5 Reception and Hospitality: The Importance of ReceptionBryan JamaludeenNo ratings yet
- Mercury Mariner CDI Electronics DVA ChartsDocument16 pagesMercury Mariner CDI Electronics DVA ChartsFstaRockr Burns100% (1)
- Science 7 DLPDocument6 pagesScience 7 DLPMary Apostol0% (1)
- Nilp Education Gov in Nilp About UsDocument2 pagesNilp Education Gov in Nilp About UsH1190506M2009No ratings yet
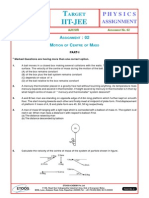
- Motion of Centre of MassDocument3 pagesMotion of Centre of Massmukesh1976No ratings yet
- Space TelescopesDocument141 pagesSpace TelescopesPat StakemNo ratings yet
- پرسیاری ئەحیاDocument447 pagesپرسیاری ئەحیاkishwarahmad026No ratings yet
- PrivacyDocument1 pagePrivacyIsaac FullartonNo ratings yet
- Siprotec 4 Und Siprotec Compact: Service Information FirmwareupdateDocument45 pagesSiprotec 4 Und Siprotec Compact: Service Information FirmwareupdateAbhishek RajputNo ratings yet
- 1902 - Rayleigh - On The Distillation of Binary MixturesDocument17 pages1902 - Rayleigh - On The Distillation of Binary MixturesmontoyazumaetaNo ratings yet
- The Influence of The Integrated Marketing Communication On The Consumer Buying Behaviour PDFDocument5 pagesThe Influence of The Integrated Marketing Communication On The Consumer Buying Behaviour PDFPrimaGriseldaNo ratings yet
- Meghan Math Lesson Plan-2 FeedbackDocument7 pagesMeghan Math Lesson Plan-2 Feedbackapi-242877332No ratings yet
- A Practical Approach To Business Impact AnalysisDocument20 pagesA Practical Approach To Business Impact Analysisqadir147No ratings yet
- Tracer Study of BSAF Graduates of The Kalinga State University - Rizal Campus From 2012 - 2018Document8 pagesTracer Study of BSAF Graduates of The Kalinga State University - Rizal Campus From 2012 - 2018IJELS Research JournalNo ratings yet
- Ceratophyllum Demersum (Rigid Hornwort)Document15 pagesCeratophyllum Demersum (Rigid Hornwort)ador kumarNo ratings yet
- Reinforced Concrete Design-Ii: Course Instructors: Prof. Dr. Asad-ur-Rehman Khan / Dr. Aslam Faqeer MohammadDocument20 pagesReinforced Concrete Design-Ii: Course Instructors: Prof. Dr. Asad-ur-Rehman Khan / Dr. Aslam Faqeer Mohammadzeeshan68No ratings yet
- 2 5px3cywystrfrlsDocument2 pages2 5px3cywystrfrlsKrish0% (1)
- CMP2003 Lecturenotes Week9Document25 pagesCMP2003 Lecturenotes Week9Ammar JagadhitaNo ratings yet
- Proposal For Master DegreeDocument5 pagesProposal For Master DegreemyxtaNo ratings yet
- Chapter 1 5 Group 4Document31 pagesChapter 1 5 Group 4John Patrick TurgoNo ratings yet
- Basic USFMDocument9 pagesBasic USFMVirgilio RezendeNo ratings yet
- Misc-Mock Thermodyamics TestDocument2 pagesMisc-Mock Thermodyamics TestGhenwa DimachkiNo ratings yet
- Programme Specification - Undergraduate Programmes Key FactsDocument11 pagesProgramme Specification - Undergraduate Programmes Key FactsSonia GalliNo ratings yet